一种汽车防撞系统及其使用方法
文献发布时间:2023-06-19 10:36:57
技术领域
本发明涉及一种汽车防撞系统及其使用方法,属于汽车零部件技术领域。
背景技术
为了提高车辆运行的安全性,当前在车辆上往往均配备了诸如摄像头、测距雷达中任意一种或两种共用的碰撞告警系统,同时为车辆配备了诸如保险杠、防撞垫块等辅助防撞设备,虽然可以一定程度降低车辆碰撞发生几率和降低碰撞时对车辆及被碰撞物造成的损害,但当前的防护系统或设备均无法根据车辆运行状态、障碍物状态等参数合理选择防碰撞车辆运行方案的同时,对发生碰撞时的冲击作用力的抵御能力相对较差,且适应范围及调节范围相对较差,难以有效对车辆及障碍物在碰撞时的冲击作用力进行合理分配及减震吸收,从而导致当前车辆在发生碰撞时往往车身受损严重,且易对车辆及被碰撞物造成不可控的损伤,从而在增加车辆碰撞造成的损害时,也极易因碰撞力过大而导致桥梁护栏、桥墩等发生损毁,从而引发二次损害发生。
因此针对这一需要,迫切需要开发一种全新的车辆防碰撞系统,以满足实际使用的需要。
发明内容
针对现有技术上存在的不足,本发明提供一种汽车防撞系统及其使用方法,以达到满足实际工作的需要。
为了实现上述目的,本发明是通过如下的技术方案来实现:
一种汽车防撞系统,包括承载底梁、弹性气囊、增压泵、压力传感器、气压传感器、缓冲梁、综合检测器及主控系统,其中所述承载底梁包括底板、托板、导向套、弹性伸缩杆,其中所述底板和托板均为横断面呈矩形的板状结构,且底板上端面与托板下端面垂直分布,并构成横断面“T”字形槽状结构的基座,所述基座至少两个,相邻两基座间通过弹性伸缩杆相互连接,并分布在同一与水平平行分布的平面内,所述综合检测器数量与基座一致,每个基座上端面均通过转台机构与一个综合检测器连接,且所述综合检测器轴线与水平面呈0°—60°夹角,所述导向套数量与基座数量一致,每个基座的底板下端面均通过转台机构与至少一个导向套铰接,且所述导向套轴线与底板前端面呈30°—90°夹角,导向套前端面与托板前端面平齐分布,所述弹性气囊嵌于导向套内与导向套同轴分布,且弹性气囊与导向套内表面滑动连接,所述弹性气囊前端面与缓冲梁连接,且所述缓冲梁后端面嵌于导向套内并与导向套滑动连接,前端面超出承载底座前端面至少5毫米,所述弹性气囊后端面与导向套后端面连接,并通过导气管与增压泵连通,所述增压泵与底板后端面连接,并通过多通阀与各导气管连接,所述压力传感器、气压传感器数量与弹性气囊一致,所述压力传感器嵌于弹性气囊与缓冲梁截面位置,分别与弹性气囊和缓冲梁连接并同轴分布,所述气压传感器位于弹性气囊与导气管连接位置,所述主控系统嵌于车辆控制电路中,并分别与增压泵、压力传感器、气压传感器、综合检测器、转台机构、多通阀及车辆行车电脑系统电气连接。
进一步的,所述的综合检测器包括三维位移台、检测头、透明防护罩、CCD摄像机、3D摄像头、辅助光源、测距仪、角度传感器、倾角传感器及驱动电路,所述检测头为轴向截面呈“凵”字形槽状结构,其下端面通过三维位移台与托板上端面连接,并与托板上端面垂直分布,所述CCD摄像机、3D摄像头和驱动电路嵌于检测头内并与检测头的槽底连接,且CCD摄像机、3D摄像头光轴相互平行分布,所述透明防护罩包覆在检测头上端面外,与检测头构成密闭腔体结构,所述辅助光源、测距仪嵌于检测头外侧面,其轴线与CCD摄像机、3D摄像头轴线相交,且交点位于检测头前方至少50厘米处,所述角度传感器、倾角传感器均至少一个,其中角度传感器与三维位移台连接,倾角传感器与检测头下端面连接,所述驱动电路分别与三维位移台、CCD摄像机、3D摄像头、辅助光源、测距仪、角度传感器、倾角传感器及主控系统电气连接。
进一步的,所述的驱动电路为基于DSP及FPGA芯片中任意一种为基础的电路系统。
