加液机器人及加液方法
文献发布时间:2023-06-19 09:30:39
技术领域
本发明属于实验设备技术领域,涉及一种加液机器人及加液方法,尤其涉及一种对试管添加试剂的机器人及方法。
背景技术
试剂溶液的制备是工业界和学术界实验室环境中最常见和最耗时的活动之一。在试剂溶液的制备中可能涉及许多任务,包括测量、分配、混合等;而实验人员为提高测试效率,一般都是批量测试,此时手动加液将占用实验员大量的时间和精力,加之不同人员之间的手动加液操作存在明显偏差,实验结果的可信度将受到影响。而且在制作试管样品时通常试管是带有试管盖的,通过实验人员手工操作完成拆盖/封盖效率比较低,还可能出现人工操作封盖不严、样本之间交叉污染等同样会影响实验结果的因素,同时,如若试剂样本对人体表皮具有腐蚀性或其他危害性,更加不利于实验人员的安全保证。
发明内容
本发明所要解决的技术问题是:提供一种加液机器人及加液方法,能够自动化进行加液,提升试管加液效率,防止人员溅伤。
为了解决上述技术问题,本发明采用的技术方案为:
本发明提供一种加液机器人,包括加液平台、电控箱、机械臂、加液装置和试管架;所述电控箱设于所述加液平台一侧,所述电控箱与所述机械臂、加液装置电性连接;所述机械臂一端连接有所述加液装置,所述加液装置包括升降机构、夹盖拧盖机构、加液机构和旋转夹瓶机构,所述升降机构上设置有升降导轨,所述夹盖拧盖机构和所述加液机构连接于所述升降导轨并沿所述升降导轨上下移动,所述旋转夹瓶机构安装于所述升降机构底面,所述试管架设于所述升降机构下方,所述试管架上排列放置有试管;
所述加液机器人还包括储液罐、泵浦机构,所述储液罐中存储有试剂,所述储液罐、泵浦机构和所述加液机构依次通过导流软管连接。
进一步地,所述升降机构包括升降主体,所述升降导轨设置于所述升降主体侧面,所述升降导轨包括第一升降导轨和第二升降导轨,所述夹盖拧盖机构和所述加液机构通过一连接板分别连接于所述第一升降导轨和所述第二升降导轨。
进一步地,所述升降主体上还设置有用于对所述旋转夹瓶机构和所述加液机构进行驱动的第一驱动机构和第二驱动机构,所述第一驱动机构和所述第二驱动机构通过传动带分别连接有垂直方向设置的第一传动螺杆和第二传动螺杆,所述第一传动螺杆和第二传动螺杆分别连接于所述连接板。
进一步地,所述夹盖拧盖机构包括固定座、第三驱动机构、第四驱动机构、丝杆、连接件和夹持件;所述夹盖拧盖机构通过所述固定座连接于所述连接板;所述第三驱动机构和所述第四驱动机构设于所述固定座上,所述连接件设于所述第三驱动机构下方,连接件与所述固定座通过轴承连接,所述丝杆连接于所述第三驱动机构并贯穿所述连接件;所述连接部下方设置所述夹持件。
进一步地,所述连接件包括上连接部和下连接部,所述上连接部连接于所述固定座并外套有一传动轮,所述传动轮与所述第四驱动机构通过一传动带连接。
