一种城市场景实时高精定位方法
文献发布时间:2023-06-19 09:40:06
技术领域
本发明涉及智慧交通和智慧城市技术领域,具体涉及一种城市场景实时高精定位方法。
背景技术
城市场景的实时车载高精度定位的精确性和稳定性,直接决定了在包括level3/4级别智慧汽车和智慧城市等众多高精度位置服务应用的落地效果;目前比较常见的实时车载定位方案,多是基于GNSS,轮速等传感器,结合多传感器融合算法;而城市作为业界公认的困难场景,其难点主要在于GNSS的信号会受到高楼,高架等遮挡,导致定位精度不稳定且不可预估,为了解决这个问题,本发明提出使用机器学习的方法,使用人工智能模型,学习并建立GNSS的精度状态与卫星观测的原始数据和其他车载传感器的关系,从而能够通过观测车载传感器的数据,实时判断GNSS的精度,最终根据GNSS的精度采取不同的定位方案;因此,设计出一种城市场景实时高精定位方法,对于目前智慧交通和智慧城市技术领域来说是迫切需要的。
发明内容
本发明提供一种城市场景实时高精定位方法,以解决现有技术存在的问题。
为了实现上述目的,本发明实施例提供如下技术方案:
根据本发明的实施例,一种城市场景实时高精定位方法,包括定位真值和传感器测量原始数据,所述定位真值的输出端连接有数据处理的输入端,所述数据处理的输出端连接有计算误差的输入端,所述计算误差的输出端分别连接有监督式训练和误差分类的输入端,且误差分类的输出端与监督式训练的输入端相互连接,所述传感器测量原始数据的输出端分别与计算误差和监督式训练的输入端相互连接,所述监督式训练的输出端连接有GNSS状态判断器的输入端,所述GNSS状态判断器的输出端连接有模型部署的输入端,并且模型部署的输入端连接有传感器测量原始数据的输出端,所述模型部署的输出端连接有GNSS状态估计的输入端,所述GNSS状态估计的输出端分别连接有第一融合模块和第二融合模块,且第一融合模块和第二融合模块中分别设置有第一多传感器融合和第二多传感器融合,所述城市场景实时高精定位方法包括如下步骤:
A、当GNSS的精度实时判断;
a、采用线下模型训练;
(a)、收集车载传感器原始数据;
(b)、同时收集高端组合惯导的原始数据;
(c)、对(b)中收集的原始数据,通过后进行ppk技术处理,解算出精确的定位位置作为真值;
(d)、对(a)中的原始GNSS的定位位置与(c)的真值做差,得到每一帧GNSS的误差;
(e)、将(d)得到的连续变量的误差大小,转化为精度特高、高、中和低的四挡离散变量,百分比为GNSS传感器本征精度的percentile统计量;
(f)、使用机器学习模型,建立(a)的数据和(e)的映射关系;
b、模型部署;
(a)、在车载实时运行过程中,收集车载传感器的原始数据;
(b)、把收集到的每一帧原始数据发送给模型,并计算出对应的GNSS精度;
B、当使用GNSS精度状态时;
a、动态标定其他车载传感器;
(a)、在GNSS精度为特高的时候,计算GNSS观测到的车辆运行速度,从而标定和修正轮速;
(b)、在GNSS精度为特高的时候,计算GNSS观测到的车辆运行角度,从而标定和修正惯导;
b、修改GNSS在不同精度状态下的多传感器融合中的权重,提升多传感器融合的结果。
进一步地,所述第一多传感器融合的输入端分别与高精地图、智能相机、GNSS、轮速和惯导的输入端相互连接,并且当使用GNSS在状态好的时候观测值动态标定轮速和惯导。
进一步地,所述第二多传感器融合的输入端分别与高精地图、智能相机、轮速和惯导的输入端相互连接。
进一步地,所述误差分类7采用训练分类模型,将误差分为精度不同的四挡离散变量,其数值对应分别为特高(e.g.5%)、高(e.g.15%)、中(e.g.50%)和低(e.g.100%)。
