一种踏板系统和梯子
文献发布时间:2023-06-19 13:45:04
技术领域
本发明涉及梯子技术领域,特别涉及一种踏板系统和梯子。
背景技术
在工厂、园林果园、苗木树木修剪等登高作业中,梯子是人们登高作业的有效工具。现有的梯子在使用过程中占有空间大,使用不方便,不利于用户的登高作业。
发明内容
本发明的目的在于解决现有的梯子使用不方便的问题。本发明提供了一种踏板系统,踏板系统上的支柱踏板可供用户踩踏,便于用户登高作业,并能够相对支柱实现收纳。
为解决上述技术问题,本发明的实施方式公开了一种踏板系统,包括:支柱;支柱踏板,套设并支撑于所述支柱,所述支柱踏板能够沿周向环绕所述支柱旋转设定角度,以在不同位置间切换;或者,所述支柱踏板能够相对所述支柱折叠或打开,以在不同位置间切换。
采用上述技术方案,梯子上的支柱踏板可供用户踩踏,便于用户登高作业,并能够相对支柱旋转和折叠,实现收纳,减小占用空间。支柱踏板收合后可防止倒塌或撞击造成支柱踏板的损伤。
根据本发明的另一具体实施方式,所述支柱踏板能够相对所述支柱折叠或打开,以在不同位置间切换,所述不同位置包括收纳位置和踩踏位置;其中,在所述收纳位置,所述支柱踏板平行于所述支柱;在所述踩踏位置,所述支柱踏板供用户踩踏。
根据本发明的另一具体实施方式,所述支柱踏板能够沿周向环绕所述支柱旋转设定角度,以在不同位置间切换,所述不同位置包括收纳位置和踩踏位置;其中,在所述收纳位置,所述支柱踏板朝向所述梯架设置;在所述踩踏位置,所述支柱踏板供用户踩踏。
根据本发明的另一具体实施方式,所述踩踏位置至少为两个。
根据本发明的另一具体实施方式,所述设定角度在0°和360°之间。
根据本发明的另一具体实施方式,所述设定角度为180°。
根据本发明的另一具体实施方式,所述支柱踏板能够沿所述支柱的延伸方向向上运动,再沿所述周向环绕所述支柱旋转设定角度后,沿所述支柱的延伸方向向下运动,以在所述不同位置间切换;其中,
所述支柱踏板在所述不同位置间切换之前和之后,所述支柱踏板在所述周向的运动受到限制。
根据本发明的另一具体实施方式,所述支柱的外表面凸设有固定座,所述固定座沿所述周向设有至少两个卡槽,每一个所述卡槽沿所述支柱的延伸方向延伸,且每一个所述卡槽的底部设有支撑部;
所述支柱踏板的内壁凸设有至少一个与所述卡槽相配合的卡块;
所述支柱踏板在所述不同位置间切换之前和之后,所述支柱踏板的内壁套设于所述固定座的外表面,所述卡块位于所述卡槽内,并支撑在所述支撑部;
所述支柱踏板的内壁的能够沿所述支柱的延伸方向相对所述固定座向上运动,直至所述卡块与所述卡槽分离,再沿所述周向环绕所述支柱的外表面旋转设定角度后,所述卡块沿所述卡槽向下运动,直至所述卡块支撑在所述支撑部,以在所述不同位置间切换。
根据本发明的另一具体实施方式,所述卡块的数量为一个、两个、三个、四个。
根据本发明的另一具体实施方式,所述卡槽的数量包括两个、三个、四个、八个。
根据本发明的另一具体实施方式,所述至少两个卡槽沿所述周向等间距分布。
根据本发明的另一具体实施方式,所述固定座能够沿所述支柱的延伸方向移动设定距离后与所述支柱的外表面固定连接。
根据本发明的另一具体实施方式,沿所述支柱的延伸方向,所述支柱踏板距离所述支柱的顶部的距离为250mm至500mm。