进一步地,所述夹持件包括第一夹持件和第二夹持件,所述第一夹持件与所述第二夹持件竖直方向相对设置并通过轴杆安装于所述连接件上,所述第一夹持件和所述第二夹持件上端部夹持所述丝杆下端部,所述第一夹持件和所述第二夹持件下端部为相互配合的弧形夹口,所述弧形夹口贴合试管盖外形。
进一步地,所述加液机构包括固定板和束管筒,所述加液机构通过所述固定板连接于所述连接板,所述束管筒安装于所述固定板上,所述束管筒内固定有所述导流软管。
进一步地,所述旋转夹瓶机构包括固定架、第五驱动机构,第六驱动机构、伸缩杆和夹持杆;所述旋转夹瓶结构通过所述固定架连接于所述升降机构,所述第五驱动机构安装于所述升降主体上,所述第六驱动机构设于所述固定架尾端,所述夹持杆设于所述固定架前端,所述伸缩杆连接所述第六驱动机构并通过一拉杆连接于所述夹持杆。
进一步地,所述夹持杆包括第一夹持杆和第二夹持杆,所述第一夹持杆和所述第二夹持杆水平方向相对设置、通过轴杆连接于所述固定架前端,所述第一夹持杆和所述第二夹持杆上均设置有连接位,所述拉杆对应所述夹持杆设置有两个,两个所述拉杆分别通过所述连接位连接于所述夹持杆,所述拉杆另一端连接于所述伸缩杆,所述拉杆与所述夹持杆通过一轴杆连接。
进一步地,所述第一驱动机构、第二驱动机构、第三驱动机构、第四驱动机构、第五驱动机构、第六驱动机构均为电机驱动。
一种采用上述加液机器人的加液方法,其特征在于,所述方法包括:
S1、控制所述夹盖拧盖机构夹取试管并提升至高位;
S2、控制所述旋转夹瓶机构夹紧试管瓶身,所述夹盖拧盖机构旋转进行拧盖操作;
S3、所述旋转夹瓶机构将拧盖后的试管旋转移动至加液机构下方,所述加液机构添加试剂于试管中;
S4、所述旋转夹瓶机构将添加试剂的试管旋转移动至夹盖拧盖机构下方,所述夹盖拧盖机构安装上试管盖;
S5、旋转夹瓶机构松开试管瓶身,所述夹盖拧盖机构向下移动将试管放置于试管架上。
通过上述说明,本发明的有益效果在于:
提供一种加液机器人及加液方法,包括加液平台、电控箱、储液罐、泵浦机构、机械臂、升降机构、夹盖拧盖机构、加液机构、旋转夹瓶机构和试管架;该系统由电控箱自动化控制,旋转夹瓶机构和夹盖拧盖机构的相互配合实现试管盖的拆卸或旋紧,泵浦机构连接加液机构将存储罐中的试剂注射到试管中;该系统全程自动化进行,节省了人力成本,提高了试剂添加效率,同时解决人工操作中溶剂易溅伤操作人员、安全性不足的问题。
附图说明
下面结合附图详述本发明的具体结构
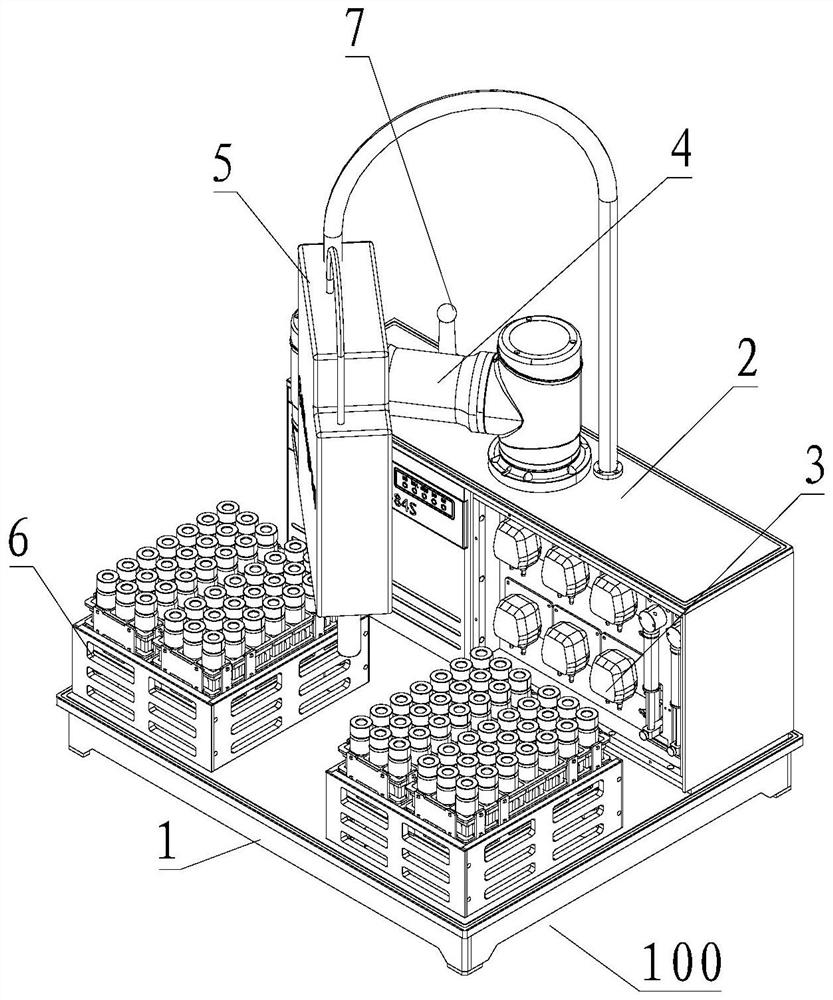
图1为本发明自动加液机器人结构示意图;
图2为本发明加液装置结构示意图;
图3为本发明升降机构结构示意图;
图4为本发明夹盖拧盖机构结构示意图;
图5为本发明旋转夹瓶机构结构示意图;
