动力控制系统和工程机械
文献发布时间:2024-01-17 01:13:28
技术领域
本发明属于工程机械技术领域,尤其涉及一种动力控制系统和工程机械。
背景技术
随着科技的发展,油电混合技术在工程机械中的应用越来越广泛。油电混合工程机械中的传动系统通常是在发动机与油泵之间串联电机,实现油、电驱动油泵,但这种混动形式不能实现能量回收,并且行驶状态动力不能叠加,且串联电机形式速比不能调整,电机的高转速、低扭矩特性不能很好的与液压系统适应,容易出现动力不足;或者通过新增一套电机、油泵动力单元的方式实现混动,实现电动油泵单元与燃油机动力单元可切换,但此种油电混合方式需增加一套油泵系统,成本高。
发明内容
本发明的主要目的是提出一种动力控制系统和工程机械,旨在解决现有技术中混合动力方式不能能量回收且易动力不足的技术问题。
为了实现上述目的,本发明提供一种动力控制系统,用于带有行驶系统和作业系统的工程机械,所述动力控制系统包括:油驱机构,包括发动机和变速箱,所述发动机用于通过所述变速箱向所述作业系统、所述行驶系统提供动能;电驱机构,包括电机和用于向所述电机供电的动力电池,所述电机用于通过所述变速箱向所述作业系统、所述行驶系统提供动能;
主控制器,被配置为:
获取模式指令和操作指令,所述模式指令包括电驱参与指令和常规驱动指令,所述操作指令包括行驶指令和作业指令;
获取到所述电驱参与指令和所述行驶指令的情况下,控制所述发动机向所述行驶系统提供动能,保持所述变速箱和所述作业系统脱开并获取所述行驶系统的实时行驶工况和所述发动机的实时运行状态;
根据所述实时行驶工况控制所述行驶系统向所述动力电池蓄电,根据所述实时运行状态控制所述电机向所述行驶系统提供动能。
在本发明实施例中,所述主控制器被进一步配置为:
获取到所述电驱参与指令和所述作业指令的情况下,控制所述电机向所述作业系统提供动能,保持所述变速箱和所述行驶系统脱开并关停所述发动机。
在本发明实施例中,所述根据所述实时运行状态控制所述电机向所述行驶系统提供动能包括:
根据所述实时运行状态获取所述发动机的油门开度和所述发动机的实时负荷率;
在油门全开且所述实时负荷率大于预设负荷率的情况下,控制所述电机向所述行驶系统提供动能。
在本发明实施例中,所述根据所述实时行驶工况控制所述行驶系统向所述动力电池蓄电包括:
在实时行驶工况处于缓速工况或制动工况的情况下,控制所述行驶系统向所述动力电池蓄电。
在本发明实施例中,所述主控制器被进一步配置为:
获取到所述常规驱动指令和所述作业指令的情况下,控制所述发动机向作业系统提供动能,保持所述变速箱和所述行驶系统脱开并关停所述电机;
获取到所述常规驱动指令和所述行驶指令的情况下,控制所述发动机向行驶系统提供动能,保持所述变速箱和所述作业系统脱开并关停所述电机。
在本发明实施例中,所述动力控制系统还包括两个功率输出器,所述变速箱用于通过其中一个所述功率输出器连接所述作业系统,所述变速箱用于通过另一个所述功率输出器连接所述电机,所述主控制器被进一步配置为:
根据所述模式指令和所述操作指令,脱开或连接两个所述功率输出器和所述变速箱。
在本发明实施例中,所述发动机和所述变速箱之间设置有调节器,所述主控制器被进一步配置为:
在所述发动机处于关停状态情况下,控制所述调节器保持所述发动机和所述变速箱脱开;
在所述发动机处于工作状态情况下,控制所述调节器保持所述发动机和所述变速箱连接。
在本发明实施例中,述电驱机构还包括电源模块,所述电源模块用于连接外接电源和所述电机。
在本发明实施例中,所述动力控制系统还包括用于连接所述行驶系统和所述变速箱的行驶传动轴,所述主控制器被进一步配置为:
获取到所述行驶指令的情况下,控制所述行驶传动轴和所述变速箱连接;
获取到所述作业指令的情况下,控制所述行驶传动轴和所述变速箱脱开。
本发明还提出一种工程机械,所述工程机械包括作业系统、行驶系统和如上所述的动力控制系统。
