一种全地形升降激波靶机
文献发布时间:2024-01-17 01:19:37
技术领域
本发明涉及打靶机技术领域,特别涉及一种全地形升降激波靶机。
背景技术
在现在的射击运动和训练中,经常需要在射击人员命中靶机的同时将射击成绩及时地在显示设备上同步显示出来,并且在射手射击完毕后,对其成绩进行相应的数据统计和数据分。
上述存在的弊端:
1、传统的移动式靶机当中,需要进行铺设轨道,再将靶机等设备安装在轨道上,前期基建工作繁琐,并且对于轨道的铺设等,也是尺寸要求极为严格,在安装结束后,导致靶机在导轨上进行运作,当需要将其更换场所时,需要重新拆卸安装,导致浪费大量人力。
2、传统的靶机在户外进行安装时,当遇到拥有坡和低洼的地区时,轨道将会因为坡度较大的原因导致无法铺设,从而设置的靶机无法移动,导致使用者打的靶全是固定靶,缺少了挑战性。
发明内容
本发明的目的在于提供一种全地形升降激波靶机,以解决上述背景技术中提出的问题。
为实现上述目的,本发明提供如下技术方案:一种全地形升降激波靶机,包括负载靶面和外壳体总成,所述负载靶面设置于外壳体总成的顶部:
所述负载靶面的底部设置有伸缩组件,所述伸缩组件用于将负载靶面的高度进行调节,所述伸缩组件包括山形支架和电动伸缩杆;
所述外壳体总成的一侧设置有前桥总成,用于将外壳体总成进行转向和爬坡,所述前桥总成包括两个第一轮毂框架、两个第二轮毂框架、多个行星轮和支撑轴承、第一连杆、齿形连杆和两个前桥主轴;
所述外壳体总成的另一侧设置有后桥总成,用于将外壳体总成进行爬坡,所述后桥总成包括两个展开电机、后桥主轴、多个转开半轮、多个传动拉杆、两个驱动盘和两个转盘。
优选的,所述外壳体总成底端的内壁设置有蓄电池总成,所述蓄电池总成的一侧设置有控制电路总成。
优选的,所述外壳体总成底端的内壁设置有转向电机总成,所述齿形连杆的底部开设有齿牙,所述转向电机总成的输出端与齿牙啮合。
优选的,所述外壳体总成底端的内壁设置有驱动电机,所述驱动电机的输出端设置有传动总成,所述后桥主轴设置于传动总成的一侧。
优选的,所述山形支架固定连接于所述负载靶面的底部,所述电动伸缩杆固定连接于外壳体总成底端的内壁,所述电动伸缩杆的中部穿插连接于外壳体总成的顶部,所述山形支架底部的中部滑动套设于电动伸缩杆的中部,所述电动伸缩杆的输出端固定连接在负载靶面的底端。
优选的,所述外壳体总成一侧的内壁设置有两个带座轴承,两个所述带座轴承均套设于前桥主轴的中部,所述前桥主轴转动穿插连接于外壳体总成的一侧,所述后桥主轴转动穿插连接在外壳体总成的另一侧。
优选的,两个所述支撑轴承的一侧分别铰接在齿形连杆的两端,两个所述支撑轴承的另一侧分别铰接在第一连杆的两端,所述前桥主轴的两侧分别穿插设置于与两个支撑轴承的中部。
优选的,多个所述行星轮分为两组,两个所述前桥主轴的一侧均设置有第二轮毂框架,两个所述第二轮毂框架的一侧均转动设置有一组行星轮,两组所述行星轮的一侧均设置有第一轮毂框架。
