一种用于电力维修爬梯的稳定器
文献发布时间:2024-01-17 01:15:20
技术领域
本发明涉及一种用于电力维修爬梯的稳定器,属电力维修辅助设备技术领域。
背景技术
电力维修梯是进行登高检修工作时常用的辅助设备,便于维修人员对高处的电力设备进行检修,检修过程中,通常会将电力维修梯斜靠在电线杆或其他支撑物上,由于电线杆呈圆柱形,电力维修梯顶部斜靠在电线杆上时,与电线杆的接触面较小,电力维修梯在维修人员攀爬的过程中容易发生晃动,严重时电力维修梯与电线杆发生相对滑动,导致电力维修梯倾斜与电线杆分离,维修人员发生坠落,造成安全事故。
为了避免电力维修梯与电线杆滑脱,导致维修人员出现安全事故的问题,现有的防坠落电力维修梯通常是在顶部设置有绑带,通过绑带使电力维修梯的顶部与电线杆进行捆绑固定,避免维修梯顶部脱离电线杆,但这种方式需要维修人员先爬至维修梯的顶部进行捆绑操作,其在攀爬过程中维修梯与电线杆脱离的安全隐患并未得到解决。因此,有必要对其进行改进。
发明内容
本发明的目的在于,提供一种使用方便,可在维修人员攀爬过程中逐步对电线杆进行箍紧,以解决现有电力维修梯在攀爬过程中与电线杆之间存有脱离风险问题的用于电力维修爬梯的稳定器。
本发明的技术方案是:
一种用于电力维修爬梯的稳定器,包括安装基板、箍紧臂、安装筒、加强连板和抵触压板;其特征在于:安装基板呈对称间隔设置,安装基板之间通过加强连板连接,加强连板一侧的安装基板底部设置有安装筒,用于在爬梯顶部的安装,安装基板的上表面设置有滑槽;滑槽内滑动安装有抵触压板;抵触压板一侧的安装基板上通过扭簧活动安装有转轴,转轴上固装有箍紧臂,箍紧臂一侧的转轴上固装有联动板,抵触压板与联动板滑动接触连接,以带动联动板以转轴为轴心发生转动,实现箍紧臂的箍紧目的。
所述的安装基板呈T字形。
所述的箍紧臂呈弯弧形。
所述的滑槽小于联动板长度,以保证抵触压板与联动板之间的始终接触状态。
所述的抵触压板中部呈弧形,抵触压板两端的底部与滑槽对应设置有滑块。
所述的滑块上方的抵触压板一侧通过装配块活动安装有滚轮。
所述的联动板上与滚轮对应设置有工形槽。
所述的安装筒由环套和固定杆构成,环套的圆周上均布有固定杆,固定杆顶部与安装基板固定连接。
本发明的有益效果在于:
该用于电力维修爬梯的稳定器通过安装筒套装在电力维修爬梯的顶端,工作时将抵触压板斜靠在电线杆上,维修人员向上攀爬时,在电力维修爬梯和维修人员的重力作用下,抵触压板在安装基板上发生滑动,从而推动联动板以转轴为轴心发生周向转动,使箍紧臂对电线杆进行箍紧,随着维修人员的逐渐上行,箍紧臂对电线杆箍紧的抱合力逐渐增大,解决了现有电力维修梯在攀爬过程中与电线杆之间存有脱离风险的问题。
附图说明
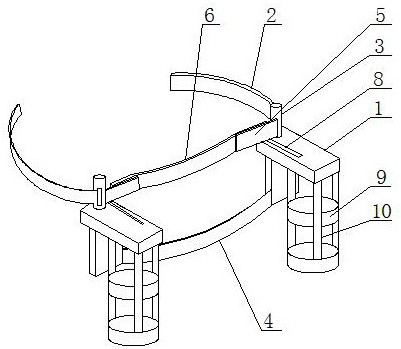
图1为本发明的立体结构示意图;
图2为本发明工作中的结构示意图;
图3为本发明的抵触压板的结构示意图;
图4为本发明的联动板的结构示意图;
图5为图4中的A—A向截面示意图。
图中:1、安装基板;2、箍紧臂;3、转轴;4、加强连板;5、联动板;6、抵触压板;7、滑块;8、滑槽;9、环套;10、固定杆;11、装配块;12、滚轮。
具体实施方式
该用于电力维修爬梯的稳定器包括安装基板1、箍紧臂2、安装筒、加强连板4和抵触压板6;安装基板1呈T字形,安装基板1呈对称间隔设置,安装基板1之间的间距与电力维修爬梯顶部的距离对应,安装基板1之间通过加强连板4连接,加强连板4一侧的安装基板1底部设置有安装筒,安装筒由环套9和固定杆10构成,环套9呈上下间隔状设置,以提高环套9与维修爬梯连接的稳定性,环套9的直径与电力维修爬梯竖杆的直径相应,便于环套9套装在电力维修爬梯的竖杆上,环套9的圆周上呈120°间隔状设置有固定杆10,固定杆10的顶部与安装基板1固定连接,通过安装筒将该稳定器套装在电力维修爬梯的顶部。