通过上述技术方案,本发明实施例所提供的动力控制系统具有如下的有益效果:
动力控制系统进行装配时,可先将油驱机构、电驱机构均和主控制器电连接,需要动力控制系统进行动力控制时,可通过主控制器获取模式指令和操作指令,在主控制器获取到电驱参与指令和行驶指令的情况下,主控制器可控制发动机通过变速箱向行驶系统提供动能,保持变速箱和作业系统脱开,主控制器同时获取行驶系统的实时行驶工况和发动机的实时运行状态,可根据实时行驶工况控制行驶系统向动力电池蓄电,实现行驶系统的能量回收,同时可根据实时运行状态控制电机通过变速箱向行驶系统提供动能,电机能通过变速箱进行增扭,发动机和电机共同向行驶系统提供动能,实现行驶状态动力叠加,可避免动力不足的情况。本发明通过发动机和电机供用同一个变速箱,结合行驶系统的实时行驶工况和发动机的实时运行状态控制行驶系统向动力电池进行存储电能、电机配合发动机共同向行驶系统提供功能,能自动能量回收的同时还能避免动力不足的情况。
本发明的其它特征和优点将在随后的具体实施方式部分予以详细说明。
附图说明
附图是用来提供对本发明的理解,并且构成说明书的一部分,与下面的具体实施方式一起用于解释本发明,但并不构成对本发明的限制。在附图中:
图1是根据本发明一实施例中动力控制系统的结构示意图;
图2是根据本发明另一实施例中动力控制系统的结构示意图;
图3是根据本发明一实施例中动力控制系统在一工况下的动力传输原理示意图;
图4是根据本发明一实施例中动力控制系统在另一工况下的动力传输原理示意图;
图5是根据本发明一实施例中动力控制系统在又一工况下的动力传输原理示意图。
附图标记说明
标号 名称 标号 名称
100 动力控制系统 6 行驶传动轴
1 发动机 7 油泵传动轴
2 变速箱 8 油泵总成
3 电机 9 电机传动轴
4 动力电池 10 次控制器
5 功率输出器 200 作业系统
具体实施方式
以下结合附图对本发明的具体实施例进行详细说明。应当理解的是,此处所描述的具体实施例仅用于说明和解释本发明,并不用于限制本发明。
下面参考附图描述根据本发明的动力控制系统。
如图1至图5所示,在本发明的实施例中,动力控制系统100用于带有行驶系统和作业系统200的工程机械,动力控制系统100包括油驱机构、电驱机构和主控制器;油驱机构包括发动机1和变速箱2,发动机1用于通过变速箱2向作业系统200、行驶系统提供动能;电驱机构包括电机3和用于向电机3供电的动力电池4,电机3用于通过变速箱2向作业系统200、行驶系统提供动能;主控制器被配置为:
获取模式指令和操作指令,模式指令包括电驱参与指令和常规驱动指令,操作指令包括行驶指令和作业指令;
获取到电驱参与指令和行驶指令的情况下,控制发动机1向行驶系统提供动能,保持变速箱2和作业系统200脱开并获取行驶系统的实时行驶工况和发动机1的实时运行状态;
根据实时行驶工况控制行驶系统向动力电池4蓄电,根据实时运行状态控制电机3向行驶系统提供动能。
可以理解地,本实施例中的工程机械可为起重机、挖掘机、打桩机、混凝土机械车等工程机械,作业系统200可为工程机械的上装液压系统。工程机械还包括模式输入器和操作输入器,操作人员可通过模式输入器和操作输入器输入模式指令和操作指令。模式输入器和操作输入器均可采用操作按钮,主控制器可采用PLC控制器,电机3通过变速箱2的传动比为1~5。