本申请还提供了一种梯子,包括:梯架;上述任一项所述的踏板系统,所述踏板系统中的所述支柱的顶部与所述梯架转动连接,以使所述梯子在折叠状态和展开状态间切换。
根据本发明的另一具体实施方式,所述梯架包括两个梯脚和梯架踏板,所述两个梯脚设于所述梯架的底部,所述梯架踏板设于所述梯架的顶部和所述两个梯脚之间;所述支柱的底部设有梯脚,所述梯子在展开状态时通过梯脚实现着地。
根据本发明的另一具体实施方式,所述梯架的顶部设有梯台,所述支柱的顶部与所述梯台转动连接。
根据本发明的另一具体实施方式,所述梯架和所述支柱的材质为铝合金或镁合金或钢材。
根据本发明的另一具体实施方式,所述支柱和所述梯架之间设有限位件,用于限制所述梯子的最大展开角度。
根据本发明的另一具体实施方式,所述限位件为链条,所述链条的两端分别连接所述支柱和所述梯架。
附图说明
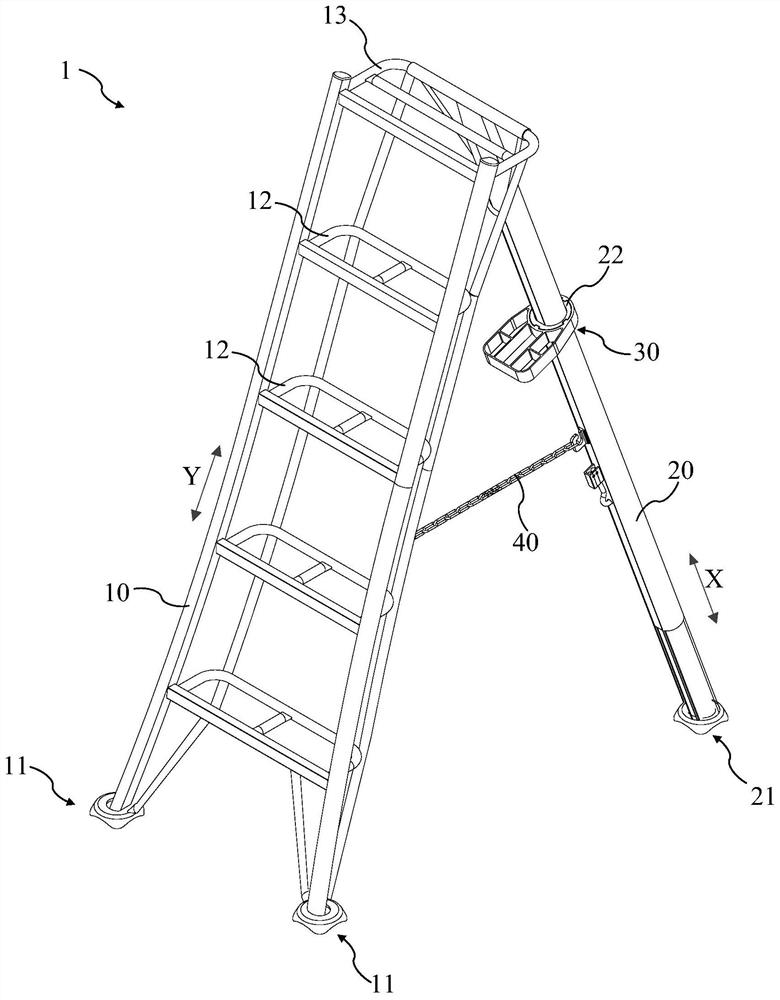
图1示出本发明实施例梯子的立体图一;
图2示出本发明实施例梯子的立体图二;
图3示出本发明实施例梯子的立体图三;
图4示出本发明实施例梯子的使用状态示意图;
图5示出本发明实施例梯子的支柱的立体图一;
图6示出本发明实施例梯子的支柱的立体图二;
图7示出本发明实施例梯子的支柱踏板的结构示意图;
图8示出本发明实施例梯子的支柱的固定座的结构示意图。
具体实施方式
以下由特定的具体实施例说明本发明的实施方式,本领域技术人员可由本说明书所揭示的内容轻易地了解本发明的其他优点及功效。虽然本发明的描述将结合较佳实施例一起介绍,但这并不代表此发明的特征仅限于该实施方式。恰恰相反,结合实施方式作发明介绍的目的是为了覆盖基于本发明的权利要求而有可能延伸出的其它选择或改造。为了提供对本发明的深度了解,以下描述中将包含许多具体的细节。本发明也可以不使用这些细节实施。此外,为了避免混乱或模糊本发明的重点,有些具体细节将在描述中被省略。需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合。
应注意的是,在本说明书中,相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步定义和解释。
为使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明的实施方式作进一步地详细描述。
参考图1至图3,本申请提供一种梯子1,本申请以梯子1为三脚折叠梯为示例说明,但本申请不限于是三脚折叠梯,还可以是其它类型的梯子(例如四脚梯),能够安装后述的踏板系统。梯子1包括:梯架10和踏板系统的支柱20。示例性地,梯架10和支柱20的材质为铝合金或镁合金或钢材。示例性地,本申请的梯架10包括两个梯脚11和梯架踏板12,两个梯脚11设于梯架10的底部,梯架踏板12设于梯架10的顶部和两个梯脚11之间。本申请的梯架踏板12的形状和数量不做限制,图1和图3中示出了四个梯架踏板12。在一些可能的实施方式中,根据登高作业的需要,可以设置其它数量的梯架踏板12。示例性地,四个梯架踏板12相互平行设置。上述梯架踏板12的两端分别连接梯架10的梯杆,示例性地,梯杆由梯架10的底部延伸到梯架10的顶部。