进一步地,所述监督式训练通过监督式机器学习的训练手段可分为训练分类模型和训练回归模型。
本发明具有如下优点:
1.该城市场景实时高精定位方法通过设计的GNSS状态判断器能够有效的解决了GNSS状态精度难以精确判断的技术问题,同时使装置整体的定位更加精准。
2.该城市场景实时高精定位方法能在GNSS精度为特高的状态时,通过GNSS观测到的车辆运行速度和车辆运行角度,可以动态标定与修正轮速和惯导,能够有效的优化车载传感器在运行过程中的不稳定问题,增强了装置定位的精确性与稳定性。
3.该城市场景实时高精定位方法通过设计的通过修改GNSS在不同精度状态下的多传感器融合中的权重,提升多传感器融合的结果,大大提升定多传感器融合算法对于GNSS高精度状态下的依赖,提升了定位精确性;降低传感器融合算法对于GNSS低精度下造成的伤害,提升定位的稳定性,有效的解决了城市场景中因复杂场景遮挡导致GNSS精度不准和不稳对高精定位带来的影响。
附图说明
为了更清楚地说明本发明的实施方式或现有技术中的技术方案,下面将对实施方式或现有技术描述中所需要使用的附图作简单地介绍。显而易见地,下面描述中的附图仅仅是示例性的,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图引伸获得其它的实施附图。
本说明书所绘示的结构、比例、大小等,均仅用以配合说明书所揭示的内容,以供熟悉此技术的人士了解与阅读,并非用以限定本发明可实施的限定条件,故不具技术上的实质意义,任何结构的修饰、比例关系的改变或大小的调整,在不影响本发明所能产生的功效及所能达成的目的下,均应仍落在本发明所揭示的技术内容能涵盖的范围内。
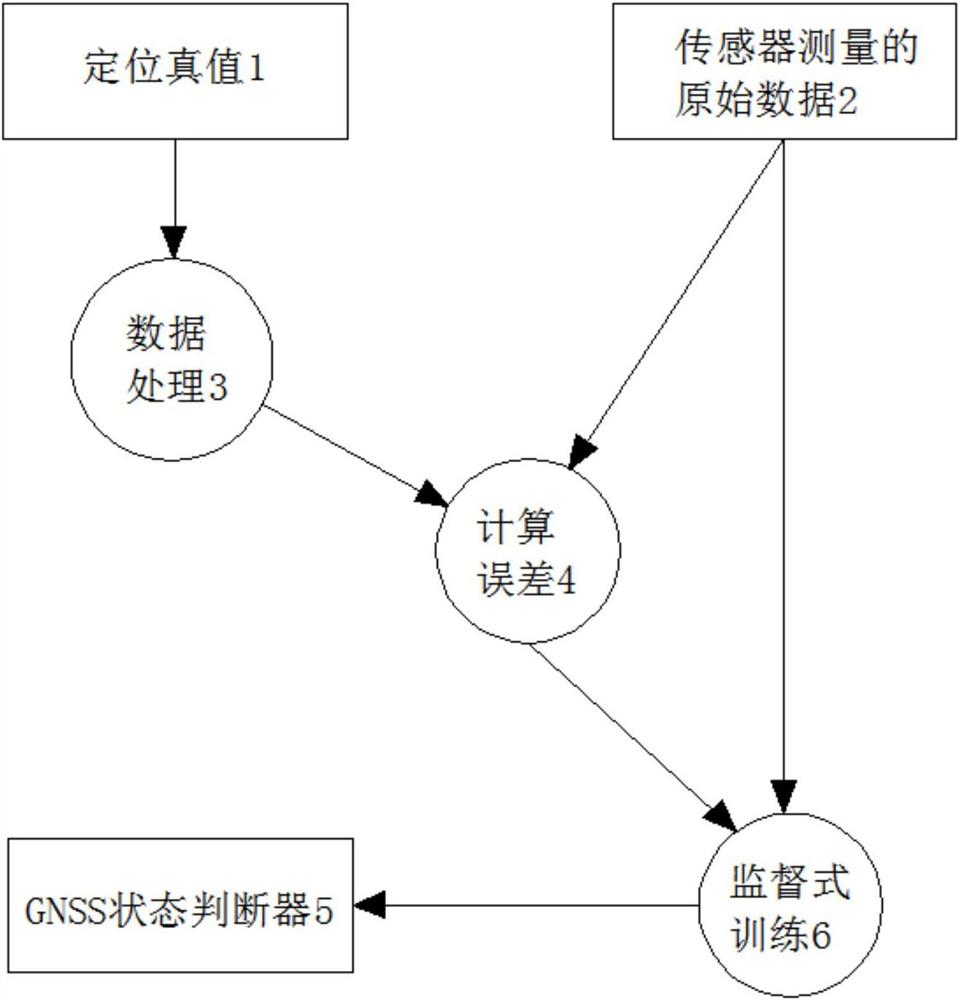
图1为本发明的高线判断器训练机器学习回归模型架构示意图;
图2为本发明的高线判断器训练机器学习分类模型架构示意图;
图3为本发明的实车实时定位架构示意图;
图中:1、定位真值;2、传感器测量原始数据;3、数据处理;4、计算误差;5、GNSS状态判断器;6、监督式训练;7、误差分类;8、模型部署;9、GNSS状态估计;10、第一多传感器融合;11、第二多传感器融合。
具体实施方式
以下由特定的具体实施例说明本发明的实施方式,熟悉此技术的人士可由本说明书所揭露的内容轻易地了解本发明的其他优点及功效,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
本说明书中所引用的如“上”、“下”、“左”、“右”、“中间”等的用语,亦仅为便于叙述的明了,而非用以限定本发明可实施的范围,其相对关系的改变或调整,在无实质变更技术内容下,当亦视为本发明可实施的范畴。
请参阅图1-3,本发明提供一种技术方案:
一种城市场景实时高精定位方法,包括定位真值1和传感器测量原始数据2,传感器测量原始数据2为车端传感器的观测数据,同时也是定位算法的输入,定位真值1为车辆可信的定位位置原始数据,可通过高端组合惯导定位仪器获得,并且数据的频率大于定位算法输出频率,定位真值1的输出端连接有数据处理3的输入端,数据处理3对定位真值1的结果通常需要后处理才能准确获得,数据处理3的输出端连接有计算误差4的输入端,计算误差4所计算观测得到的GNSS的位置与定位真值的相对误差,作为判断GNSS好坏的原始依据,计算误差4的输出端分别连接有监督式训练6和误差分类7的输入端,且误差分类7的输出端与监督式训练6的输入端之间相互连接,传感器测量原始数据2的输出端分别与计算误差4和监督式训练6的输入端相互连接,监督式训练6的输出端连接有GNSS状态判断器5的输入端,GNSS状态判断器5监督式训练的结果,对于不同的传感器观测数据,估计其对应的GNSS状态,在车辆行驶中,提供实时