安装基板1的上表面设置有滑槽8,滑槽8内滑动设置有抵触压板6,抵触压板6的中部呈弧形,以增大抵触压板6与电线杆之间的接触面积,提高抵触压板6与电线杆之间连接的稳定性,避免抵触压板6与电线杆发生相对滑动。
抵触压板6两端的底部与滑槽8对应设置有滑块7,抵触压板6与安装基板1之间通过滑块7与滑槽8的配合滑动连接,工作时,将套装有该稳定器的电力维修爬梯斜靠在电线杆上,抵触压板6先与电线杆抵触,在电线杆的反作用力作用下,抵触压板6通过滑块7与滑槽8的配合在安装基板1上发生滑动。
抵触压板6背面的安装基板1上通过扭簧活动安装有转轴3,转轴3上固定安装有箍紧臂2,扭簧的作用是使箍紧臂2具有自动复位的功能,扭簧的最大扭力小于5Kg,以便于箍紧臂2以转轴3为轴心发生周向转动,实现箍紧臂2对电线杆箍紧的目的,箍紧臂2一侧的转轴上固定安装有联动板5,抵触压板6的在滑槽内的滑动行程小于联动板5的长度,以保证抵触压板6与联动板5之间的始终接触状态,工作时,抵触压板6在安装基板1上发生滑动,抵触压板6推动两侧的联动板5,使联动板5以转轴3为轴心发生周向转动(周向转动的转动角度小于90),从而使箍紧臂2发生周向转动对电线杆进行抱合箍紧。
该稳定器在使用时,维修人员先通过安装筒将该稳定器套装在电力维修爬梯的顶端,然后将电力维修爬梯斜靠在电线杆上,使抵触压板6与电线杆接触,由于维修爬梯在使用过程中呈倾斜状倚靠在电杆上,加强连板4在倾斜角度的作用下不与电线杆接触,当维修人员通过电力维修爬梯向上攀爬时,维修人员的身体重力(重量)转换成抵触压板6对电线杆水平方向的压力,抵触压板6在电线杆的反作用力作用下,通过滑块7与滑槽8的配合在安装基板1上发生滑动(向后)。
抵触压板6滑动的过程中,使联动板5以转轴3为轴心发生周向转动,从而使箍紧臂2发生周向转动对电线杆进行抱合箍紧,在此过程中,转轴3与安装基板1之间的扭簧转动蓄能,随着维修人员的逐渐上行,抵触压板6对电线杆的水平压力也逐渐增大(工作人员爬的越高,抵触压板6对电线杆的水平压力越大,箍紧臂2抱合力也越大),使得抵触压板6在安装基板1上滑动的距离(行程)逐渐增大,箍紧臂2发生周向转动的角度逐渐增大,由此对电线杆抱合箍紧的抱合力逐渐增大,有效的避免了维修人员在攀爬过程中电力维修爬梯与电线杆之间存有脱离风险的问题。
当维修人员的维修工作完成后,沿着电力维修爬梯逐渐下行时,抵触压板6对电线杆的水平推力逐渐减小,箍紧臂2对电线杆抱合箍紧的抱合力逐渐减小,在扭簧的弹力作用下,箍紧臂2逐渐复位,同时,联动板5推动抵触压板6在安装基板1上滑动复位,由此,箍紧臂2与电线杆之间脱离,以便于电力维修爬梯与电线杆分离。
该用于电力维修爬梯的稳定器通过安装筒套装在电力维修爬梯的顶端,工作时将抵触压板6斜靠在电线杆上,维修人员向上攀爬时,在电力维修爬梯和维修人员的重力作用下,抵触压板6在安装基板1上发生滑动,从而推动联动板5以转轴3为轴心发生周向转动,使箍紧臂2对电线杆进行抱合箍紧,并且,随着维修人员的逐渐上行,箍紧臂2对电线杆箍紧的抱合力逐渐增大,解决了现有电力维修梯在攀爬过程中与电线杆之间存有脱离风险的问题。
作为本发明箍紧臂2的安装改进方案,抵触压板6两侧的箍紧臂2在转轴3上呈上下错位状设置,以便于对不同直径的电线杆进行抱合时,箍紧臂2之间不发生干涉。
作为本发明抵触压板6和联动板5滑动接触连接的改进方案,滑块7上方的抵触压板6一侧通过装配块11活动安装有滚轮12,装配块11与抵触压板6活动铰接。与滚轮12对应的联动板5上设置有工形槽,联动板5与抵触压板6之间通过滚轮12和工形槽的配合滑动接触连接,抵触压板6通过滚轮12推动联通板5以转轴3为轴心发生周向转动,周向转动的转动角度小于90°,便于联通板5复位。