一种狗粮及其制备系统与方法
文献发布时间:2023-06-19 09:41:38
技术领域
本发明涉及狗粮制备,更具体的说是一种狗粮及其制备系统与方法。
背景技术
例如公开号CN206949495U一种新型狗粮加工设备,包括加工室、机身、控制屏、卸料室、导线、电机箱、滑轮、模盘、底盘、压辊、第一压辊、第二压辊、辊轮、固定栓、连动杆、渗漏孔、连接孔。本实用新型提供一种结构简单、使用方便、工作效率更高、研磨更加充分的狗粮加工设备。通过在装置内部安装的压辊上加装两个辊轮,并由连动杆固定,构成十字结构的压辊,使整块的狗粮在研磨时更加充分,设备工作效率更高,与以往的狗粮加工设备相比,能够更加快速的完成狗粮的加工;该实用新型的缺点是不能对大批量骨头进行劈开处理。
发明内容
本发明的目的是提供一种狗粮及其制备系统与方法,可以对大批量骨头进行劈开处理。
本发明的目的通过以下技术方案来实现:
一种狗粮制备系统,包括装置支架、夹紧机构、闭合机构、切割机构和扶正机构,所述装置支架内连接有夹紧机构,装置支架的底部设置有闭合机构,装置支架的上端固定连接有切割机构,装置支架上连接有扶正机构。
作为本技术方案的进一步优化,本发明一种狗粮制备系统,所述装置支架包括侧挡板、滑动槽、安装支架和连接支架,侧挡板设置有两个,两个侧挡板的下端均设置有滑动槽,两个侧挡板的外侧均固定连接有安装支架,两个侧挡板的上端之间固定连接有连接支架。
作为本技术方案的进一步优化,本发明一种狗粮制备系统,所述夹紧机构包括底部挡板、滑动支板、滑动挡板、夹紧电机和夹紧螺纹杆,底部挡板设置有两个,两个底部挡板均滑动连接在两个侧挡板之间,两个底部挡板上均固定连接有两个滑动支板,两侧的两个滑动支板之间均滑动连接有四个滑动挡板,每个滑动挡板上均设置有定位钉,夹紧电机固定连接在一侧的侧挡板上,夹紧螺纹杆转动连接在另一侧的侧挡板上,夹紧螺纹杆和夹紧电机的输出轴传动连接,位于夹紧螺纹杆一侧的两个滑动支板均通过螺纹连接在夹紧螺纹杆上,夹紧螺纹杆两端的螺纹旋向相反,两侧的四个滑动挡板之间分别形成三个插槽。
作为本技术方案的进一步优化,本发明一种狗粮制备系统,所述闭合机构包括闭合底板、闭合滑块和闭合连杆,闭合底板设置有两个,闭合滑块设置有两个,两个闭合滑块分别滑动连接在两个安装支架上,两个闭合底板均滑动连接在两个滑动槽之间,两个闭合底板和两个闭合滑块之间均铰接有闭合连杆,闭合滑块和安装支架之间固定连接有压缩弹簧Ⅰ。
作为本技术方案的进一步优化,本发明一种狗粮制备系统,所述切割机构包括伸缩机构Ⅰ、切割支架、切割刀具和切割压板,伸缩机构Ⅰ的伸缩端固定连接有切割支架,切割支架上固定连接有切割刀具,切割支架上滑动连接有两个切割压板,两个切割压板和切割支架之间均固定连接有压缩弹簧Ⅱ,两个切割压板分别位于切割刀具的两侧。
作为本技术方案的进一步优化,本发明一种狗粮制备系统,所述扶正机构包括扶正电机、扶正曲轴Ⅰ、传动机构、扶正曲轴Ⅱ、扶正推板和扶正连杆,扶正电机固定连接在两个侧挡板的后端之间,扶正电机的输出轴上固定连接有扶正曲轴Ⅰ,传动机构转动连接在位于右侧的侧挡板上,扶正曲轴Ⅰ和传动机构传动连接,扶正曲轴Ⅱ转动连接在两个侧挡板的前端之间,传动机构和扶正曲轴Ⅱ传动连接,扶正推板设置三个,三个扶正推板分别滑动连接在两侧四个滑动挡板之间形成的插槽内,其中两个扶正推板滑动连接在位于前端上下两侧的两个插槽内,另一个扶正推板滑动连接在位于后端中部的一个插槽内,三个扶正推板上均铰接有扶正连杆,其中两个扶正连杆滑动连接在扶正曲轴Ⅱ的偏心处,另一个扶正连杆滑动连接在扶正曲轴Ⅰ的偏心处。
