一种夹爪驱动结构
文献发布时间:2023-06-19 10:03:37
技术领域
本发明涉及夹具,尤其是涉及一种夹爪驱动结构。
背景技术
在项目中当物料为载板时,一般使用开合夹爪夹取载板,在轨道上拖动,让载板到达轨道上不同的工位。夹爪通常通过步进马达旋转或直线电机上下做开合动作来实现夹持或放松。但步进马达的尺寸较大、结构较重、接线多、成本高;直线电机也存在相同的问题。
发明内容
为了克服现有技术的不足,本发明的目的在于提供一种尺寸小、结构简单、重量轻、接线少、成本低的夹爪驱动结构。
本发明的目的采用以下技术方案实现:
一种夹爪驱动结构,包括底板以及固定安装于所述底板的驱动件,所述夹爪驱动结构还包括偏心结构、下夹爪组件以及上夹爪组件,所述偏心结构固定安装于所述驱动件的输出轴,所述下夹爪组件以及所述上夹爪组件分别与所述偏心结构抵触并弹性连接,所述下夹爪组件滑动安装于所述底板,所述下夹爪组件与所述上夹爪组件滑动连接,所述驱动件带动所述偏心结构转动,所述偏心结构使所述下夹爪组件以及所述上夹爪组件在竖直方向移动实现夹爪开合及夹紧。
进一步地,所述偏心结构包括第一凸轮以及第二凸轮,所述第一凸轮与所述第二凸轮固定连接,所述下夹爪组件与所述上夹爪组件分别与所述第一凸轮以及所述第二凸轮抵触。
进一步地,所述偏心结构为两固定连接的偏心轮,所述下夹爪组件与所述上夹爪组件分别与两偏心轮抵触。
进一步地,所述下夹爪组件包括下主体、下滚轮以及下夹板,所述下夹板固定于所述下主体,所述下滚轮转动安装于所述下主体,所述下滚轮与所述偏心结构抵触使所述下夹爪组件与所述偏心结构滚动接触。
进一步地,所述上夹爪组件包括上主体、上滚轮以及上夹板,所述上夹板固定于所述上主体,所述上滚轮转动安装于所述上主体,所述上滚轮与所述偏心结构抵触使所述上夹爪组件与所述偏心结构滚动接触。
进一步地,所述夹爪驱动结构还包括第一弹性件,所述第一弹性件一端与所述上夹爪组件固定,另一端与所述底板固定,使所述上夹爪组件与所述偏心结构弹性连接。
进一步地,所述第一弹性件为弹簧。
进一步地,所述夹爪驱动结构还包括第二弹性件,所述第二弹性件固定于所述底板,所述第二弹性件端部与所述下夹爪组件抵触使所述下夹爪组件与所述偏心结构弹性连接。
进一步地,所述第二弹性件为弹片。
进一步地,所述夹爪驱动结构还包括交叉滚子轴承,所述交叉滚子轴承安装于所述下夹爪组件与所述上夹爪组件之间,使所述下夹爪组件与所述上夹爪组件滑动连接。
相比现有技术,本发明夹爪驱动结构的偏心结构固定安装于驱动件的输出轴,下夹爪组件以及上夹爪组件分别与偏心结构抵触并弹性连接,下夹爪组件滑动安装于底板,下夹爪组件与上夹爪组件滑动连接,驱动件带动偏心结构转动,偏心结构使下夹爪组件以及上夹爪组件在竖直方向移动实现夹爪开合及夹紧,通过上述设计,夹爪驱动结构尺寸小、结构简单、重量轻、接线少、成本低。
附图说明
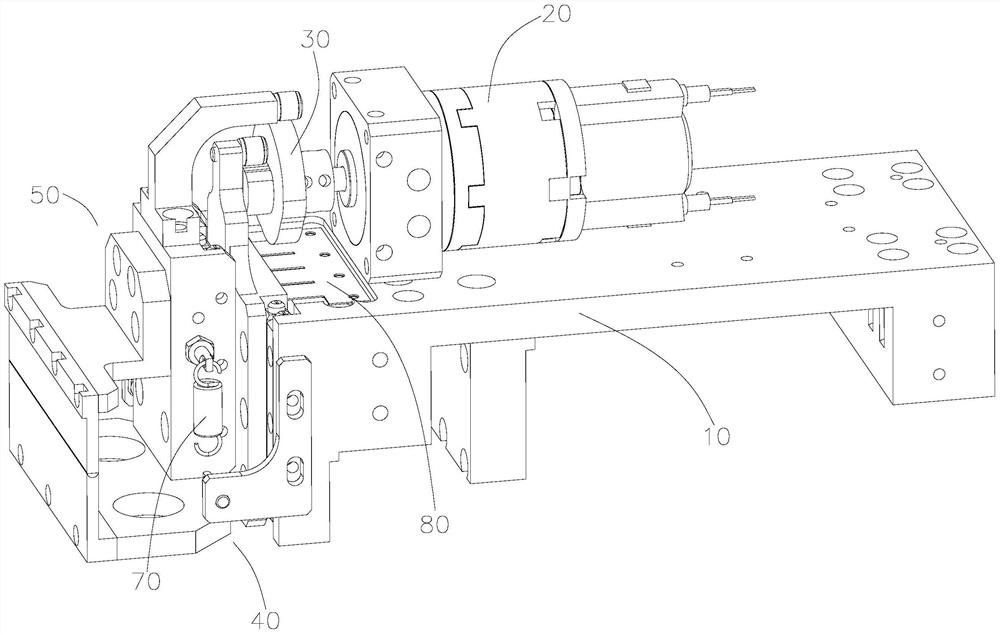
图1为本发明夹爪驱动结构的立体图;
图2为图1的夹爪驱动结构的局部结构立体图;
图3为图2的夹爪驱动结构的局部结构分解图。
图中:10、底板;20、驱动件;30、偏心结构;31、第一凸轮;32、第二凸轮;40、下夹爪组件;41、下主体;42、下滚轮;43、下夹板;50、上夹爪组件;51、上主体;52、上滚轮;53、上夹板;60、交叉滚子轴承;70、第一弹性件;80、第二弹性件;90、安装板。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