优选的,两个所述驱动盘分别固定连接在后桥主轴的两端,两个所述后桥主轴的一侧均固定连接有展开电机,两个所述展开电机的输出端均固定连接有转盘。
优选的,多个所述转开半轮的一侧均设置有支撑架,两个所述驱动盘的一侧均设置有多个定位杆,多个所述支撑架分别转动套接在多个定位杆的中部,多个所述传动拉杆分别设置在两个转盘的一侧,多个所述传动拉杆的一端分别转动穿插连接在多个支撑架的一侧,两个所述转开半轮的一侧均开设有多个限位孔,多个所述传动拉杆的一端分别滑动穿插连接在多个限位孔的中部。
本发明的技术效果和优点:
(1)该全地形升降激波靶机,在原有的基础上增加了伸缩组件、前桥总成、后桥总成,通过驱动电机将后桥总成中的后桥主轴进行转动,后桥主轴带动两侧的转开半轮进行转动,从而使外壳体总成通过转开半轮的咋混动进行移动,从而使负载靶面通过底部的外壳体总成进行移动,从而在进行更换场地时,通过前桥总成和后桥总成将其进行移动。
(2)该全地形升降激波靶机,在全地形靶车爬坡或者爬楼梯的时候,由于受到前方坡道、楼梯等障碍物的阻挡,前导向行星轮无法正常向前进行运动,这时后轮驱动提供的向前推力使前导向行星轮产生转动,转动时,悬空的轮胎再次接触地面时,正好会越过行星轮前方的障碍,所以实现全地形运行。
(3)该全地形升降激波靶机,展开电机安装在驱动盘上,与驱动盘为相对静止状态,打开展开电机,展开电机将转盘进行转动,转盘带动传动拉杆进行转动,传动拉杆带动三个支撑架的一端进行移动,支撑架通过三个定位杆转动连接在驱动盘上,当转盘带动传动拉杆和支撑架的一端进行移动,支撑架的中部被固定,这样就可以实现支撑架进行转动,从而将后轮进行展开,从而驱动总成向后轮提供的向前推力进行转动,转动时,悬空的转开半轮再次接触地面时,正好会越过转开半轮前方的障碍,所以实现全地形运行。
附图说明
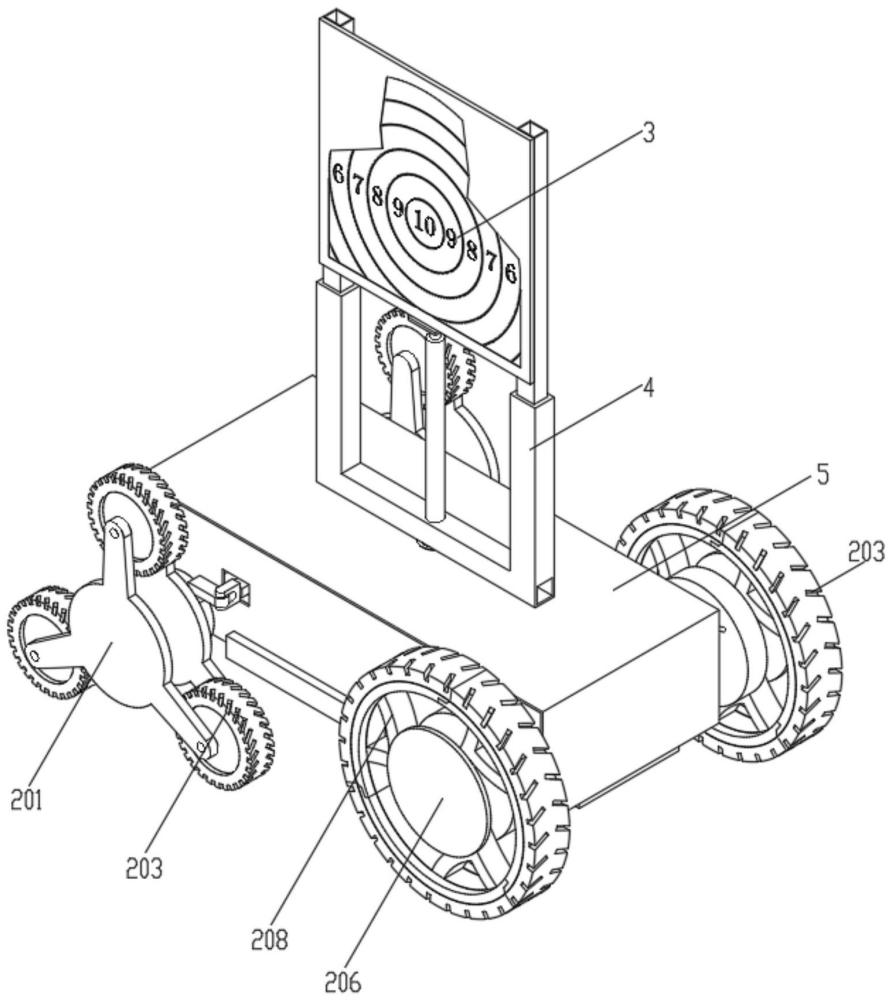
图1为本发明结构示意图。
图2为本发明结构示意图。
图3为本发明顶面透视结构示意图。
图4为本发明后桥结构示意图。
图5为本发明部分正视结构示意图。
图6为本发明前桥侧面结构示意图。
图7为本发明前桥结构示意图。
图中:1、前桥总成;101、第一轮毂框架;102、第二轮毂框架;103、行星轮;104、支撑轴承;105、第一连杆;106、齿形连杆;107、前桥主轴;2、后桥总成;201、展开电机;202、后桥主轴;203、转开半轮;204、传动拉杆;205、驱动盘;206、转盘;207、定位杆;208、支撑架;3、负载靶面;4、山形支架;5、外壳体总成;6、带座轴承;7、转向电机总成;8、蓄电池总成;9、电动伸缩杆;10、控制电路总成;11、驱动电机;12、传动总成。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