其中:100-加液机器人;1-加液平台;2-电控箱;3-泵浦机构;4-机械臂;5-加液装置;50-升降机构;501-升降主体;502-升降导轨;503-连接板;504-第一驱动机构;505-传动螺杆;506-第二驱动机构;51-夹盖拧盖机构;511-固定座;512-第三驱动机构;513-第四驱动机构;514-连接件;515-夹持件;52-加液机构;521-固定板;522-束管筒;53-旋转夹瓶机构;531-固定架;532-第五驱动机构;533-第六驱动机构;534-伸缩杆;535-拉杆;536-夹持杆;6-试管架;7-无线接收模块。
具体实施方式
为详细说明本发明的技术内容、构造特征、所实现目的及效果,以下结合实施方式并配合附图详予说明。
实施例1
本发明提供一种加液机器人100,其作用在于为试管自动化添加试剂溶液。请参阅图1-图2,本发明提供的加液机器人100,包括加液平台1、电控箱2、机械臂4、加液装置5和试管架6;所述加液平台1起承载系统组件的作用,电控箱2设于所述加液平台1一侧,作为加液机器人的控制单元,所述电控箱2与所述机械臂4、加液装置5电性连接;所述机械臂4一端连接有所述加液装置5并能够带动所述加液装置5在所处平面内移动。
所述加液装置5包括升降机构50、夹盖拧盖机构51、加液机构52和旋转夹瓶机构53,所述升降机构50上设置有升降导轨502,所述夹盖拧盖机构51和所述加液机构52连接于所述升降导轨502并沿所述升降导轨502上下移动,所述旋转夹瓶机构53安装于所述升降机构50底部,所述试管架6设于所述升降机构50下方,所述试管架6上排列放置有试管。
在加液装置5通过机械臂4移动至预定位置时,夹盖拧盖机构51从试管架6夹取试管并将试管提升到一个高度,随后,旋转夹瓶机构53夹住试管瓶身,夹稳后夹盖拧盖机构51进行拧盖,接着旋转夹瓶机构53夹着拧盖后的试管旋转到达加液机构52下方然后进行加液;加液完成后,旋转夹瓶机构53带动试管旋转回到夹盖拧盖机构51下方进行拧盖动作,拧盖完成后旋转夹瓶机构53松开试管,夹盖拧盖机构51夹着拧好盖的试管下降,放回试管架位置。需要说明的是,夹盖拧盖机构51夹持试管的试管盖。
进一步地,所述加液机器人100还包括储液罐、泵浦机构3,所述储液罐中存储有试剂,所述储液罐、泵浦机构3和所述加液机构52依次通过导流软管连接。
具体的,参阅图2为升降机构50结构示意图,所述升降机构50包括升降主体501,升降主体501上设有机构连接板与机械臂4连接,所述升降导轨502设置于升降主体501相对的两侧面,包括第一升降导轨和第二升降导轨,其第一升降导轨和第二升降导轨上分别连接有一连接板503,所述夹盖拧盖机构51和所述加液机构52通过连接板503分别连接于第一升降导轨和第二升降导轨,使夹盖拧盖机构51和所述加液机构52能够分别控制进行移动。
