一种异构空间网络数传任务协同规划方法
文献发布时间:2023-06-19 10:48:02
技术领域
本发明属于空间信息技术领域,涉及一种异构空间网络数传任务协同规划方法。
背景技术
与传统地面网络相比,空间网络具有覆盖面广、组网灵活、不受地理环境限制等显著优点,其在对地观测、航天测控、远洋航行、紧急搜救等领域发挥着不可替代的作用。长期以来我国军用、民用卫星系统采用“面向特定种类任务独立设计、分部门管理”的烟囱式发展模式,各卫星系统拥有专用的地面接收站,不同系统间的资源无法共享。受到选址、建设成本等限制,各卫星系统拥有的地面站数目较为有限。由于空间任务到达的突发性和分布的非均匀性,部分卫星系统数据无法及时下传,而其它卫星系统地面站处于闲置状态的情况时有发生。
为了解决上述问题,不同卫星系统之间共享地面站逐渐成为新的发展趋势。随着软件无线电、资源虚拟化等技术在卫星通信领域中的应用,全球卫星业务教育网络(GlobalEducation Network for Satellite Operations)、移动立方星指挥控制网络(MobileCubeSat Command and Control Ground Station Network)等支持不同卫星系统间地面站共享的异构空间网络先后被提出,旨在实现全球教育机构或美国政府、高校以及外国合作伙伴之间地面站的共享使用。
尽管单一卫星系统内的数传任务规划方法已经得到了广泛的研究,多卫星系统构成的异构空间网络中的任务协同规划方法研究仍处于起步阶段,已有工作十分有限。Nakamura等人通过在网络中增加一个中央服务器与所有卫星系统的运控中心相连,由中央服务器对全网任务进行统一规划,并将规划结果下发到各运控中心执行。类似的,Iacopino等人将所有卫星系统的运控中心的功能合并,建立一个总运控中心,并提出了一种基于蚁群算法的任务规划方法实现对全网资源的统一管理。然而,数传任务规划是一个典型的NP完全问题,统一规划全网所有任务计算复杂度较高,而且,现阶段我国军用、民用卫星系统隶属于不同行政部门,部分任务、资源信息具有较强的私密性,不便提供给其它单位,因此集中式任务规划方法目前在我国不具备可行性。面对集中式任务协同规划的问题,Johnston等人提出了一种分布式的异构空间网络任务协同规划方法,各运控中心通过点对点协商实现了共享地面站的互使用。该方法既能够有效控制各运控中心任务规划问题的规模,且避免了各卫星系统除共享地面站调度信息以外的信息公开,但是,随着参与协作的卫星系统数目不断增长,一个卫星系统可能同时与多个系统共享资源,仅依靠本地信息进行点对点协商收敛速度慢难以达到全局最优,计算的复杂性较高。
发明内容
本发明的目的在于克服上述现有技术的缺点,提供了一种异构空间网络数传任务协同规划方法,该方法的收敛速度快,计算复杂性较低。
为达到上述目的,本发明所述的异构空间网络数传任务协同规划方法包括以下步骤:
1)初始化异构空间网络的基本参数;
2)建立异构空间网络的时间扩展图;
3)各卫星系统建立待优化本地变量,将待优化本地变量中的0-1变量松弛为连续变量,建立本地任务规划问题优化模型P;
4)协同中心及卫星系统初始化迭代参量,即令迭代次数t=0,全局变量y
5)各卫星系统求解本地任务规划问题优化模型P,并根据求解结果更新本地变量,并将全局变量本地副本
6)协同中心更新全局变量y
7)各卫星系统更新拉格朗日乘子λ
8)更新迭代次数t,令t=t+1;
9)当||y
10)协同中心还原全局松弛变量y
11)各卫星系统还原本地松弛变量,获得本地变量的最优解;
12)各卫星系统根据本地变量最优解获取最优任务规划与资源调度方案。
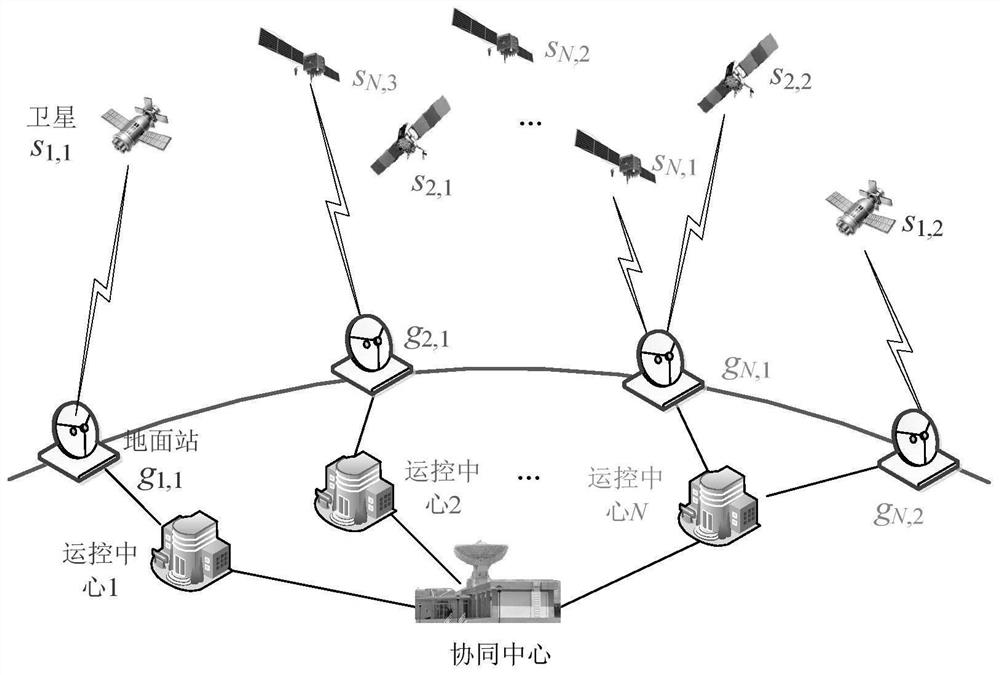
步骤1)中的异构空间网络包含一个协同中心和N个卫星系统,该网络的基本参数包括异构空间网络中的协同中心C、卫星系统集合N、卫星集合S=∪
步骤2)中的异构空间网络的时间扩展图表示为G
步骤3)的具体操作过程为:
3a)卫星系统
其中,z
3b)卫星系统n∈N将本地变量中的0-1变量松弛为连续变量,即令
3c)建立本地任务规划问题优化模型P,对于第n个卫星系统,本地任务规划问题优化模型P为:
s.t.