本发明提供了如图1-7所示的一种全地形升降激波靶机,包括负载靶面3和外壳体总成5,负载靶面3设置于外壳体总成5的顶部:
负载靶面3的底部设置有伸缩组件,伸缩组件用于将负载靶面3的高度进行调节,伸缩组件包括山形支架4和电动伸缩杆9;
外壳体总成5的一侧设置有前桥总成1,用于将外壳体总成5进行转向和爬坡,前桥总成1包括两个第一轮毂框架101、两个第二轮毂框架102、多个行星轮103和支撑轴承104、第一连杆105、齿形连杆106和两个前桥主轴107;
外壳体总成5的另一侧设置有后桥总成2,用于将外壳体总成5进行爬坡,后桥总成2包括两个展开电机201、后桥主轴202、多个转开半轮203、多个传动拉杆204、两个驱动盘205和两个转盘206,打开展开电机201,展开电机201将转盘206进行转动,转盘206带动传动拉杆204进行转动,传动拉杆204带动三个支撑架208的一端进行移动,支撑架208通过三个定位杆207转动连接在驱动盘205上,当转盘206带动传动拉杆204和支撑架208的一端进行移动,支撑架208的中部被固定,这样就可以实现支撑架208进行转动,从而将后轮进行展开。
外壳体总成5底端的内壁设置有蓄电池总成8,蓄电池总成8的一侧设置有控制电路总成10,设置蓄电池总成8实现将装置提供电力,设置的蓄电池总成8分别与转向电机总成7、电动伸缩杆9、控制电路总成10、驱动电机11和展开电机201电性连接,蓄电池总成8为转向电机总成7、电动伸缩杆9、控制电路总成10、驱动电机11和展开电机201提供电力,设置的多个电机由控制电路总成10中的主控板统一进行控制,主控板的运行信号来自控制器,即多个电机由控制器进行控制。控制器和主控板采用无线连接的方式。在进行射击训练时,全地形移动升降靶机可预先进行轨道设计,自动运行,也可由人为操作,进行运行。
外壳体总成5底端的内壁设置有转向电机总成7,齿形连杆106的底部开设有齿牙,转向电机总成7的输出端与齿牙啮合,转向电机总成7的输出端与齿形连杆106进行连接,转向电机总成7转动通过齿轮带动齿形连杆106进行左右方向平移运动的同时,齿形连杆106推动前转向行星轮103进行左右转动,来实现车辆转向。
外壳体总成5底端的内壁设置有驱动电机11,驱动电机11的输出端设置有传动总成12,后桥主轴202设置于传动总成12的一侧,此设置实现了通过驱动电机11带动传动总成12和后桥主轴202进行转动,从而后轮通过后桥主轴202的转动而转动,从而将装置进行带动。
山形支架4固定连接于负载靶面3的底部,电动伸缩杆9固定连接于外壳体总成5底端的内壁,电动伸缩杆9的中部穿插连接于外壳体总成5的顶部,山形支架4底部的中部滑动套设于电动伸缩杆9的中部,电动伸缩杆9的输出端固定连接在负载靶面3的底端,电动伸缩杆9伸开后,支撑靶杆上升,完成靶面的升起动作,同理,在电动伸缩杆9收缩的时候,完成靶面的降靶动作。