相对应的,在升降主体501上设置有用于对所述旋转夹瓶机构53和所述加液机构52进行驱动的第一驱动机构504和第二驱动机构506,所述第一驱动机构504和所述第二驱动机构506通过传动带分别连接有垂直方向设置的第一传动螺杆和第二传动螺杆,其驱动机构和传动螺杆上均连接有同步轮,能够达到同步动力传输的效果,所述第一传动螺杆和第二传动螺杆的杆体还分别连接旋转夹瓶机构53和加液机构52对应的连接板503,当所述第一驱动机构504和第二驱动机构506带动所述第一传动螺杆和第二传动螺杆旋转时,其对应的连接板503会沿着传动螺杆505上下移动,进而带动旋转夹瓶机构53和加液机构52沿升降导轨502上下移动。
所述夹盖拧盖机构51包括固定座511、第三驱动机构512、第四驱动机构513、丝杆、连接件514和夹持件515;夹盖拧盖机构51通过所述固定座511连接于所述连接板503;所述第三驱动机构512和所述第四驱动机构513设于所述固定座511上,所述连接件514设于所述第三驱动机构512下方,连接件514与所述固定座511通过轴承连接,所述丝杆连接于所述第三驱动机构512并贯穿所述连接件514;所述连接部下方设置所述夹持件515。
具体的,所述固定座511为“L”型固定座,包括竖向固定板和横向固定板,所述竖向固定板外侧壁贴合固定于连接板503,内侧壁固定连接第三驱动机构512,所述第四驱动机构513安装于横向固定板上。
进一步地,所述连接件514包括上连接部和下连接部,所述上连接部连接于所述横向固定板521并外套有一传动轮,所述传动轮与所述第四驱动机构513通过一传动带连接。所述夹持件515包括第一夹持件和第二夹持件,所述第一夹持件与所述第二夹持件竖直方向相对设置并通过轴杆连接于所述连接件514,所述第一夹持件和所述第二夹持件上端部夹持所述丝杆下端部,所述丝杆下端部为锥形结构,所述第一夹持件和所述第二夹持件下端部为相互配合的弧形夹口,所述弧形夹口贴合试管盖外形。
在夹持件515夹持试管盖时,由第三驱动机构512驱动与之连接的丝杆向下运动,丝杆锥形端逐渐挤压相互夹持的夹持件515上端部,使第一夹持件与第二夹持件上端部向外分离,进而第一夹持件和第二夹持件绕所述轴杆旋转,第一夹持件与第二夹持件下端部逐渐闭合,形成对试管盖的夹持形态,而贴合于试管盖的外形能够更好的提升夹持稳固性。
在对试管盖进行拆卸时,由第四驱动机构513通过传动轮带动连接件514转动,进而使夹持有试管盖的夹持件515转动,配合夹盖拧盖机构51的上下移动性能,能够将试管盖与试管进行拆卸分离。
进而,对试管进行加液操作,加液机构对准试管添加试剂。参阅图2,所述加液机构52包括固定板521、和束管筒522,所述加液机构52通过所述固定板521连接于所述连接板503,所述束管筒522安装于所述固定板521上,所述束管筒522内固定有所述导流软管。
需要说明的是,在进行拆卸试管盖之前,需要将试管进行夹持固定,参阅图5为本发明旋转夹瓶机构53结构示意图,所述旋转夹瓶机构53包括固定架531、第五驱动机构532,第六驱动机构533、伸缩杆534和夹持杆536;旋转夹瓶结构通过所述固定架531连接于升降机构50,所述第五驱动机构532安装于所述升降主体501上,所述第六驱动机构533设于所述固定架531尾端,所述夹持杆536设于所述固定架531前端,所述伸缩杆534连接所述第六驱动机构533并通过拉杆535连接于所述夹持杆536。