在对本实施例中的动力控制系统100进行装配时,可先将油驱机构、电驱机构均和主控制器电连接,需要动力控制系统100进行动力控制时,可通过主控制器获取模式指令和操作指令,在主控制器获取到电驱参与指令和行驶指令的情况下,主控制器可控制发动机1通过变速箱2向行驶系统提供动能,保持变速箱2和作业系统200脱开,主控制器同时获取行驶系统的实时行驶工况和发动机1的实时运行状态,可根据实时行驶工况控制行驶系统向动力电池4蓄电,实现行驶系统的能量回收,同时可根据实时运行状态控制电机3通过变速箱2向行驶系统提供动能,电机3能通过变速箱2进行增扭,发动机1和电机3共同向行驶系统提供动能,实现行驶状态动力叠加,可避免动力不足的情况。本实施例中通过发动机1和电机3供用同一个变速箱2,结合行驶系统的实时行驶工况和发动机1的实时运行状态控制行驶系统向动力电池4进行存储电能、电机3配合发动机1共同向行驶系统提供功能,能自动能量回收的同时还能避免动力不足的情况。
如图3所示,在一实施例中,主控制器被进一步配置为:
获取到电驱参与指令和作业指令的情况下,控制电机3向作业系统200提供动能,保持变速箱2和行驶系统脱开并关停发动机1。
本实施例中的主控制器在接收到电驱参与指令和作业指令的情况下,可控制电机3通过变速箱2向作业系统200提供动能,使作业系统200可实现电机3驱动,且通过变速箱2降速后能使电机3特性与作业系统200的液压系统更好匹配。同时使变速箱2和行驶系统脱开、发动机1关停,能保证动力精确传输,避免能量浪费的情况。
如图5所示,在另一实施例中,根据实时运行状态控制电机3向行驶系统提供动能包括:
根据实时运行状态获取发动机1的油门开度和发动机1的实时负荷率;
在油门全开且实时负荷率大于预设负荷率的情况下,控制电机3向行驶系统提供动能。
本实施例中具体通过油门开度和发动机1的实时负荷率进行动力叠加,能充分实现能量利用,避免能源浪费的情况,同时还能避免动力不足的情况,提高了动力控制系统100的控制精确性。在一实施例中,预设负荷率为百分之九十,在油门全开且实时负荷率大于百分之九十的情况下,主控制器控制电机3向行驶系统提供动能。
如图4所示,具体地,根据实时行驶工况控制行驶系统向动力电池4蓄电包括:
在实时行驶工况处于缓速工况或制动工况的情况下,控制行驶系统向动力电池4蓄电。
本实施例中,具体在实时行驶工况处于缓速工况或制动工况进行能量回收,能精确根据行驶系统的行驶工况进行能量回收,提高了能量回收的精确性。
需要说明的是,主控制器被进一步配置为:
获取到常规驱动指令和作业指令的情况下,控制发动机1向作业系统200提供动能,保持变速箱2和行驶系统脱开并关停电机3;
获取到常规驱动指令和行驶指令的情况下,控制发动机1向行驶系统提供动能,保持变速箱2和作业系统200脱开并关停电机3。
本实施例中的主控制器在获取到常规驱动指令的情况下,可控制发动机1通过变速箱2为作业系统200或行驶系统提供动能,并保持电机3处于关停状态,主控制器在获取到电驱参与指令和作业指令的情况下,可控制电机3通过变速箱2向作业系统200提供动能,实现燃油驱动和电驱动的切换,使作业系统200既能单纯油动,也能单纯电动。在电能不足的情况下,可采用纯油驱动的方式,控制发动机1向行驶系统提供动能,进一步避免动力不足情况,同时提高了动力控制系统100的使用安全性,避免了因电能不足而导致机械故障的情况。
如图1至图5所示,在一实施例中,动力控制系统100还包括两个功率输出器5,变速箱2用于通过其中一个功率输出器5连接作业系统200,变速箱2用于通过另一个功率输出器5连接电机3,主控制器被进一步配置为:
根据模式指令和操作指令,脱开或连接两个功率输出器5和变速箱2。
本实施例中的功率输出器5可采用取力器,两个功率输出器5可沿工程机械的宽度方向分别设置于变速箱2的左右两侧。变速箱2设置有一个主传动输出接口、用于和两个功率输出器5连接的两个取力接口,变速箱2的三处接口均有独立的结合/分离装置,可分别实现与变速箱2的结合/分离。主传动输出接口位于两个取力接口之间,并用于和行驶系统连接。发动机1、变速箱2、电机3可沿工程机械的长度方向依次设置,发动机1位于前端,变速箱2位于发动机1和电机3之间,可方便电机3的安装和布置,为电机3和动力电池4提供足够的安装空间。具体地,在获取到电驱参与指令和行驶指令的情况下,主控制器能通过功率输出器5脱开作业系统200和变速箱2,在获取到电驱参与指令和作业指令的情况下,主控制器能通过功率输出器5脱开行驶系统和变速箱2。本实施例具体通过主控制器控制两个功率输出器5实现行驶工况和作业工况的切换,结构简单且便于安装。