上述的支柱20的顶部与梯架10转动连接,以使梯子1在折叠状态和展开状态(图1和图3所示)间切换,支柱20的底部设有一个梯脚21。示例性地,支柱20和梯架10相对转动,以由展开状态切换到折叠状态。
梯子1在捆包运输或不使用时,梯子1在折叠状态,支柱20和梯架10相互贴合,可以减少占地空间。当使用梯子1时,梯子1在展开状态,通过上述的梯脚实现着地。示例性地,梯子1在展开状态,支柱20的延伸方向(图1中X方向所示)和梯架10的延伸方向(图1中Y方向所示)的夹角呈锐角设置。示例性地,上述的支柱20呈圆管或者椭圆状。
继续参考图1至图3,本申请的梯子1还包括踏板系统的支柱踏板30,支柱踏板30套设并支撑于支柱20。示例性地,支柱踏板30垂直于支柱20。其中,支柱踏板30能够沿周向(图2中B方向所示)环绕支柱20旋转设定角度,以在不同位置间切换。支柱踏板30供用户踩踏,当梯子1处于打开状态时,例如进行园林果园、苗木树木修剪等登高作业时,用户可以一只脚踩踏在梯架10的梯架踏板12上,另外一只脚踩踏在支柱踏板30上,便于用户登高作业。
示例性地,沿支柱20的延伸方向,支柱踏板30距离支柱20的顶部的距离为250mm至500mm,包括250mm和500mm。在此参数范围内,用户便于踩踏在支柱踏板30上。
示例性地,上述的不同位置包括收纳位置(图1中所示)和踩踏位置(图3中所示)。通过旋转支柱踏板30以由收纳位置切换为踩踏位置,或者,由踩踏位置切换为收纳位置。其中,踩踏位置是梯子1处于展开状态时,供用户踩踏的位置;收纳位置是梯子1处于折叠状态时,处于收纳状态的位置。
这样设置后,当梯子1在捆包运输或不使用时,将支柱踏板30旋转收合处于收纳位置,这样减少占地空间,同时,支柱踏板30收合后可防止倒塌或撞击造成支柱踏板30的损伤。
示例性地,参考图1,在上述的收纳位置,支柱踏板30朝向梯架10设置;参考图3,在踩踏位置,支柱踏板30供用户踩踏。
在一些可能的实施方式中,支柱踏板30能够相对支柱20折叠或打开,以在不同位置间切换。同样,上述的不同位置包括收纳位置和踩踏位置;其中,在收纳位置,支柱踏板30平行于支柱20;在踩踏位置,支柱踏板30供用户踩踏。
本申请以支柱踏板30环绕支柱20旋转的方式在不同位置间切换为示例说明。
在一些可能的实施方式中,上述支柱踏板30环绕支柱20旋转的设定角度在0°和360°之间,不包括0°。即,支柱踏板30能够沿周向环绕支柱20旋转0°至360°之间的任一角度(不包括0°),以在不同位置间切换。设定的角度例如是30°、45°、60°、90°、120°、180°、210°等角度。
本申请以设定角度为180°为示例说明。参考图1和图3,支柱踏板30能够沿周向环绕支柱20旋转180°,以在收纳位置和踩踏位置间切换。即,当支柱踏板30处于收纳位置时(图1所示),支柱踏板30沿周向环绕支柱20旋转180°后,支柱踏板30处于踩踏位置(图3所示)。或者,当支柱踏板30处于踩踏位置时(图3所示),支柱踏板30沿周向环绕支柱20旋转180°后,支柱踏板30处于收纳位置(图1所示)。上述的支柱踏板30可以是沿周向正向或反向旋转180°,以在收纳位置和踩踏位置间切换。这样设置,可以提升用户踩踏的便利性和稳定性。