具体地,所述夹持杆536包括第一夹持杆和第二夹持杆,所述第一夹持杆和所述第二夹持杆水平方向相对设置、通过轴杆连接于所述固定架531前端,所述第一夹持杆和所述第二夹持杆上均设置有连接位,所述拉杆535对应所述夹持杆536设置有两个,两个所述拉杆535分别通过所述连接位连接于所述夹持杆536,所述拉杆535另一端连接于所述伸缩杆534,所述拉杆535与所述夹持杆536通过轴杆连接。
在进行夹持时,第六驱动电机带动伸缩杆534往前推,使两个拉杆535分别推动第一夹持杆和第二夹持杆绕其轴杆转动,第一夹持杆和第二夹持杆向内闭合夹持试管。同时,旋转夹瓶机构53还具有旋转功能,在于将试管旋转移动至加液机构52下方进行加液操作或将加液完成的试管旋转移动至夹盖拧盖机构下方进行加盖操作,所述旋转功能由第五驱动机构532进行驱动。
在本实施例中,所述电控箱2还连接有无线接收模块7,所述无线接收模块7外部设置有防腐保护层,所述无线接收模块7设置于电控箱2箱体外部,无线接收模块7连接移动客户端,操作人员通过移动客户端即可实现加液机器人100远程控制。所述泵浦机构3包括蠕动泵和注射泵;所述第一驱动机构、第二驱动机构、第三驱动机构、第四驱动机构、第五驱动机构、第六驱动机构均为电机驱动;同时,在加液平台1周边设置有沟槽,能够防止液体流出污染实验环境;所述试管架上设有卡位,人工取放试管的过程中,预先将试管摆放于试管取放框中,所述试管取放框与试管架上的卡位形成锥度配合,提升试管摆放稳定性。
实施例2
本发明还提供一种采用上述加液机器人的加液方法,所述方法包括:
S1、控制所述夹盖拧盖机构夹取试管并提升至高位;
S2、控制所述旋转夹瓶机构夹紧试管瓶身,所述夹盖拧盖机构旋转进行拧盖操作;
S3、所述旋转夹瓶机构将拧盖后的试管旋转移动至加液机构下方,所述加液机构添加试剂于试管中;
S4、所述旋转夹瓶机构将添加试剂的试管旋转移动至夹盖拧盖机构下方,所述夹盖拧盖机构安装上试管盖;
S5、旋转夹瓶机构松开试管瓶身,所述夹盖拧盖机构向下移动将试管放置于试管架上。
该控制方法由电控箱下达控制指令,全自动化进行,节省了人力成本,提高了试剂添加效率,同时解决人工操作中溶剂易溅伤操作人员、安全性不足的问题。
此处第一、第二……只代表其名称的区分,不代表它们的重要程度和位置有什么不同。
此处,上、下、左、右、前、后只代表其相对位置而不表示其绝对位置
以上所述仅为本发明的实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本发明的专利保护范围内。
- 一种加液方法、维护站、清洁机器人及加液系统
- 消毒机器人自动加液装置及自动加液方法