在本发明实施例中,发动机1和变速箱2之间设置有调节器,主控制器被进一步配置为:
在发动机1处于关停状态情况下,控制调节器保持发动机1和变速箱2脱开;
在发动机1处于工作状态情况下,控制调节器保持发动机1和变速箱2连接。
本实施例中的调节器可采用离合器、结合套等结合/分离装置。本实施例中在发动机1关停的情况下,主控制器可通过调节器使变速箱2和发动机1脱开,避免动能反向传输导致结构损坏和能量浪费的情况。在主控制器获取到行驶指令或常规驱动指令的情况下,可启动发动机1,在获取到电驱参与指令和作业指令的情况下,可关停发动机1。
在另一实施例中,电驱机构还包括电源模块,电源模块用于连接外接电源和电机3。并且本实施例中的动力电池4和电机3之间连接有次控制器10,次控制器10和主控制器电连接,且次控制器10能通过CAN线与整车通讯。作业系统200工作可实现外接电源驱动,使用成本低,接电工况降低成本,本实施例中的电源模块可代替动力电池4。在其他实施例中动力电池4和电源模块并联连接电机3,电机3能通过电源模块连接外接电源,也能通过动力电池4向电机3供电。
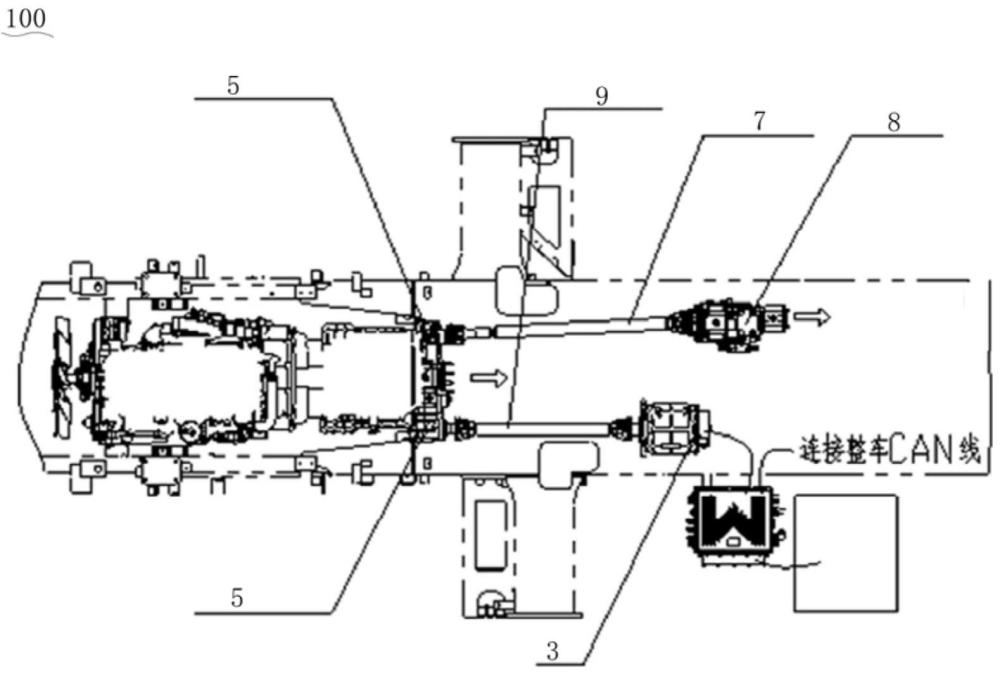
如图1、图2和图4所示,动力控制系统100还包括用于连接行驶系统和变速箱2的行驶传动轴6,主控制器被进一步配置为:
获取到行驶指令的情况下,控制行驶传动轴6和变速箱2连接;
获取到作业指令的情况下,控制行驶传动轴6和变速箱2脱开。
本实施例中的行驶传动轴6可与变速箱2的主传动输出接口连接,具体通过变速箱2和行驶传动轴6脱开、连接,实现变速箱2和行驶系统之间的动能传递的通断,提高了控制便利性。本实施例中的行驶系统带有驱动桥,行驶传动轴6可与驱动桥连接,动力控制系统100还包括油泵总成8、油泵传动轴7、电机传动轴9,油泵传动轴7和电机传动轴9沿工程机械的长度方向延伸,油泵传动轴7连接于油泵总成8和变速箱2之间。油泵总成8用于向作业系统200提供动能,电机传动轴9用于连接电机3和变速箱2。
本发明还提出一种工程机械,工程机械包括作业系统200、行驶系统和如上的动力控制系统100,该动力控制系统100的具体结构参照上述实施例,由于工程机械采用了上述所有实施例的全部技术方案,因此至少具有上述实施例的技术方案所带来的所有有益效果,在此不再一一赘述。
在本发明的描述中,需要理解的是,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。在本发明的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。
在本发明中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接或彼此可通讯;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系,除非另有明确的限定。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。
尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。
- 动力系统的控制方法、控制系统及工程机械
- 动力系统的控制方法、控制系统及工程机械
- 用于工程机械的控制系统、方法及工程机械
- 用于工程机械的控制系统、方法及工程机械
- 动力系统的控制方法、动力系统的控制系统及工程机械
- 混合动力工程机械动力控制系统、控制器及控制方法