在一些可能的实施方式中,踩踏位置至少为两个。即,支柱踏板30可以由收纳位置在周向旋转到不同的踩踏位置,便于用户根据登高作业的需要进行踩踏位置的调整。以踩踏位置为三个进行示例说明。例如,支柱踏板30由收纳位置沿周向环绕支柱20旋转90°后,切换到第一个踩踏位置;或者,支柱踏板30由收纳位置沿周向环绕支柱20旋转120°后,切换到第二个踩踏位置;或者,支柱踏板30由收纳位置沿周向环绕支柱20旋转180°后,切换到第三个踩踏位置。
从而,用户根据作业需要选择将支柱踏板30由收纳位置切换到第一个踩踏位置或第二个踩踏位置或第三个踩踏位置。
继续参考图1至图3,并结合图4至图8所示,本申请的支柱踏板30能够沿支柱20的延伸方向向上(图2和图4中A方向所示)运动,再沿周向(图2和图4中B方向所示)环绕支柱20旋转设定角度后,沿支柱20的延伸方向向下(图3和图4中C方向所示)运动,以在不同位置间切换。其中,支柱踏板30在不同位置间切换之前和之后,支柱踏板30在周向的运动受到限制。
即,本申请的支柱踏板30在不同位置间切换的过程中,先向上取出支柱踏板30(图4中过程①所示),然后再沿周向旋转设定角度,最后再向下放下支柱踏板30(图4中过程②所示)。支柱踏板30在完成了不同位置的切换后,即处于相应的位置(收纳位置或踩踏位置)后,支柱踏板30支撑在支柱20上,在周向不会相对支柱20运动。从而,提升了支柱踏板30在支柱20上的连接稳定性,支柱踏板30的位置不会轻易发生改变,不会产生噪音(例如支柱踏板30和支柱20或者梯架10发生碰撞)。
支柱踏板30和支柱20的连接方式不做限定,能够实现上述的运动形式(图4所示)都属于本申请的保护范围。
在一些可能的实施方式中,参考图2、图5、图7和图8,本申请的支柱20的外表面凸设有固定座22,固定座22沿周向设有至少两个卡槽221,每一个卡槽221沿支柱20的延伸方向延伸,且每一个卡槽221的底部设有支撑部222;支柱踏板30的内壁凸设有至少一个与卡槽221相配合的卡块31。支柱踏板30在不同位置间切换之前和之后,支柱踏板30的内壁套设于固定座22的外表面,卡块31位于卡槽221内,并支撑在支撑部222。
支柱踏板30的内壁的能够沿支柱20的延伸方向相对固定座22向上运动,卡块31也相应地相对卡槽221向上运动,直至卡块31与卡槽221分离(图2所示),支柱踏板30再沿周向环绕支柱20的外表面旋转设定角度后,卡块31对齐卡槽221,并沿卡槽221向下运动,直至卡块31支撑在支撑部222,以在不同位置间切换。
即,支柱踏板30使用时(由收纳位置切换到踩踏位置):支柱踏板30从固定座22向上取出,然后向外旋转,往下套入固定座22进行固定。
支柱踏板30不使用时(由踩踏位置切换到收纳位置):支柱踏板30从固定座22向上取出,然后向内旋转,往下套入固定座22固定。
图7中的(a)至(d)分别示出卡块31的数量为一个、两个、三个、四个。图8中的(a)至(d)分别示出卡槽221的数量包括两个、三个、四个、八个。本申请的卡块31的数量和卡槽221的数量不限于此,可以根据支柱踏板30在周向旋转的角度设置相应数量的卡块31和卡槽221。
