一种自动充绒控制系统
文献发布时间:2023-06-19 09:38:30
技术领域
本发明涉及制衣装置技术领域,特别涉及一种自动充绒控制系统。
背景技术
随着社会不断的在发展,人们对于羽绒服装的需求量也在日益增加,然而大多的羽绒产业还处于人工填充阶段,原始的人工充绒很难满足现在社会发展的需求了。目前较好的充绒方法就是使用充绒机进行充绒,充绒机配有充绒炮筒,在充绒时直接将充绒炮筒插装在待充填的胆腔内进行充绒,并且现有的羽绒充绒机的启停,多采用脚踏控制,当充绒管伸入到胆腔内后踩踏脚踏板,启动充绒机开始充绒。这样的加工方法存在如下缺点:一、充绒慢、工作效率低、工人劳动强度大;二、羽绒充填过程中需要大量人工,提高了企业的用工成本。
发明内容
本发明要解决的技术问题在于,针对现有技术的上述缺陷,提供一种自动充绒控制系统,能够提升充绒效率、工作效率高、节省人工成本。
为了解决上述技术问题,本发明的技术方案是:
一种自动充绒控制系统,包括红外传感单元、重力传感单元、时钟电路、主控电路、负压机、减速电机及搅拌装置,所述红外传感单元的输出端与时钟电路电连接,所述重力传感单元的输出端及时钟电路均与所述主控电路电连接,所述主控电路的输出端分别与所述负压机及减速电机电连接,所述减速电机与所述搅拌装置电连接。
优选地,所述负压机安装于充绒箱内,所述搅拌装置通过传输管道与所述充绒机连接。
优选地,所述红外传感单元包括红外传感器及与所述红外传感器电连接的红外探头,所述红外探头及重力传感单元均安装于所述充绒箱内。
优选地,所述时钟电路包括定时芯片U1、电阻R1、电阻R2、电阻R3、电阻R4及二极管D1,所述电阻R1的一端与定时芯片U1的第二引脚连接,所述电阻R1的另一端与主控电路连接,所述电阻R2的一端与定时芯片U1的第一引脚连接,所述电阻R2的另一端、电阻R3的一端及二极管D1的阳极均与定时芯片U3的第六引脚连接,所述电阻R3的另一端及电阻R4的一端均与定时芯片U1的第七引脚连接,所述电阻R4的另一端接地。
优选地,所述主控电路包括单片机芯片U2、电阻R5、电阻R6、晶振X1、负压机接口P2、减速电机接口P3及重力传感接口P4,所述电阻R5的一端及电阻R6的一端均与单片机芯片U2的第十三引脚及第十八引脚连接,所述电阻R5的另一端与所述时钟电路连接,所述晶振X1分别与所述单片机芯片U2的第五引脚及第六引脚连接,所述负压机接口P2的第一引脚依次经二极管D3及电阻R10与所述单片机芯片U2的第二十九引脚连接,所述减速电机接口P3的第一引脚依次经二极管D4及电阻R14与所述单片机芯片U2的第二十八引脚连接,所述重力传感接口P4的第三引脚经电阻R7与单片机芯片U2的第二十六引脚连接,所述重力传感接口P4的第二引脚经电阻R8与单片机芯片U2的第二十五引脚连接,所述单片机芯片U2的第二十五引脚经电阻R9接地。
优选地,所述搅拌装置包括电源接口P5,所述电源接口P5的第四引脚依次经电阻R15及二极管D4与所述减速电机接口P3的第一引脚连接。
采用上述技术方案,本发明提供的一种自动充绒控制系统,具有以下有益效果:该自动充绒控制系统中的红外传感单元的输出端与时钟电路电连接,重力传感单元的输出端及时钟电路均与主控电路电连接,主控电路的输出端分别与负压机及减速电机电连接,减速电机与搅拌装置电连接,通过红外传感单元检测充绒机内的绒毛,并通过重力传感器识别绒毛的重量,并由时钟电路设定充绒次数,由主控电路输出控制信号控制负压机及减速电机的工作状态,进而控制搅拌装置对绒毛进行搅拌,负压机用于根据控制信号进行自动充绒,因而能够提升充绒效率,大大提高充绒机的工作效率高,无需人工进行充绒,大大节省人工成本。
附图说明
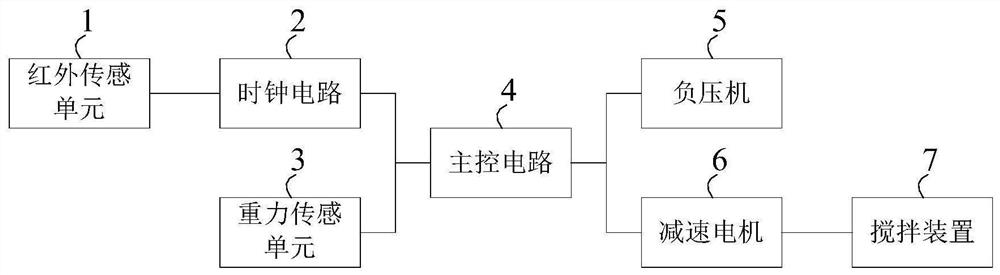
图1为本发明的结构框图;
图2为本发明的电路原理图;
图中,1-红外传感单元、2-时钟电路、3-重力传感单元、4-主控电路、5-负压机、6-减速电机、7-搅拌装置。
具体实施方式
下面结合附图对本发明的具体实施方式作进一步说明。在此需要说明的是,对于这些实施方式的说明用于帮助理解本发明,但并不构成对本发明的限定。此外,下面所描述的本发明各个实施方式中所涉及的技术特征只要彼此之间未构成冲突就可以相互组合。
