一种后架组件焊接工装
文献发布时间:2024-01-17 01:19:37
技术领域
本发明涉及焊接工装的技术领域,特指一种后架组件焊接工装。
背景技术
后架组件是叉车的一个重要部件,后架组件一般包括立板、导轨、轮架固定板以及围板等四个部分,在后架组件制作过程中,一般是通过多个工装对多个组成部件进行定位,一般是需要最少三个焊接工装,一是将导轨焊接至立板上,二是将轮架固定板焊接至立板上,三是将围板焊接至立板上;但是其存在一个较大的问题,需要反复移动零部件,容易导致定位误差,且一个组件的焊接需要多个工装设备,其造成成本的大幅提高。
发明内容
本发明考虑了前述问题而做出,发明的目的是提供一种后架组件焊接工装,可以在一个焊接工装上完成多个部件的焊接,保证定位精度,节约成本,且焊接完全。
为实现上述目的,本发明提供一种后架组件焊接工装,所述后架组件包括立板、导轨、轮架固定板以及围板,所述焊接工装用于将所述导轨、轮架固定板以及所述围板焊接至所述立板上,所述焊接工装包括支撑机构以及设置在所述支撑机构上的定位机构,所述支撑机构包括可翻转的支撑底板,所述定位机构包括用于固定所述立板的第一定位组件、用于将两个所述导轨固定在所述立板相对两侧的第二定位组件、用于将所述轮架固定板固定在所述立板尾端的第三定位组件以及用于将所述围板固定到所述轮架固定板上方的第四定位组件,其中,所述第三定位组件以及所述第四定位组件可移动的设置在所述支撑底板上;
当所述焊接工装用于焊接所述导轨时,所述第三定位组件与所述第四定位组件均可移动至远离所述立板的所述支撑底板的一侧;当所述焊接工装用于焊接所述轮架固定板时,所述第四定位组件可移动至远离所述立板的所述支撑底板的一侧。
据上所述的一种后架组件焊接工装,所述支撑机构还包括主动变位机以及从动变位机,所述主动变位机与所述从动变位机分别位于所述支撑底板对称的两侧;
所述主动变位机包括主支撑架、可转动设置在所述主支撑架上的主动转盘以及由于驱动所述主动转盘转动的主动电机,所述从动变位机包括副支撑架以及可转动设置在所述副支撑架上的从动转盘,所述支撑底板的两侧分别与所述主动转盘以及所述从动转盘相接。
据上所述的一种后架组件焊接工装,所述立板中部的两侧设有通孔;所述第一定位组件包括固定在所述支撑底板上的第一定位气缸、第一夹紧气缸以及第二夹紧气缸,所述第一定位气缸的伸缩轴上设有压板,所述压板与所述立板的前端端面贴合,至少两个所述第一夹紧气缸对称分布在所述立板的前端,且所述第一夹紧气缸的伸缩轴可与所述立板前端的顶部抵接,两个所述第二夹紧气缸通过两个所述通孔设置在所述立板中部的两侧,且所述第二夹紧气缸的伸缩轴可与所述立板中部的顶面抵接。
据上所述的一种后架组件焊接工装,所述立板的前端上设有调节板,所述第一定位组件还包括两个调节螺钉,两个所述调节螺钉对称分布在所述立板前端的所述支撑底板上,且所述调节螺钉的一端与所述调节板螺纹连接。
据上所述的一种后架组件焊接工装,所述第二定位组件包括第三夹紧气缸以及夹紧座,所述第三夹紧气缸固定在所述支撑底板上,并位于所述导轨的一侧,所述第三夹紧气缸的伸缩轴上设有第一夹板,所述第一夹板可与所述导轨的顶部抵接;
所述夹紧座包括与所述导轨外侧抵接的夹座主体以及可与所述导轨内侧抵接的第二夹板,所述第二夹板可转动的设置在所述夹座主体上。
