一种智能扫地机器人的对向刷清扫机构
文献发布时间:2023-06-19 13:48:08
技术领域
本发明涉及人工智能机器人技术领域,具体为一种智能扫地机器人的对向刷清扫机构。
背景技术
现扫地机器人已较为普及,通过其清扫前端的三叶刷将地面灰尘扫进机器人底部的吸风口后通过内部负压将室内灰尘吸附进设备内再经过滤网过滤出来。但现有的扫吸机构通过三叶刷清扫效果差,转速太高易将灰尘扫飞,太低扫不动较重脏污,且即使室内垃圾被扫入机器人底部,也无法保证其百分百被吸附,仍有毛发等难以被吸附的垃圾不仅无法清理,还会缠绕机器人车轮,影响其工作,部分厂商在底部增加地拖或刮板以应付顽固脏污,但其往往需要在设备清扫结束后人工清洗,且对砖缝等位置清洁效果差。
发明内容
(一)解决的技术问题
依智能制造发展要求,针对现有技术的不足,本发明提供了一种智能扫地机器人的对向刷清扫机构,具备对不同垃圾清洁效果好的优点,解决了上述背景技术中的问题。
(二)技术方案
为实现上述对不同垃圾清洁效果好目的,本发明提供如下技术方案:一种智能扫地机器人的对向刷清扫机构,包括外壳,所述外壳的底部前侧设置有直毛刷,所述直毛刷的两侧设置有三叶刷,所述直毛刷的后方设置有集尘口,所述集尘口的内壁设置有挡尘板,所述挡尘板远离挡尘板的内侧设置有吸风口,所述集尘口的后方设置有集尘盒,所述集尘盒的两侧设置滚轮,所述集尘口两侧设置有动力盒,所述动力盒的端部设置有驱动轮毂,所述驱动轮毂的内侧对称设置有两个行星轮,所述行星轮的远离集尘口的外侧啮合连接有变向轮,所述变向轮的中心耦接有内轴,所述行星轮的靠近集尘口的一侧啮合连接有对向轮,所述对向轮的右端固定连接有外轴,所述外轴靠近对向轮的端部设置有限速器,所述限速器靠近集尘口的内侧设置有分离轮,所述分离轮同轴耦接有分离杆,所述分离杆的另一端活动连接有排刷。
优选的,所述直毛刷以靠近清扫方向前侧向下转动,其两端设置有驱动电机。
优选的,所述挡尘板下底面为弧面,上底面与集尘口内壁适配。
优选的,所述驱动轮毂外设置有外齿环与外部主动齿轮啮合。
优选的,所述内轴端部延伸出驱动轮毂与独立驱动电机主轴耦接。
优选的,所述外轴端部与对向轮连接处设置有耦接座,其内相对内轴两侧设置有两个分离轮与内轴上的螺纹适配。
优选的,所述左右分离轮设置平面相互垂直。
优选的,所述排刷截面为迎风翼型,其升阻比等于一,其外侧设置有刷毛。
优选的,所述排刷远离分离轮侧活动连接有连杆与外轴铰接,与分离杆构成双连杆机构。
(三)有益效果
与现有技术相比,本发明提供了一种智能扫地机器人的对向刷清扫机构,具备以下有益效果:
1、该智能扫地机器人的对向刷清扫机构,通过排刷跟随外轴转动,与直毛刷转向相反,以保证被刷进设备底部的灰尘被排刷拦截并在吸尘口位置被吸进集尘盒内,不会直接从设备后方飞出。
2、该智能扫地机器人的对向刷清扫机构,通过驱动轮毂带动变向轮与对向轮同步转动,同时内轴控制排刷交替张合,在毛刷清除顽固脏污的同时,不断张合防止被毛发等长丝缠绕。
3、该智能扫地机器人的对向刷清扫机构,通过控制排刷截面保证其风阻最小的同时,因中部为垂直的四排刷,其清扫频率更高,表面空气流速更快,相比两侧压强更低,有助于清扫的扬尘向中间聚集,从而更易被吸风口吸入。
附图说明
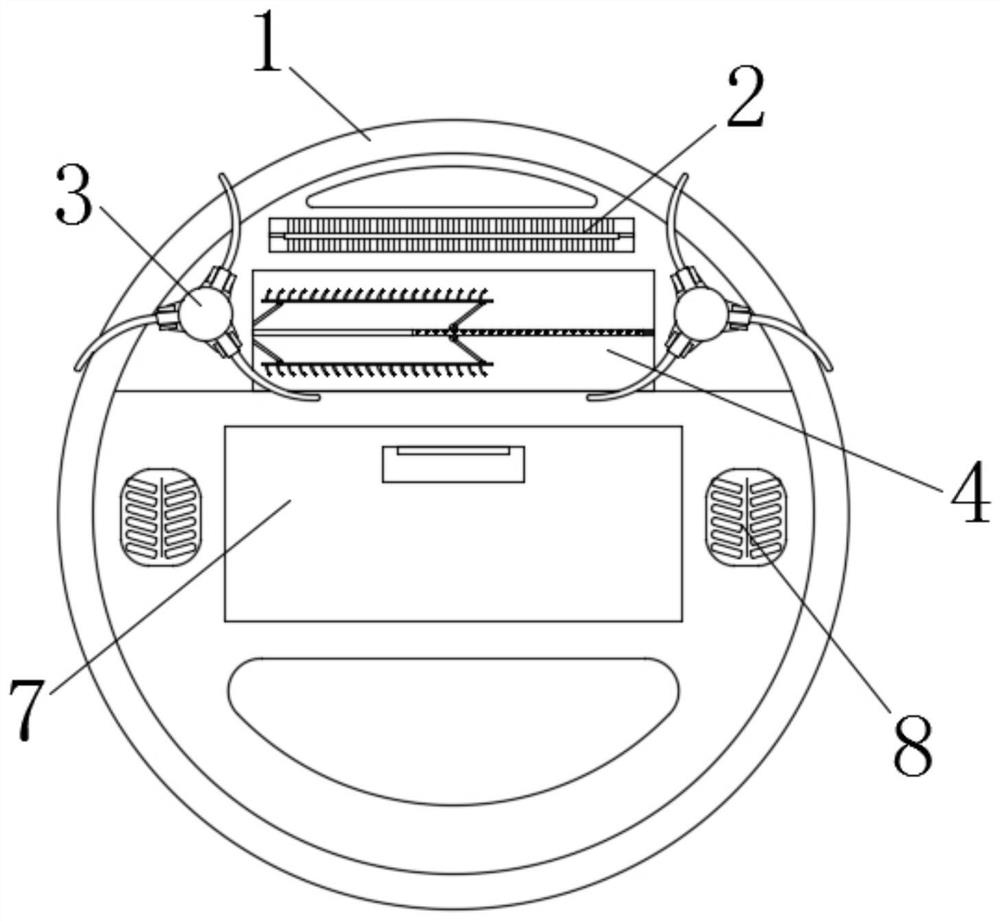
图1为本发明底部正视示意图;
图2为本发明清扫结构部分示意图;
图3为本发明排刷中部位置截面示意图;
图4为本发明对向排刷结构示意图;
图5为本发明排刷驱动结构示意图。