判定,GNSS状态判断器5的输出端连接有模型部署8的输入端,模型部署8将传感器测量原始数据2送至GNSS状态判断器5内,通过模型计算得出GNSS状态并且估计当前GNSS的状态是好是坏,同时GNSS状态判断器5对监督式训练6的结果,对于不同的传感器观测数据,估计其对应的GNSS状态,可以在车辆行驶中,提供实时判定,并且模型部署8的输入端连接有传感器测量原始数据2的输出端,模型部署8的输出端连接有GNSS状态估计9的输入端,GNSS状态估计9的输出端分别连接有第一融合模块和第二融合模块,且第一融合模块和第二融合模块中分别设置有第一多传感器融合10和第二多传感器融合11,在GNSS的精度很高的情况下,把GNSS的观测纳入多传感器融合算法,在GNSS的精度很差的情况下,把GNSS的观测挪出多传感器融合算法,城市场景实时高精定位方法包括如下步骤:
A、当GNSS的精度实时判断;
a、采用线下模型训练;
(a)、收集车载传感器原始数据;
(b)、同时收集高端组合惯导的原始数据;
(c)、对(b)中收集的原始数据,通过后进行ppk技术处理,解算出精确的定位位置作为真值;
(d)、对(a)中的原始GNSS的定位位置与(c)的真值做差,得到每一帧GNSS的误差;
(e)、将(d)得到的连续变量的误差大小,转化为精度特高、高、中和低的四挡离散变量,百分比为GNSS传感器本征精度的percentile统计量;
(f)、使用机器学习模型,建立(a)的数据和(e)的映射关系;
b、模型部署;
(a)、在车载实时运行过程中,收集车载传感器的原始数据;
(b)、把收集到的每一帧原始数据发送给模型,并计算出对应的GNSS精度;
B、当使用GNSS精度状态时;
a、动态标定其他车载传感器;
(a)、在GNSS精度为特高的时候,计算GNSS观测到的车辆运行速度,从而标定和修正轮速;
(b)、在GNSS精度为特高的时候,计算GNSS观测到的车辆运行角度,从而标定和修正惯导;
b、修改GNSS在不同精度状态下的多传感器融合中的权重,提升多传感器融合的结果。
本发明中:第一多传感器融合10的输入端分别与高精地图、智能相机、GNSS、轮速和惯导的输入端相互连接,并且当使用GNSS在状态好的时候观测值动态标定轮速和惯导,计算GNSS观测到的车辆运行速度和车辆运行角度,获得动态标定与修正轮速和惯导,能够有效的优化车载传感器在运行过程中的不稳定问题,增强了装置定位的精确性与稳定性。
本发明中:第二多传感器融合11的输入端分别与高精地图、智能相机、轮速和惯导的输入端相互连接,在GNSS的精度很差的情况下,把GNSS的观测挪出多传感器融合算法,可以有效的根据GNSS的精度采取不同的定位方案。
本发明中:误差分类7采用训练分类模型,将误差分为精度不同的四挡离散变量,其数值对应分别为特高(e.g.5%)、高(e.g.15%)、中(e.g.50%)和低(e.g.100%),在训练分类模型中,误差分类7能够快速准确的将误差进行不同级别的离散变量的归类处理,有效的提升了装置整体的效率。
本发明中:监督式训练6通过监督式机器学习的训练手段可分为训练分类模型和训练回归模型,使用监督式机器学习的方法,使用人工智能训练分类模型和训练回归模型,可以学习并建立GNSS的精度状态与卫星观测的原始数据和其他车载传感器的关系,从而能够通过观测车载传感器的数据,实时判断GNSS的精度。
虽然,上文中已经用一般性说明及具体实施例对本发明作了详尽的描述,但在本发明基础上,可以对之作一些修改或改进,这对本领域技术人员而言是显而易见的。因此,在不偏离本发明精神的基础上所做的这些修改或改进,均属于本发明要求保护的范围。
- 一种城市场景实时高精定位方法
- 一种集成机载LIDAR和车载移动激光扫描技术的高精细三维城市场景构建方法