其中,w
协同中心通过下式计算y
卫星系统n∈N通过下式计算
步骤10)的具体操作为:
10a)初始化未还原全局松弛变量所对应的链路弧集合A
10b)若
10c)在集合A
10d)协同中心向卫星系统m、n发出调度请求
10e)当卫星系统m及n都同意调度,即,
10f)令
10g)对于任一链路弧
10h)令
步骤11)的具体操作为:
11a)初始化待还原本地松弛变量所对应的链路弧集合A
11b)当
11c)寻找链路弧
11d)当存在链路弧
11e)令
11f)令
11g)固定本地任务规划问题优化模型P中的变量
11h)当存在任务om
11i)令
11j)令
11k)将已经固定的变量代入本地任务规划问题优化模型P中,再求解本地任务规划问题优化模型,然后转至步骤11h)。
本发明具有以下有益效果:
本发明所述的异构空间网络数传任务协同规划方法在具体操作时,基于时间扩展图建立本地任务规划问题优化模型,在此基础上,利用交替方向乘子法将该优化问题分解为各卫星系统基于本地信息以及协同中心发布的共享资源协调信息进行本地规划子问题的求解,卫星系统通过与协同中心交互可共享地面站资源的调度信息及协调信息,协同求解本地规划子问题,从而完成异构空间网络任务协同规划,与现有技术相比,本发明无需对外提供本地任务和非共享地面站的任何信息,且不会导致高复杂度的计算,同时由于协同中心能从全局角度对各卫星系统可共享资源的使用情况进行调整,因此能够以较快的速度逼近全局最优任务规划方案。
附图说明
图1为本发明的异构空间网络场景图;
图2为本发明的时间扩展图;
图3为本发明的流程图;
图4为本发明的协同中心全局松弛变量还原算法的流程图;
图5为本发明的卫星系统n本地松弛变量还原算法的流程图。
具体实施方式
下面结合附图对本发明做进一步详细描述:
参考图1、图2及图3,本发明所述的异构空间网络数传任务协同规划方法包括以下步骤:
1)初始化异构空间网络的基本参数;
参考图1,步骤1)中的异构空间网络包含一个协同中心和N个卫星系统,该网络的基本参数包括异构空间网络中的协同中心C、卫星系统集合
2)建立异构空间网络的时间扩展图;
参考图2,步骤2)中的异构空间网络的时间扩展图表示为G
3)各卫星系统建立待优化本地变量,将待优化本地变量中的0-1变量松弛为连续变量,建立本地任务规划问题优化模型P;
步骤3)的具体操作过程为:
3a)卫星系统
其中,z
3b)卫星系统
3c)建立本地任务规划问题优化模型P,对于第n个卫星系统,本地任务规划问题优化模型P为:
s.t.
其中,w
4)协同中心及各卫星系统初始化迭代参量,即迭代次数t=0,全局变量y
5)卫星系统
6)协同中心更新全局变量y
协同中心通过下式计算y
7)卫星系统n∈N更新拉格朗日乘子λ
卫星系统
8)更新迭代次数t,令t=t+1;
9)当||y
10)协同中心还原全局松弛变量y
参考图4,步骤10)的具体操作为:
10a)初始化未还原全局松弛变量所对应的链路弧集合A
10b)若
10c)在集合A
10d)协同中心向卫星系统m、n发出调度请求
10e)当卫星系统m及n都同意调度,即,
10f)令
10g)对于任一链路弧
10h)令
11)卫星系统
参考图5,步骤11)的具体操作为:
11a)初始化待还原本地松弛变量所对应的链路弧集合A
11b)当
11c)寻找链路弧
11d)当存在链路弧
11e)令
11f)令
11g)固定本地任务规划问题优化模型P中的变量
11h)当存在任务om
11i)令
11j)令
11k)将已经固定的变量代入本地任务规划问题优化模型P中,再求解本地任务规划问题优化模型,然后转至步骤11h);
12)各卫星系统根据本地变量最优解获取最优任务规划与资源调度方案。
- 一种异构空间网络数传任务协同规划方法
- 一种光学卫星相控阵数传任务太阳光规避姿态规划方法