图中:1、外壳;2、直毛刷;3、三叶刷;4、集尘口;5、挡尘板;6、吸风口;7、集尘盒;8、滚轮;9、动力盒;10、驱动轮毂;11、行星轮;12、变向轮;13、内轴;14、对向轮;15、外轴;16、限速器;17、分离轮;18、分离杆;19、排刷。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
请参阅图1-5,一种智能扫地机器人的对向刷清扫机构,包括外壳1,外壳1的底部前侧设置有直毛刷2,直毛刷2的两侧设置有三叶刷3,直毛刷2的后方设置有集尘口4,集尘口4的内壁设置有挡尘板5,挡尘板5远离挡尘板5的内侧设置有吸风口6,集尘口4的后方设置有集尘盒7,集尘盒7的两侧设置滚轮8,集尘口4两侧设置有动力盒9,动力盒9的端部设置有驱动轮毂10,驱动轮毂10的内侧对称设置有两个行星轮11,行星轮11的远离集尘口4的外侧啮合连接有变向轮12,变向轮12的中心耦接有内轴13,行星轮11的靠近集尘口4的一侧啮合连接有对向轮14,对向轮14的右端固定连接有外轴15,外轴15靠近对向轮14的端部设置有限速器16,限速器16靠近集尘口4的内侧设置有分离轮17,分离轮17同轴耦接有分离杆18,分离杆18的另一端活动连接有排刷19。
其中,直毛刷2以靠近清扫方向前侧向下转动,其两端设置有驱动电机。
其中,挡尘板5下底面为弧面,上底面与集尘口4内壁适配。
其中,驱动轮毂10外设置有外齿环与外部主动齿轮啮合。
其中,内轴13端部延伸出驱动轮毂10与独立驱动电机主轴耦接。
其中,外轴15端部与对向轮14连接处设置有耦接座,其内相对内轴13两侧设置有两个分离轮17与内轴13上的螺纹适配。
其中,左右分离轮17设置平面相互垂直。
其中,排刷19截面为迎风翼型,其升阻比等于一,其外侧设置有刷毛。
其中,排刷19远离分离轮17侧活动连接有连杆与外轴15铰接,与分离杆18构成双连杆机构。
工作原理:该智能扫地机器人的对向刷清扫机构,外壳1的底部前侧设置有直毛刷2,直毛刷2的两侧设置有三叶刷3,直毛刷2的后方设置有集尘口4,三叶刷3将灰尘扫略至设备清洁路线上后,随设备向前移动,直毛刷2以靠近清扫方向前侧向下转动,将垃圾向后拨扫至后方,又限速器16靠近集尘口4的内侧设置有分离轮17,分离轮17同轴耦接有分离杆18,分离杆18的另一端活动连接有排刷19,排刷19跟随外轴15转动,与直毛刷2转向相反,以保证被刷进设备底部的灰尘被排刷19拦截并在集尘口4位置被吸进集尘盒7内,不会直接从设备后方飞出。
该智能扫地机器人的对向刷清扫机构,动力盒9的端部设置有驱动轮毂10,驱动轮毂10的内侧对称设置有两个行星轮11,行星轮11的远离集尘口4的外侧啮合连接有变向轮12,变向轮12的中心耦接有内轴13,行星轮11的靠近集尘口4的一侧啮合连接有对向轮14,对向轮14的右端固定连接有外轴15,且外轴15端部与对向轮14连接处设置有耦接座,其内相对内轴13两侧设置有两个分离轮17与内轴13上的螺纹适配,内轴13独立转动可驱动对向轮14转动控制排刷19张合,工作时驱动轮毂10带动变向轮12与对向轮14同步转动,同时内轴13控制排刷19交替张合,在毛刷清除顽固脏污的同时,不断张合防止被毛发等长丝缠绕。
又左右分离轮17设置平面相互垂直排刷19截面为迎风翼型,其升阻比等于一,其外侧设置有刷毛,控制排刷19截面保证其风阻最小的同时,因中部为垂直的四排刷19,其清扫频率更高,表面空气流速更快,相比两侧压强更低,有助于清扫的扬尘向中间聚集,从而更易被吸风口6吸入。
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。