据上所述的一种后架组件焊接工装,还包括驱动机构,所述驱动机构包括用于驱动所述第三定位组件运动的第一驱动组件以及用于驱动所述第四定位组件运动的第二驱动组件。
据上所述的一种后架组件焊接工装,所述第一驱动组件包括两根对称设置在所述支撑底板上的导向轴、可滑动设置在所述导向轴上的第一滑块、与所述第三定位组件底部相接的第一连接板以及固定在所述支撑底板底部的第一驱动气缸,所述导向轴沿所述立板的前后方向布置在所述支撑底板上,所述第一驱动气缸的伸缩轴与所述第一连接板相接。
据上所述的一种后架组件焊接工装,所述轮架固定板包括驱动轮固定板以及设置在所述驱动轮固定板两侧的两个从动轮固定板,所述驱动轮固定板上设有第一安装孔,两个所述从动轮固定板上均设有第二安装孔;
所述第三定位组件包括固定与所述第一滑块相接的第一固定座、分布在所述第一固定座两侧的第一定位凸起、与所述第一固定座相接的第一安装座以及设置在所述第一安装座上的第四夹紧气缸,当所述第三定位组件朝靠近所述轮架固定板一侧运动时,所述第一定位凸起可卡入所述第二安装孔内,所述第四夹紧气缸上的第三夹板可穿过所述第一安装孔,并与所述驱动轮固定板的前端面抵接。
据上所述的一种后架组件焊接工装,所述第二驱动组件包括两个对称设置在所述支撑底板上的滑轨、可滑动的设置在滑轨上的第二滑块、用于与第四定位组件相接的第二连接板以及固定在所述支撑底板底部的第二驱动气缸,所述滑轨沿所述立板的前后方向布置在所述支撑底板上,所述第二驱动气缸与所述第二连接板相接。
据上所述的一种后架组件焊接工装,所述第四定位组件包括位于所述围板上方的校正板以及位于所述围板两侧的挤压轴,所述校正板的两端均通过支撑座与所述滑块相接,且所述校正板上设有用于挤压所述围板顶部的校正螺栓,所述挤压轴可与所述围板的一侧抵接。
本发明具有以下有益效果:在使用焊接工装进行焊接时,利用机械手将立板放置到支撑底板上,通过第一定位组件调整支撑立板的位置,并对立板进行固定定位,在焊接导轨时,将第三定位组件以及第四定位组件移开至远离立板的支撑底板一侧,此时第三定位组件与第四定位组件不会对导轨以及立板的焊接起到干涉作用,在焊接完导轨后,焊接轮架固定板可通过机械手将轮架固定板夹持至预定位置,再将第三定位组件移动将轮架固定板定位,定位后对轮架固定板进行焊接,完成之后,再通过机械手将围板夹持至预设位置,将第四定位组件移至围板的正上方,并对围板进行定位,可以实现在同一焊接工装上实现后架组件的多部件焊接,可以保证定位精度,节约成本,且在焊接过程中,支撑底板可进行翻转动作,可以使得焊接更为全面,焊接强度高。
附图说明
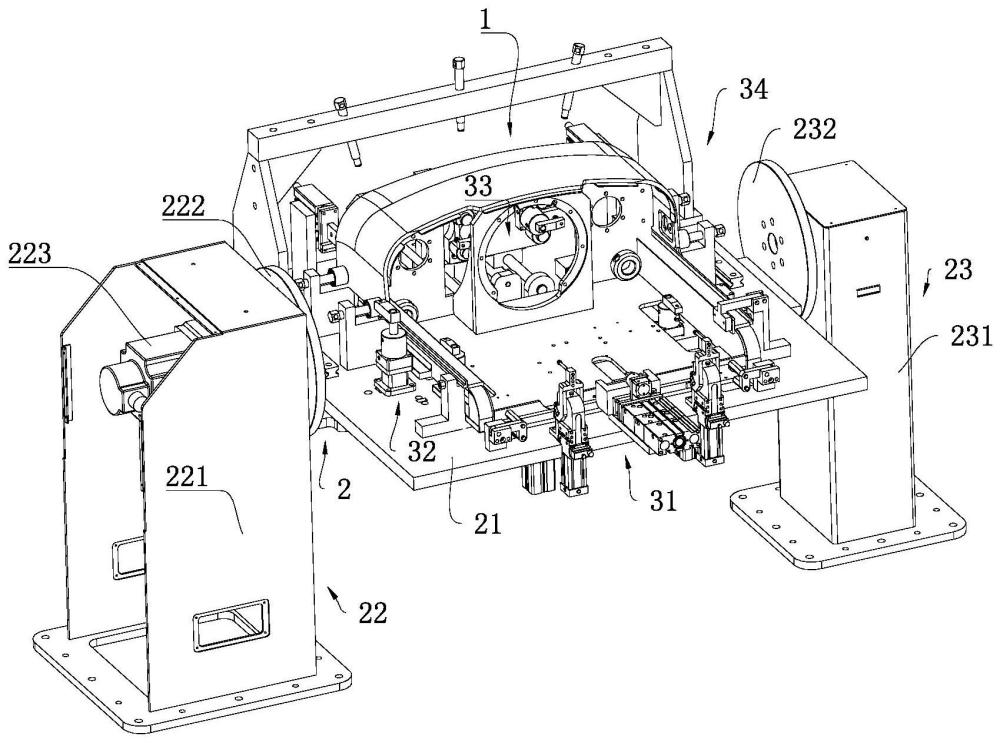
图1是实施例的后架组件与焊接工装装配的整体结构示意图;
图2是实施例的定位机构与支撑底板的装配图;
图3是实施例的驱动机构与定位机构的装配示意图;
图4是实施例的后架组件结构示意图。
图中:
1、后架组件;11、立板;111、调节板;12、导轨;13、轮架固定板;131、驱动轮固定板;131a、第一安装孔;132、从动轮固定板;132a、第二安装孔;14、围板;