作为本技术方案的进一步优化,本发明一种狗粮制备系统,所述狗粮制备系统还包括支撑机构,支撑机构包括伸缩机构Ⅱ和支撑底板,伸缩机构Ⅱ的伸缩端固定连接有支撑底板,支撑机构设置有三个,其中一个伸缩机构Ⅱ滑动连接在两个侧挡板的前端之间,三个伸缩机构Ⅱ上均连接有定位钉,另外两个伸缩机构Ⅱ滑动连接在两个侧挡板的后端之间,位于前端的支撑底板滑动连接在位于前端中部的插槽内,位于后端的两个支撑底板分别滑动连接在位于后端上下两侧的插槽内。
作为本技术方案的进一步优化,本发明一种狗粮制备系统,所述狗粮制备系统还包括出料机构,出料机构包括出料支架、出料侧板、出料带和调整螺纹杆,出料支架的前后两侧均固定连接有出料侧板,两个出料侧板之间转动连接有三个出料轮,三个出料轮之间通过出料带传动连接,调整螺纹杆转动连接在出料支架上,出料机构设置有两个,两个出料支架分别滑动连接在两个安装支架上,两个调整螺纹杆分别通过螺纹连接在两个安装支架上。
一种狗粮制的方法,所述该方法包括以下步骤:
S1;预先根据骨头的长度调整两个底部挡板之间的相对距离,将多根骨头放置在两侧的四个滑动挡板之间;
S2;启动扶正机构,扶正机构对两个侧挡板之间和两侧的四个滑动挡板之间的多根骨头进行扶正;
S3;启动切割机构,切割机构对多根骨头的中部进行切割处理。
一种狗粮,所述狗粮由以下重量份的原料制成:改性玉米淀粉50至60份、畜禽肝脏18至28份、冻干猪肉10至20份、鱼肉12至22份、鸡蛋5至10份、骨头棒10至15份、食盐1至2份和植物油2至3份。
本发明一种狗粮及其制备系统与方法的有益效果为:
本发明一种狗粮及其制备系统与方法,可以根据骨头的大致长度调整夹紧机构,使得夹紧机构可以对骨棒的前后两侧进行挤压,扶正机构对装置内的多根骨头中可能存在的倾斜的骨头进行上下扶正,保证骨头不会处于竖直状态的倾斜状态,支撑机构插入和扶正机构配合对多个骨头的两端进行硬支撑,切割机构对骨头的中部进行切割。
附图说明
下面结合附图和具体实施方法对本发明做进一步详细的说明。
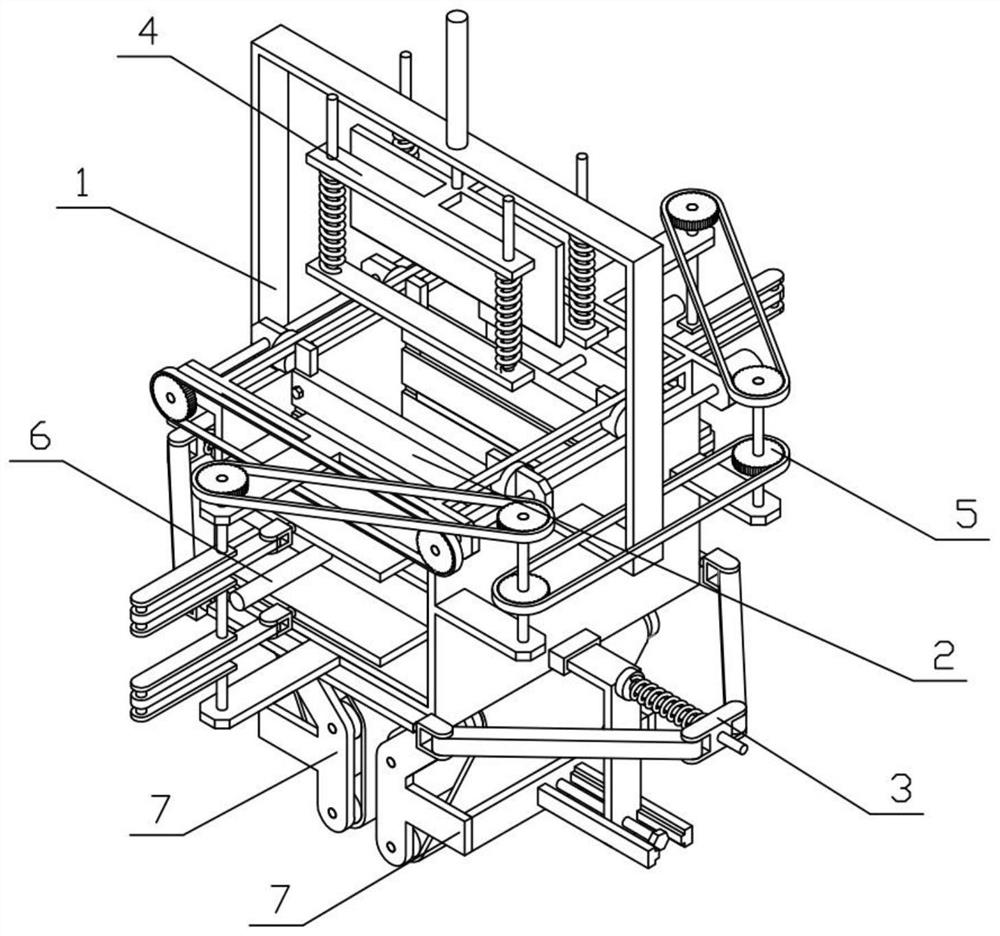
图1是本发明的狗粮制备系统整体结构示意图一;
图2是本发明的狗粮制备系统整体结构示意图二;
图3是本发明的装置支架结构示意图;
图4是本发明的夹紧机构结构示意图;
图5是本发明的闭合机构结构示意图;
图6是本发明的切割机构结构示意图;
图7是本发明的扶正机构结构示意图;
图8是本发明的支撑机构结构示意图;
图9是本发明的出料机构结构示意图。
图中:装置支架1;侧挡板101;滑动槽102;安装支架103;连接支架104;夹紧机构2;底部挡板201;滑动支板202;滑动挡板203;夹紧电机204;夹紧螺纹杆205;闭合机构3;闭合底板301;闭合滑块302;闭合连杆303;切割机构4;伸缩机构Ⅰ401;切割支架402;切割刀具403;切割压板404;扶正机构5;扶正电机501;扶正曲轴Ⅰ502;传动机构503;扶正曲轴Ⅱ504;扶正推板505;扶正连杆506;支撑机构6;伸缩机构Ⅱ601;支撑底板602;出料机构7;出料支架701;出料侧板702;出料带703;调整螺纹杆704。
具体实施方式