外壳体总成5一侧的内壁设置有两个带座轴承6,两个带座轴承6均套设于前桥主轴107的中部,前桥主轴107转动穿插连接于外壳体总成5的一侧,后桥主轴202转动穿插连接在外壳体总成5的另一侧。
两个支撑轴承104的一侧分别铰接在齿形连杆106的两端,两个支撑轴承104的另一侧分别铰接在第一连杆105的两端,前桥主轴107的两侧分别穿插设置于与两个支撑轴承104的中部。
多个行星轮103分为两组,两个前桥主轴107的一侧均设置有第二轮毂框架102,两个第二轮毂框架102的一侧均转动设置有一组行星轮103,两组行星轮103的一侧均设置有第一轮毂框架101,通过两个轮毂框架将多个行星轮103的位置进行固定,从而使后轮驱动提供的向前推力使前导向行星轮103产生转动,转动时,悬空的轮胎再次接触地面时,正好会越过导向行星轮103前方的障碍。
两个驱动盘205分别固定连接在后桥主轴202的两端,两个后桥主轴202的一侧均固定连接有展开电机201,两个展开电机201的输出端均固定连接有转盘206。
多个转开半轮203的一侧均设置有支撑架208,两个驱动盘205的一侧均设置有多个定位杆207,多个支撑架208分别转动套接在多个定位杆207的中部,多个传动拉杆204分别设置在两个转盘206的一侧,多个传动拉杆204的一端分别转动穿插连接在多个支撑架208的一侧,两个转开半轮203的一侧均开设有多个限位孔,多个传动拉杆204的一端分别滑动穿插连接在多个限位孔的中部,通过定位杆207将支撑架208进行固定。
本发明工作原理:
首先,负载靶面3通过底部的外壳体总成5两侧的前桥总成1和后桥总成2进行移动,将装置移动到射击训练场所,再通过电动伸缩杆9将负载靶面3进行升降;
其次,在平整的路面上,行星轮103的两个轮子接触地面,受后轮推力的作用转动,向前行驶;如果遇到障碍,无法前进,受到后轮推力的影响,行星轮103中间与前轮支撑轴承104连接的轴承就会发生转动,这样就行星轮103整体就会转动,迫使之前在上边的轮子就会向前运动并且接触地面,这样就实现了翻越障碍的功能;
最后,在行星轮103跨越障碍后打开展开电机201,展开电机201将转盘206进行转动,转盘206带动传动拉杆204进行转动,传动拉杆204带动三个支撑架208的一端进行移动,三个支撑架208通过三个定位杆207转动连接在驱动盘205上,当转盘206带动传动拉杆204和支撑架208的一端进行移动,支撑架208的中部被固定,这样就可以实现支撑架208进行转动,从而将后轮进行展开,从而驱动电机11向后轮提供的向前推力进行转动,转动时,悬空的转开半轮203再次接触地面时,正好会越过转开半轮203前方的障碍。
最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,凡在本发明的精神和原则之内,做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。