2、支撑机构;21、支撑底板;22、主动变位机;221、主支撑架;222、主动转盘;223、主动电机;23、从动变位机;231、副支撑架;232、从动转盘;
3、定位机构;31、第一定位组件;311、第一定位气缸;311a、压板;312、第一夹紧气缸;313、第二夹紧气缸;314、调节螺栓;32、第二定位组件;321、第三夹紧气缸;321a、第一夹板;322、夹紧座;322a、夹座主体;322b、第二夹板;33、第三定位组件;331、第一固定座;332、第一凸起;333、第一安装座;334、第四夹紧气缸;334a、第三夹板;34、第四定位组件;341、校正板;341a、校正螺栓;342、挤压轴;
4、驱动机构;41、第一驱动组件;411、导向轴;412、第一滑块;413、第一连接板;42、第二驱动组件;421、滑轨;422、第二滑块;423、第二连接板;424、第二驱动气缸。
具体实施方式
以下是本发明的具体实施例并结合附图,对本发明的技术方案作进一步的描述,但发明并不限于这些实施例。
如图1-4所示,一种后架组件焊接工装,包括用于提供支撑的支撑机构2、设置在支撑机构2上的定位机构3以及驱动机构4,通过驱动机构4可以驱动定位机构3中的第三定位组件33以及第四定位组件34,在焊接导轨12与立板11时,可以将第三定位组件33以及第四定位组件34移开,可防止第三定位组件33与第四定位组件34与焊接装置干涉,当焊接轮架固定板13时,可将第四定位组件34移开,防止第四定位组件34与焊接装置干涉,起到避让的效果,进而实现在同一焊接工装上,焊接后架组件1的多个部件。
具体的,后架组件1包括立板11、导轨12、轮架固定板13以及围板14,本实施例的焊接工装用于将导轨12、轮架固定板13以及围板14焊接至立板11上,第一步将两个导轨12焊接至立板11的两侧,第二步将轮架固定板13焊接至立板11的尾端,第三步将围板14焊接至立板11的尾端。
具体的,支撑机构2包括可翻转的支撑底板21、主变位机以及从变位机,主动变位机22与从动变位机23分别位于支撑底板21对称的两侧,主动变位机22包括主支撑架221、可转动设置在主支撑架221上的主动转盘222以及由于驱动主动转盘222转动的主动电机223,从动变位机23包括副支撑架231以及可转动设置在副支撑架231上的从动转盘232,支撑底板21的两侧分别与主动转盘222以及从动转盘232相接,在需要调整焊接角度时,主动电机223带动主动转盘222转动,进而驱动支撑底板21转动,从动转盘232也随着一起转动。
进一步的,定位机构3包括用于固定立板11的第一定位组件31、用于将两个导轨12固定在立板11相对两侧的第二定位组件32、用于将轮架固定板13固定在立板11尾端的第三定位组件33以及用于将围板14固定到轮架固定板13上方的第四定位组件34,其中,第三定位组件33以及第四定位组件34可移动的设置在支撑底板21上,当焊接工装用于焊接导轨12时,第三定位组件33与第四定位组件34均可移动至远离立板11的支撑底板21的一侧,当焊接工装用于焊接轮架固定板13时,第四定位组件34可移动至远离立板11的支撑底板21的一侧,即在焊接导轨12的时候,利用第一定位组件31和第二定位组件32将立板11以及导轨12的位置固定住,此时将第三定位组件33和第四定位组件34移开,防止第三定位组件33以及第四定位组件34与焊接装置发生干涉,实现一个避让效果,同理在焊接轮架固定板13时,利用第一定位组件31将立板11固定住,第二定位组件32将导轨12固定住,第三定位组件33将轮架固定板13固定柱,第四定位组件34避让开。