下面结合附图对本发明作进一步详细说明。
在本发明的描述中,需要说明的是,术语“中心”、“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“顶”、“底”、“内”、“外”和“竖着”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
在本发明的描述中,需要说明的是,除非另有明确规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接可以是直接连接,亦可以是通过中间媒介间接连接,可以是两个部件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
此外,在本发明的描述中,除非另有说明,“多个”、“多组”、“多根”的含义是两个或两个以上。
具体实施方式一:
下面结合图1至9说明本实施方式,一种狗粮制备系统,包括装置支架1、夹紧机构2、闭合机构3、切割机构4和扶正机构5,所述装置支架1内连接有夹紧机构2,装置支架1的底部设置有闭合机构3,装置支架1的上端固定连接有切割机构4,装置支架1上连接有扶正机构5;可以根据骨头的大致长度调整夹紧机构2,使得夹紧机构2可以对骨棒的前后两侧进行挤压,扶正机构5对装置内的多根骨头中可能存在的倾斜的骨头进行上下扶正,保证骨头不会处于竖直状态的倾斜状态,支撑机构6插入和扶正机构5配合对多个骨头的两端进行硬支撑,切割机构4对骨头的中部进行切割。
具体实施方式二:
下面结合图1至9说明本实施方式,本实施方式对实施方式一作进一步说明,所述装置支架1包括侧挡板101、滑动槽102、安装支架103和连接支架104,侧挡板101设置有两个,两个侧挡板101的下端均设置有滑动槽102,两个侧挡板101的外侧均固定连接有安装支架103,两个侧挡板101的上端之间固定连接有连接支架104。
具体实施方式三:
下面结合图1至9说明本实施方式,本实施方式对实施方式二作进一步说明,所述夹紧机构2包括底部挡板201、滑动支板202、滑动挡板203、夹紧电机204和夹紧螺纹杆205,底部挡板201设置有两个,两个底部挡板201均滑动连接在两个侧挡板101之间,两个底部挡板201上均固定连接有两个滑动支板202,两侧的两个滑动支板202之间均滑动连接有四个滑动挡板203,每个滑动挡板203上均设置有定位钉,夹紧电机204固定连接在一侧的侧挡板101上,夹紧螺纹杆205转动连接在另一侧的侧挡板101上,夹紧螺纹杆205和夹紧电机204的输出轴传动连接,位于夹紧螺纹杆205一侧的两个滑动支板202均通过螺纹连接在夹紧螺纹杆205上,夹紧螺纹杆205两端的螺纹旋向相反,两侧的四个滑动挡板203之间分别形成三个插槽;使用时根据要切割的骨棒的最大外直径设置滑动挡板203的宽度,如骨棒的关节处为骨棒的外直径最大处,因此滑动挡板203的宽度只要略大于骨棒的外直径最大处即可,滑动挡板203的宽度设置有不同的型号,如图4所示,滑动挡板203上设置有定位钉,可以根据不同的使用需求调整滑动挡板203的高度和位置,并通过定位钉对其进行定位,同理伸缩机构Ⅱ601上也设置有定位钉,也可以在调整滑动挡板203后,在进行伸缩机构Ⅱ601的高度调整,并通过定位钉对其进行定位,保证支撑底板602可以插入两个滑动挡板203之间,启动夹紧电机204,夹紧电机204的输出轴开始转动,夹紧电机204的输出轴带动夹紧螺纹杆205进行转动,夹紧螺纹杆205转动时通过螺纹带动两个底部挡板201相互靠近或者远离,调整两侧的四个滑动挡板203之间的相对距离,根据骨棒的长度调整两侧的滑动挡板203之间的相对距离,即两侧的滑动挡板203之间的相对距离略大于骨棒的长度即可。
