带外部控制负反馈调节功能的线性软启动控制方法及系统
文献发布时间:2024-01-17 01:21:27
技术领域
本发明涉及软启动控制技术领域,尤其涉及一种带外部控制负反馈调节功能的线性软启动控制方法及系统。
背景技术
在电力电子技术及自动控制领域,经常需要使用软启动功能,最常见的软启动控制方法为线性软启动及线性软关功能。由于负载特性及控制精度的影响,经常导致软启动过程中,实际输出并不是线性的,而是存在一定的偏差。一般的软启动装置内部控制没有负载信号的反馈控制功能。其内部控制器的算法可以进行预测反馈功能,例如,公开号为CN108134541A的中国专利公开的一种异步电机软启动器及在其基础上的预测反馈控制方法即是这种内部控制器的算法,但这种控制算法复杂且不能做到真正的负载端输出信号的反馈控制功能,并不能真正实现装置的线性准确输出。
发明内容
为了解决背景技术中的技术问题,本发明提供了一种带外部控制负反馈调节功能的线性软启动控制方法及系统,由软启动装置的外部控制器实现,反馈信号的比较量为软启动对象的输出端信号,通过设定的控制方法实现软启动及软关过程更加线性、准时,实际输出斜坡与设定斜坡一致。
为了达到上述目的,本发明采用以下技术方案实现:
一种带外部控制负反馈调节功能的线性软启动控制方法,所述的控制方法由软启动装置的外部控制器实现,反馈信号的比较量为软启动对象的输出端信号,所述的控制方法包括如下:
1)软启动阶段:外部控制器按照设定的启动斜坡进行软启动,通过引入负反馈控制,实现启动过程负载呈线性输出,与设定的启动斜坡的斜率和软启动时间相同,软启动阶段负反馈控制方法如下:
外部控制器的控制程序为固定时间周期执行一次,软启动开始前,系统设定稳定运行时的给定值i
x
每个软启程序执行周期,外部控制器对反馈信号的比较量i
i
i
当反馈的比较量i
2)稳定运行阶段:外部控制器按照设定的输出值,通过负反馈方式控制输出稳定,稳定运行阶段负反馈控制方法如下:
外部控制器的控制程序为固定时间周期执行一次;系统设定反馈信号的比较量i
x
每个程序执行周期内,外部控制器对反馈的比较量i
i
每个调节程序执行周期内,所述的偏差调节程序的调节量i
i
当i
3)软关阶段:外部控制器按照设定的关断斜坡进行软关,通过引入负反馈控制,实现关断过程负载输出呈线性,与设定的关断斜坡的斜率和软关时间相同;软关阶段负反馈控制方法如下:
外部控制器的控制程序为固定时间周期执行一次;软关开始时,外部控制器根据软关时间t
x
每执行一个程序周期,外部控制器对反馈信号的比较量i
I
I
当反馈的比较量i
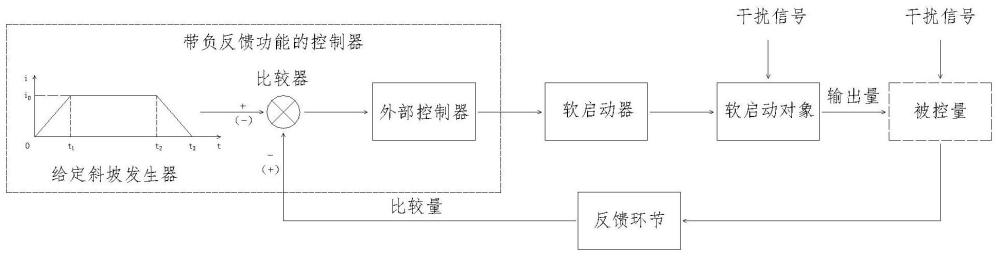
所述的一种带外部控制负反馈调节功能的线性软启动控制方法的系统,包括软启动装置、外部控制器和软启动对象;所述的外部控制器是具有负反馈功能的控制器,其集成了斜坡发生器、比较器和控制器的全部功能,所述的外部控制器输出控制信号至软启动装置,所述的软启动装置对软启动对象进行驱动,同时软启动对象的输出信号作为被控量经由反馈环节输入至外部控制器,作为外部控制器负反馈功能的比较量,外部控制器内运行所述的一种带外部控制负反馈调节功能的线性软启动控制方法。
与现有技术相比,本发明的有益效果是:
本发明提供了一种带外部控制负反馈调节功能的线性软启动控制方法,由软启动装置的外部控制器实现,反馈信号的比较量为软启动对象的输出端信号,控制方法与常规控制方法不同,通过设定的控制方法实现软启动及软关过程更加线性、准时,实际输出斜坡与设定斜坡一致。
附图说明
图1为本发明实施例的系统结构图;
图2为发明实施例的实际输出曲线的效果截图一;
图3为发明实施例的实际输出曲线的效果截图二。
具体实施方式
下面结合附图对本发明的具体实施方式作进一步说明:
一种带外部控制负反馈调节功能的线性软启动控制方法,所述的控制方法由软启动装置的外部控制器实现,反馈信号的比较量为软启动对象的输出端信号。
所述的控制方法包括如下:
1)软启动阶段:外部控制器按照设定的启动斜坡进行软启动,通过引入负反馈控制,实现启动过程负载呈线性输出,与设定的启动斜坡的斜率和软启动时间相同,软启动阶段负反馈控制方法如下:
外部控制器的控制程序为固定时间周期执行一次,软启动开始前,系统设定稳定运行时的给定值i
x
每个软启程序执行周期,外部控制器对反馈信号的比较量i
i
i
当反馈的比较量i
2)稳定运行阶段:外部控制器按照设定的输出值,通过负反馈方式控制输出稳定,稳定运行阶段负反馈控制方法如下:
外部控制器的控制程序为固定时间周期执行一次;系统设定反馈信号的比较量i
x
每个程序执行周期内,外部控制器对反馈的比较量i
i
每个调节程序执行周期内,所述的偏差调节程序的调节量i
i
当i
3)软关阶段:外部控制器按照设定的关断斜坡进行软关,通过引入负反馈控制,实现关断过程负载输出呈线性,与设定的关断斜坡的斜率和软关时间相同;软关阶段负反馈控制方法如下:
外部控制器的控制程序为固定时间周期执行一次;软关开始时,外部控制器根据软关时间t
x
每执行一个程序周期,外部控制器对反馈信号的比较量i
I
I
当反馈的比较量i
常规的负反馈控制系统由给定、比较器、控制器、执行器、被控对象、反馈环节构成。本发明的一种带外部控制负反馈调节功能的线性软启动控制方法的控制系统,控制系统由带外部控制负反馈功能的控制器(以下简称控制器)、执行器(软启动器)、被控对象、反馈环节构成,系统框图见图1。其中带外部控制负反馈功能的控制器集成了斜坡发生器(图中0-t
具体实施例一
以轧辊镀铬使用的可控硅整流电源为例,380V三相交流电源经过整流变压器降压后,输出电压为25V的12相低压交流电,经12个可控硅进行整流,再经过电抗器和电容滤波后变为直流电流输出,通过调整控制可控硅的触发脉冲导通角来控制输出直流电流的大小。
控制系统由带外部控制负反馈功能的控制器(以下简称控制器)、调节板、触发脉冲板、可控硅及输出电流变送器构成。带外部控制负反馈功能的控制器内部集成了斜坡发生器、比较器和控制器于一体的控制功能,其输出信号为0-10V电压信号,对应电源输出电流为0-15000A,0-10V电压信号作为调节板的输入信号输入调节板。调节板控制可控硅触发脉冲板,用于控制可控硅的导通角,从而控制电源的输出电流。在可控硅输出端的直流母排上装有直流电流变送器,将0-15000A的输出电流变送为0-10V电压信号,输入控制器进行反馈,实现闭环控制。
带外部控制负反馈功能的控制器的控制过程包括:
1)软启动阶段:
控制器的控制程序每t
x
在第一个软启程序周期,控制器对反馈的比较量i
I
I
控制器在该软启程序周期内输出i
x
在软启程序的第二个执行周期,假设反馈电压信号为0.0133V,对应电流比较量i
I
I
控制器在该软启程序周期内输出i
I
对应控制器输出电压为0.0178V。同时对剩余软启程序执行周期数量x
x
因此,我们发现每个软启程序周期内,输出增量在负反馈的作用下不断变化,保证最终输出电流的斜率保持不变。重复上述程序执行过程,当反馈的比较量i
2)稳定运行阶段:
控制器的控制程序每t
x
每个程序执行周期内,控制器对反馈的比较量i
I
由于I
i
控制器在该程序执行周期内,将输出i
下一个程序执行周期,重复执行上述过程,直至|i
3)软关阶段:
控制器的控制程序每t
x
在第一个软关程序周期,控制器对反馈的比较量i
I
I
控制器在该软关程序周期内输出量i
I
对应控制器输出电压为5.32V。同时对剩余软启程序执行周期数量x
x
在第二个软关程序周期,控制器对反馈的比较量i
I
I
控制器在该软关程序周期内输出量i
I
对应控制器输出电压为5.307V。同时对剩余软启程序执行周期数量x
x
因此,我们发现每个软关程序周期内,输出减少量在负反馈的作用下不断变化,保证最终输出电流的斜率保持不变。重复上述过程,当反馈的比较量i
由图2-图3的实施例图可见,本发明的一种带外部控制负反馈调节功能的线性软启动控制方法,通过设定的控制方法实现软启动及软关过程更加线性、准时,实际输出斜坡与设定斜坡一致。
对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以对本发明进行改进与修饰,这些改进和修饰也落入本发明权利要求的保护范围内。以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。