进一步的,在立板11中部的两侧设有通孔,第一定位组件31包括固定在支撑底板21上的第一定位气缸311、第一夹紧气缸312以及第二夹紧气缸313,第一定位气缸311的伸缩轴上设有压板311a,压板311a与立板11的前端端面贴合,至少两个第一夹紧气缸312对称分布在立板11的前端,且第一夹紧气缸312的伸缩轴可与立板11前端的顶部抵接,两个第二夹紧气缸313通过两个通孔设置在立板11中部的两侧,且第二夹紧气缸313的伸缩轴可与立板11中部的顶面抵接,在机械手将立板11放置到支撑底板21上时,先通过第一定位气缸311进行位置的调节,再通过第一夹紧气缸312以及第二夹紧气缸313对立板11进行固定,完成立板11的安装定位。
更进一步的,立板11的前端上设有调节板111,第一定位组件31还包括两个调节螺钉,两个调节螺钉对称分布在立板11前端的支撑底板21上,且调节螺钉的一端与调节板111螺纹连接,在利用第一定位气缸311对立板11进行调节之后,可以再通过两个调节螺钉进行微调,确保立板11的定位精度,从而保证焊接精度。
进一步的,第二定位组件32包括第三夹紧气缸321以及夹紧座322,第三夹紧气缸321固定在支撑底板21上,并位于导轨12的一侧,第三夹紧气缸321的伸缩轴上设有第一夹板321a,第一夹板321a可与导轨12的顶部抵接,夹紧座322包括与导轨12外侧抵接的夹座主体322a以及可与导轨12内侧抵接的第二夹板322b,第二夹板322b可转动的设置在夹座主体322a上,在焊接导轨12之前,利用机械手将导轨12夹持到立板11的两侧,第三夹紧气缸321带动其伸缩轴转动,利用第一夹板321a实现导轨12垂直方向的定位,并利用夹紧座322上的第二夹板322b实现导轨12水平方向的定位,完成对导轨12的定位。
为了实现第三定位组件33以及第四定位组件34的移动,在本实施例中,驱动机构4包括用于驱动第三定位组件33运动的第一驱动组件41以及用于驱动第四定位组件34运动的第二驱动组件42。
具体的,第一驱动组件41包括两根对称设置在支撑底板21上的导向轴411、可滑动设置在导向轴411上的第一滑块412、与第三定位组件33底部相接的第一连接板413以及固定在支撑底板21底部的第一驱动气缸,导向轴411沿立板11的前后方向布置在支撑底板21上,第一驱动气缸的伸缩轴与第一连接板413相接,第一驱动气缸沿立板11的前后方向布置在支撑底板21上,第一驱动气缸通过第一连接板413驱动第三定位组件33沿导向轴411的布置方向运动。