具体实施方式四:
下面结合图1至9说明本实施方式,本实施方式对实施方式三作进一步说明,所述闭合机构3包括闭合底板301、闭合滑块302和闭合连杆303,闭合底板301设置有两个,闭合滑块302设置有两个,两个闭合滑块302分别滑动连接在两个安装支架103上,两个闭合底板301均滑动连接在两个滑动槽102之间,两个闭合底板301和两个闭合滑块302之间均铰接有闭合连杆303,闭合滑块302和安装支架103之间固定连接有压缩弹簧Ⅰ;加工完成后,推动闭合滑块302,闭合滑块302带动闭合连杆303进行运动,闭合连杆303带动闭合底板301进行运动,两个闭合底板301相互分离,切割完成的骨棒掉落在出料机构7内。
具体实施方式五:
下面结合图1至9说明本实施方式,本实施方式对实施方式四作进一步说明,所述切割机构4包括伸缩机构Ⅰ401、切割支架402、切割刀具403和切割压板404,伸缩机构Ⅰ401的伸缩端固定连接有切割支架402,切割支架402上固定连接有切割刀具403,切割支架402上滑动连接有两个切割压板404,两个切割压板404和切割支架402之间均固定连接有压缩弹簧Ⅱ,两个切割压板404分别位于切割刀具403的两侧;启动伸缩机构Ⅰ401,伸缩机构Ⅰ401的伸缩端带动切割支架402向下进行运动,切割支架402带动切割刀具403和切割压板404向下进行运动,切割压板404对上侧的骨棒进行挤压,切割刀具403对多根骨棒进行切割。
具体实施方式六:
下面结合图1至9说明本实施方式,本实施方式对实施方式五作进一步说明,所述扶正机构5包括扶正电机501、扶正曲轴Ⅰ502、传动机构503、扶正曲轴Ⅱ504、扶正推板505和扶正连杆506,扶正电机501固定连接在两个侧挡板101的后端之间,扶正电机501的输出轴上固定连接有扶正曲轴Ⅰ502,传动机构503转动连接在位于右侧的侧挡板101上,扶正曲轴Ⅰ502和传动机构503传动连接,扶正曲轴Ⅱ504转动连接在两个侧挡板101的前端之间,传动机构503和扶正曲轴Ⅱ504传动连接,扶正推板505设置三个,三个扶正推板505分别滑动连接在两侧四个滑动挡板203之间形成的插槽内,其中两个扶正推板505滑动连接在位于前端上下两侧的两个插槽内,另一个扶正推板505滑动连接在位于后端中部的一个插槽内,三个扶正推板505上均铰接有扶正连杆506,其中两个扶正连杆506滑动连接在扶正曲轴Ⅱ504的偏心处,另一个扶正连杆506滑动连接在扶正曲轴Ⅰ502的偏心处;由于扶正连杆506是滑动连接在扶正曲轴Ⅰ502和扶正曲轴Ⅱ504的偏心处,因此在调整滑动挡板203的高度时,对应的扶正推板505的高度也可以进行调整,并不会影响,启动扶正电机501,扶正电机501的输出轴开的转动,扶正电机501的输出轴带动传动机构503进行转动,传动机构503带动扶正曲轴Ⅱ504进行转动,扶正曲轴Ⅱ504和扶正曲轴Ⅰ502同时进行运动,如图7所示,两侧的扶正推板505相互靠近运动,两侧的扶正推板505相互错位设置,两侧的扶正推板505形成相对运动,两侧的扶正推板505在运动的过程中,将多个骨棒中可能存在的竖直倾斜的骨棒进行扶正,保证其没有竖直倾斜的,横向倾斜的并不能太影响切割的效果。