在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”、“顺时针”、“逆时针”、“轴向”、“径向”、“周向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。在本发明的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。
如图1所示,在本发明的结构框图中,该自动充绒控制系统包括红外传感单元1、重力传感单元3、时钟电路2、主控电路4、负压机5、减速电机6及搅拌装置7,该红外传感单元1的输出端与时钟电路2电连接,该重力传感单元3的输出端及时钟电路2均与该主控电路4电连接,该主控电路4的输出端分别与该负压机5及减速电机6电连接,该减速电机6与该搅拌装置7电连接。可以理解的,该负压机5安装于充绒箱内,该搅拌装置7通过传输管道与该充绒机连接;该红外传感单元1包括红外传感器及与该红外传感器电连接的红外探头,该红外探头及重力传感单元3均安装于该充绒箱内,该重力传感单元3可以是重力传感器等。该负压机5用于充绒,该搅拌装置7用于搅拌毛绒,该负压机5通用的负压机,例如抽绒泵等,减速电机6为通用的减速电机,例如电动马达等,该搅拌装置7为通用的搅拌器,例如绒毛搅拌箱等,本发明不再赘述。
具体地,图2为本发明的电路原理图,结合图1及图2可知,该时钟电路2包括定时芯片U1、电阻R1、电阻R2、电阻R3、电阻R4及二极管D1,该电阻R1的一端与定时芯片U1的第二引脚连接,该电阻R1的另一端与主控电路4连接,该电阻R2的一端与定时芯片U1的第一引脚连接,该电阻R2的另一端、电阻R3的一端及二极管D1的阳极均与定时芯片U3的第六引脚连接,该电阻R3的另一端及电阻R4的一端均与定时芯片U1的第七引脚连接,该电阻R4的另一端接地;该主控电路4包括单片机芯片U2、电阻R5、电阻R6、晶振X1、负压机5接口P2、减速电机6接口P3及重力传感接口P4,该电阻R5的一端及电阻R6的一端均与单片机芯片U2的第十三引脚及第十八引脚连接,该电阻R5的另一端与该时钟电路2连接,该晶振X1分别与该单片机芯片U2的第五引脚及第六引脚连接,该负压机5接口P2的第一引脚依次经二极管D3及电阻R10与该单片机芯片U2的第二十九引脚连接,该减速电机6接口P3的第一引脚依次经二极管D4及电阻R14与该单片机芯片U2的第二十八引脚连接,该重力传感接口P4的第三引脚经电阻R7与单片机芯片U2的第二十六引脚连接,该重力传感接口P4的第二引脚经电阻R8与单片机芯片U2的第二十五引脚连接,该单片机芯片U2的第二十五引脚经电阻R9接地;该搅拌装置7包括电源接口P5,该电源接口P5的第四引脚依次经电阻R15及二极管D4与该减速电机6接口P3的第一引脚连接。可以理解的,上述元器件引脚之间的连接关系均为通用的连接,本发明不再赘述。该定时芯片U1可以是DS1302芯片等,该单片机芯片U2可以是STM32F103C8T6芯片等,该负压机5接口P2、减速电机6接口P3及重力传感接口P4分别通过电源线与该负压机5、减速电机6、重力传感单元3电连接,该电源接口P5通过电源线与搅拌装置7电连接。
可以理解的,本发明设计合理,构造独特,通过设置红外传感单元1检测充绒机内的绒毛,并通过重力传感器识别绒毛的重量,并由时钟电路2设定每一时段的充绒次数,即充绒频率,可根据用户需求进行设置,由主控电路4输出控制信号控制负压机5及减速电机6的工作状态,进而控制搅拌装置7对绒毛进行搅拌,负压机5用于根据控制信号进行自动充绒,因而能够提升充绒效率,大大提高充绒机的工作效率高,无需人工进行充绒,大大节省人工成本。
以上结合附图对本发明的实施方式作了详细说明,但本发明不限于所描述的实施方式。对于本领域的技术人员而言,在不脱离本发明原理和精神的情况下,对这些实施方式进行多种变化、修改、替换和变型,仍落入本发明的保护范围内。
- 一种充绒精确的自动充绒机构
- 一种充绒精确的自动充绒机构