具体的,轮架固定板13包括驱动轮固定板131以及设置在驱动轮固定板131两侧的两个从动轮固定板132,驱动轮固定板131上设有第一安装孔131a,两个从动轮固定板132上均设有第二安装孔132a,第三定位组件33包括固定与第一滑块412相接的第一固定座331、分布在第一固定座331两侧的第一定位凸起、与第一固定座331相接的第一安装座333以及设置在第一安装座333上的第四夹紧气缸334,当第三定位组件33朝靠近轮架固定板13一侧运动时,第一定位凸起可卡入第二安装孔132a内,第四夹紧气缸334上的第三夹板334a可穿过第一安装孔131a,并与驱动轮固定板131的前端面抵接,通过第一定位凸起实现两个从动轮固定板132的定位,并通过第四夹紧气缸334上的第三夹板334a实现驱动轮固定板131,以实现对整个轮架固定板13的夹紧定位,同时由于第一固定座331与第一滑块412相接,可驱动整个第三定位组件33运动,便于调节位置。
具体的,第二驱动组件42包括两个对称设置在支撑底板21上的滑轨421、可滑动的设置在滑轨421上的第二滑块422、用于与第四定位组件34相接的第二连接板423以及固定在支撑底板21底部的第二驱动气缸,滑轨421沿立板11的前后方向布置在支撑底板21上,第二驱动气缸与第二连接板423相接,两个第二驱动气缸分别通过两个第二连接板423带动第四定位组件34的两端沿滑轨421布置方向移动。
进一步的,围板14位于轮架固定板13的上方,在固定围板14时,需要从上方以及两侧进行固定,因此第四定位组件34包括位于围板14上方的校正板341以及位于围板14两侧的挤压轴342,校正板341的两端均通过支撑座与滑块相接,且校正板341上设有用于挤压围板14顶部的校正螺栓341a,挤压轴342可与围板14的一侧抵接,在校正板341通过支撑座移动至围板14上方时,可手拧校正螺栓341a对围板14的顶部位置进行校正,并通过两个挤压轴342对围板14进行夹持固定。
以上结合附图对本发明的技术方案进行了详细的阐述,所描述的实施例用于帮助理解本发明的思想。本文中所描述的具体实施例仅仅是对本发明精神作举例说明。发明所属技术领域的技术人员可以对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,但并不会偏离本发明的精神或者超越所附权利要求书所定义的范围。
需要说明,本发明实施例中所有方向性指示(诸如上、下、左、右、前、后……)仅用于解释在某一特定姿态(如附图所示)下各部件之间的相对位置关系、运动情况等,如果该特定姿态发生改变时,则该方向性指示也相应地随之改变。
另外,在本发明中如涉及“第一”、“第二”、“一”等的描述仅用于描述目的,而不能理解为指示或暗示其相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。在本发明的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。
在本发明中,除非另有明确的规定和限定,术语“连接”、“固定”等应做广义理解,例如,“固定”可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系,除非另有明确的限定。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
另外,本发明各个实施例之间的技术方案可以相互结合,但是必须是以本领域普通技术人员能够实现为基础,当技术方案的结合出现相互矛盾或无法实现时应当认为这种技术方案的结合不存在,也不在本发明要求的保护范围之内。