具体实施方式七:
下面结合图1至9说明本实施方式,本实施方式对实施方式六作进一步说明,所述狗粮制备系统还包括支撑机构6,支撑机构6包括伸缩机构Ⅱ601和支撑底板602,伸缩机构Ⅱ601的伸缩端固定连接有支撑底板602,支撑机构6设置有三个,其中一个伸缩机构Ⅱ601滑动连接在两个侧挡板101的前端之间,三个伸缩机构Ⅱ601上均连接有定位钉,另外两个伸缩机构Ⅱ601滑动连接在两个侧挡板101的后端之间,位于前端的支撑底板602滑动连接在位于前端中部的插槽内,位于后端的两个支撑底板602分别滑动连接在位于后端上下两侧的插槽内;扶正电机501的输出轴往复运动一个周期,需要注意的是,在扶正推板505运动到另一侧的极限位置时,会完全插入另一侧的插槽内,使得多个骨棒进行分层,在扶正推板505抽离时,同时启动伸缩机构Ⅱ601,伸缩机构Ⅱ601和伸缩机构Ⅰ401可以是液压缸或者电动推杆,伸缩机构Ⅱ601的伸缩端进行运动,伸缩机构Ⅱ601的伸缩端带动支撑底板602进行运动,支撑底板602和扶正推板505一起进行运动,支撑底板602插入对应的两个滑动挡板203,在扶正推板505还没有抽离两个滑动挡板203之间时,扶正推板505停止运动,使得扶正推板505对骨棒的前后两端进行支撑,支撑底板602和扶正推板505加一起共六个,可以完成多每一层骨棒的两端进行支撑,保证骨棒在切割时的切割效果。
具体实施方式八:
下面结合图1至9说明本实施方式,本实施方式对实施方式七作进一步说明,所述狗粮制备系统还包括出料机构7,出料机构7包括出料支架701、出料侧板702、出料带703和调整螺纹杆704,出料支架701的前后两侧均固定连接有出料侧板702,两个出料侧板702之间转动连接有三个出料轮,三个出料轮之间通过出料带703传动连接,调整螺纹杆704转动连接在出料支架701上,出料机构7设置有两个,两个出料支架701分别滑动连接在两个安装支架103上,两个调整螺纹杆704分别通过螺纹连接在两个安装支架103上;如图9所示,出料侧板702的上端倾斜设置,出料轮在进行转动时可以带动出料带703进行运动,将加工完成的骨棒送出装置,同时转动调整螺纹杆704可以调整两个出料机构7之间的相对距离,出料轮可以用伺服电机进行控制,控制出料轮的转动,即控制出料的多少和停顿,进而控制出料量。
一种狗粮制备的方法,所述该方法包括以下步骤:
S1;预先根据骨头的长度调整两个底部挡板201之间的相对距离,将多根骨头放置在两侧的四个滑动挡板203之间;
S2;启动扶正机构5,扶正机构5对两个侧挡板101之间和两侧的四个滑动挡板203之间的多根骨头进行扶正;
S3;启动切割机构4,切割机构4对多根骨头的中部进行切割处理。
一种狗粮,所述狗粮由以下重量份的原料制成:改性玉米淀粉50至60份、畜禽肝脏18至28份、冻干猪肉10至20份、鱼肉12至22份、鸡蛋5至10份、骨头棒10至15份、食盐1至2份和植物油2至3份。
本发明的一种狗粮及其制备系统与方法,其工作原理为:
使用时将需要进行切割处理的多个骨棒均倒入装置内,预先根据要切割的骨棒的最大外直径设置滑动挡板203的宽度,如骨棒的关节处为骨棒的外直径最大处,因此滑动挡板203的宽度只要略大于骨棒的外直径最大处即可,滑动挡板203的宽度设置有不同的型号,如图4所示,滑动挡板203上设置有定位钉,可以根据不同的使用需求调整滑动挡板203的高度和位置,并通过定位钉对其进行定位,同理伸缩机构Ⅱ601上也设置有定位钉,也可以在调整滑动挡板203后,在进行伸缩机构Ⅱ601的高度调整,并通过定位钉对其进行定位,保证支撑底板602可以插入两个滑动挡板203之间,启动夹紧电机204,夹紧电机204的输出轴开始转动,夹紧电机204的输出轴带动夹紧螺纹杆205进行转动,夹紧螺纹杆205转动时通过螺纹带动两个底部挡板201相互靠近或者远离,调整两侧的四个滑动挡板203之间的相对距离,根据骨棒的长度调整两侧的滑动挡板203之间的相对距离,即两侧的滑动挡板203之间的相对距离略大于骨棒的长度即可;由于扶正连杆506是滑动连接在扶正曲轴Ⅰ502和扶正曲轴Ⅱ504的偏心处,因此在调整滑动挡板203的高度时,对应的扶正推板505的高度也可以进行调整,并不会影响,启动扶正电机501,扶正电机501的输出轴开的转动,扶正电机501的输出轴带动传动机构503进行转动,传动机构503带动扶正曲轴Ⅱ504进行转动,扶正曲轴Ⅱ504和扶正曲轴Ⅰ502同时进行运动,如图7所示,两侧的扶正推板505相互靠近运动,两侧的扶正推板505相互错位设置,两侧的扶正推板505形成相对运动,两侧的扶正推板505在运动的过程中,将多个骨棒中可能存在的竖直倾斜的骨棒进行扶正,保证其没有竖直倾斜的,横向倾斜的并不能太影响切割的效果;扶正电机501的输出轴往复运动一个周期,需要注意的是,在扶正推板505运动到另一侧的极限位置时,会完全插入另一侧的插槽内,使得多个骨棒进行分层,在扶正推板505抽离时,同时启动伸缩机构Ⅱ601,伸缩机构Ⅱ601和伸缩机构Ⅰ401可以是液压缸或者电动推杆,伸缩机构Ⅱ601的伸缩端进行运动,伸缩机构Ⅱ601的伸缩端带动支撑底板602进行运动,支撑底板602和扶正推板505一起进行运动,支撑底板602插入对应的两个滑动挡板203,在扶正推板505还没有抽离两个滑动挡板203之间时,扶正推板505停止运动,使得扶正推板505对骨棒的前后两端进行支撑,支撑底板602和扶正推板505加一起共六个,可以完成多每一层骨棒的两端进行支撑,保证骨棒在切割时的切割效果;启动伸缩机构Ⅰ401,伸缩机构Ⅰ401的伸缩端带动切割支架402向下进行运动,切割支架402带动切割刀具403和切割压板404向下进行运动,切割压板404对上侧的骨棒进行挤压,切割刀具403对多根骨棒进行切割;加工完成后,推动闭合滑块302,闭合滑块302带动闭合连杆303进行运动,闭合连杆303带动闭合底板301进行运动,两个闭合底板301相互分离,切割完成的骨棒掉落在出料机构7内;如图9所示,出料侧板702的上端倾斜设置,出料轮在进行转动时可以带动出料带703进行运动,将加工完成的骨棒送出装置,同时转动调整螺纹杆704可以调整两个出料机构7之间的相对距离,出料轮可以用伺服电机进行控制,控制出料轮的转动,即控制出料的多少和停顿,进而控制出料量。
当然,上述说明并非对本发明的限制,本发明也不仅限于上述举例,本技术领域的普通技术人员在本发明的实质范围内所做出的变化、改型、添加或替换,也属于本发明的保护范围。
- 一种狗粮及其制备系统与方法
- 一种用于提高宠物狗免疫力的狗粮及制备方法