本申请中,图1至图6中示出支柱踏板30在周向旋转的角度为180°,其中,卡块31的数量为四个(如图7中(d)所示),卡槽221的数量也为四个(如图8中(c)所示)。四个卡槽221沿周向等间距分布。支柱踏板30在收纳位置和踩踏位置时,四个卡块31分别位于相应的四个卡槽221内。从而,踩踏位置为三个。例如,支柱踏板30由收纳位置沿周向正向环绕支柱20旋转90°后,切换到第一个踩踏位置;或者,支柱踏板30由收纳位置沿周向正向环绕支柱20旋转180°后,切换到第二个踩踏位置;或者,支柱踏板30由收纳位置沿周向正向环绕支柱20旋转270°后,切换到第三个踩踏位置。
在一些可能的实施方式中,如图8中(a)所示,卡槽221的数量为两个,两个卡槽221沿周向等间距分布,卡块31的数量可以是一个(图7中(a)所示),踩踏位置是一个。或者,卡块31的数量可以是两个(图7中(b)所示),踩踏位置是一个。
在一些可能的实施方式中,如图8中(b)所示,卡槽221的数量为三个,三个卡槽221沿周向等间距分布,卡块31的数量可以是一个(图7中(a)所示),踩踏位置是两个。或者,卡块31的数量可以是三个(图7中(c)所示),踩踏位置是两个。
在一些可能的实施方式中,如图8中(d)所示,卡槽221的数量为八个,八个卡槽221沿周向等间距分布,卡块31的数量可以是一个(图7中(a)所示),踩踏位置是七个。或者,卡块31的数量可以是两个(图7中(b)所示),踩踏位置是七个。或者,卡块31的数量可以是三个(图7中(c)所示)。或者,卡块31的数量可以是四个(图7中(d)所示)。
示例性地,上述的固定座22和支撑部222通过焊接的方式与支柱20的外表面连接,工艺简单,加工方便。但本申请不限于此,在一些可能的实施方式中,可以通过螺丝、铆钉、拉钉、冲压倒扣等方式实现固定座22和支撑部222与支柱20的外表面连接。
在一些可能的实施方式中,固定座22能够沿支柱20的延伸方向移动设定距离后与支柱20的外表面固定连接。即,固定座22在支柱20上的位置可以改变,这样可以改变支柱踏板30在支柱20上的位置,可以根据用户的身高确定支柱踏板30的设置位置,以便于用户踩踏支柱踏板30,实现登高作业。
在一些可能的实施方式中,支柱20上可以设置多个支柱踏板30,例如图6中示出了在支柱20上设置了两个支柱踏板30。这样,可以向用户提供更多的踩踏位置,方便用户进行登高作业。
在一些可能的实施方式中,参考图1至图3,本申请的梯架10的顶部设有梯台13,支柱20的顶部与梯台13转动连接。便于梯子1的折叠,减少占地空间。
在一些可能的实施方式中,参考图1至图3,支柱20和梯架10之间设有限位件40,用于限制梯子1的最大展开角度。即,在限位件40的作用下,支柱20和梯架10之间的夹角得到控制,防止支柱20和梯架10展开过大角度,梯子1不能稳定地放置在地面上。
示例性地,上述的限位件40为链条,链条的两端分别连接支柱20和梯架10。链条分别拉扯支柱20和梯架10,以限制梯子1的最大展开角度。示例性地,梯子1的最大展开角度为30°、45°等锐角。
虽然通过参照本发明的某些优选实施方式,已经对本发明进行了图示和描述,但本领域的普通技术人员应该明白,以上内容是结合具体的实施方式对本发明所作的进一步详细说明,不能认定本发明的具体实施只局限于这些说明。本领域技术人员可以在形式上和细节上对其作各种改变,包括做出若干简单推演或替换,而不偏离本发明的精神和范围。