需要说明的是,当组件被称为“固定于”另一个组件,它可以直接在另一个组件上或者也可以存在另一中间组件,通过中间组件固定。当一个组件被认为是“连接”另一个组件,它可以是直接连接到另一个组件或者可能同时存在另一中间组件。当一个组件被认为是“设置于”另一个组件,它可以是直接设置在另一个组件上或者可能同时存在另一中间组件。本文所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的。
除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在本发明的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本发明。本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
请参阅图1至图3,本发明夹爪驱动结构包括底板10、驱动件20、偏心结构30、下夹爪组件40、上夹爪组件50、交叉滚子轴承60、第一弹性件70、第二弹性件80以及安装板90。
驱动件20为旋转气缸。
偏心结构30为凸轮组合或偏心轮组合。当偏心结构30为凸轮组合时,偏心结构30包括第一凸轮31以及第二凸轮32。第一凸轮31以及第二凸轮32固定连接。偏心结构30为偏心轮组合时,偏心结构30包括两偏心轮,两偏心轮固定连接。
下夹爪组件40包括下主体41、下滚轮42以及下夹板43。下滚轮42转动安装于下主体41。下夹板43固定安装于下主体41。
上夹爪组件50包括上主体51、上滚轮52以及上夹板53。上滚轮52转动安装于上主体51。上夹板53固定于上主体51。
第一弹性件70为弹簧。第二弹性件80为弹片。
组装夹爪驱动结构时,驱动件20固定于底板10。偏心结构30固定于驱动件20的输出轴。安装板90固定于底板10的侧部。下夹爪组件40滑动安装于底板10。下夹爪组件40的下滚轮42位于第二凸轮32上。第二弹性件80固定于底板10,第二弹性件80的端部与下主体41抵触,使下夹爪组件40的下滚轮42与第二凸轮32保持紧密接触(即弹性连接)。交叉滚子轴承60安装于下夹爪组件40的下主体41,上夹爪组件50的上主体51通过交叉滚子轴承60与下夹爪组件40的下主体41滑动连接。上夹爪组件50的上滚轮52位于第一凸轮31上。第一弹性件70两端分别与上主体51以及安装板90固定连接,使上夹爪组件50的上滚轮52与第一凸轮31保持紧密接触(即弹性连接)。
使用夹爪驱动结构时,驱动件20旋转180°,带动第一凸轮31以及第二凸轮32转动。第一凸轮31转动使上夹爪组件50的上滚轮52一边转动一边带动上夹板53向上移动,第二凸轮32转动使下夹爪组件40的下滚轮42一边转动一边带动下夹板43向下移动,实现夹爪的张开。驱动件20反转则会使夹爪闭合。
通过上述设计,夹爪驱动结构尺寸小、结构简单、重量轻、接线少、成本低。
对本领域的技术人员来说,可根据以上描述的技术方案以及构思,做出其它各种相应的改变以及形变,而所有的这些改变以及形变都应该属于本发明权利要求的保护范围之内。
- 一种气缸通用夹爪结构及具有气缸通用夹爪结构的设备
- 一种夹爪驱动结构