进一步的,所述的缓冲梁包括承载弹簧、承载龙骨、硬质防护罩、弹性垫块、弹性铰链,所述承载弹簧嵌于导向套内,并与导向套侧壁滑动连接,承载弹簧后端面通过压力传感器与弹性气囊连接,前端面通过弹性铰链与承载龙骨后端面铰接,所述承载龙骨为横断面呈矩形的板状框架结构,所述弹性垫块若干,各弹性垫块沿承载龙骨轴线方向均布在承载龙骨前端面及侧表面,所述硬质防护罩为横断面呈“凵”字形槽状结构,包覆在承载龙骨前端面外,并与承载龙骨之间构成间距不小于10毫米的形变腔体,所述硬质防护罩后端面通过弹性垫块与承载龙骨侧表面连接。
进一步的,所述的硬质防护罩为圆弧结构及直线结构中任意一种的槽状结构,且所述硬质防护罩内表面设若干沿硬质防护罩轴线方向均布的预应力槽,所述预应力槽为正多边形网状结构,深度为硬质防护罩厚度的1/4—1/2。
进一步的,所述的弹性垫块中,位于承载龙骨侧表面的弹性垫块通过弹性铰链分别与承载龙骨及硬质防护罩铰接。
所述的主控系统为基于AI人工智能为基础的电路系统,且所述主控系统另设基于BP神经网络的数据处理系统。
一种汽车防撞系统的使用方法,包括如下步骤;
S1,系统装配,首先根据车辆结构,将本发明的主控系统与车辆控制电路间电气连接,并与车辆控制系统间建立数据连接,根据车身结构,将构成本发明的承载底梁、弹性气囊、增压泵、压力传感器、气压传感器、缓冲梁、综合检测器进行组装,并通过承载底梁安装到车身指定位置,并使本发明的缓冲梁超出车身至少5毫米,即可完成本发明装配;
S2,防撞检测,完成S1步骤后本发明即可随车运行同步实现防撞防护,在车辆运行中,首先由主控系统采集车辆载重、车速数据及路况数据,然后对数据进行分析运算,一方面获得当前车辆运行状态下对车辆碰撞防护作用力,另一方面根据路况计算车辆碰撞对障碍物防护作用力;最后根据车辆碰撞防护作用力和障碍物防护作用力进行汇总,并得到损失最小的最佳碰撞作防护用力,从而完成防撞检测作业;
S3,碰撞防护,在S2步骤后当车辆正常运行时,首先驱动增压泵运行,对各弹性气囊进行增压,使弹性气囊那压力与S2步骤计算的车辆碰撞防护作用力保持一致,同时通过综合检测器对车辆与障碍物间间距及类型进行同步识别判断,同时对碰撞几率进行同步判断,并在碰撞几率大于50%时,根据障碍物类型及路况,由增压泵对弹性气囊压力进行修正,满足最佳碰撞作防护用力的需要,从而完成主动碰撞防护作业;并在碰撞发生时,一方面在碰撞作用力驱动下,由缓冲梁通过硬质防护罩破碎、弹性垫块和承载弹簧溃缩,达到对碰撞作用力初步吸收;另一方面通过弹性气囊受力弹性溃缩形变,并同步进行排气减压,进一步对碰撞作用力进行吸收,从而达到防碰撞防护作业的目的。
进一步的,所述S2步骤中,在进行最佳碰撞作防护用力运算时:
当碰撞障碍物为路障、普通建筑、岩石等障碍物时,以提高车辆防护效果为计算基准;
当碰撞障碍物物为行人及桥梁护栏、桥墩等重要建筑结构是,以保护障碍物为计算基准;
当碰撞障碍物为车辆时,以两碰撞车辆对碰撞作用力平均分配为计算基准。
本发明系统构成结构简单,使用灵活方便,通用性好,工作效率高,一方面可有效满足各类不同车辆在复杂路况运行状态下进行碰撞防护作业的需要;另一方面具有良好的数据处理能力,可在碰撞中有效的提高碰撞事故对车辆及周边环境造成损害,从而极大的提高了车辆运行的安全性和可靠性。
附图说明
下面结合附图和具体实施方式来详细说明本发明。
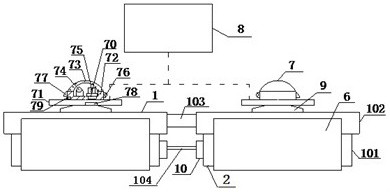
图1为本发明结构示意图;
图2为缓冲梁横断面及相关组件结构示意图;
图3为本发明使用方法流程图。
图中各标号:承载底梁1、弹性气囊2、增压泵3、压力传感器4、气压传感器5、缓冲梁6、综合检测器7、主控系统8、底板101、托板102、导向套103、弹性伸缩杆104、三维位移台71、检测头72、透明防护罩73、CCD摄像机74、3D摄像头75、辅助光源76、测距仪77、角度传感器78、倾角传感器79、驱动电路70、承载弹簧61、承载龙骨62、硬质防护罩63、弹性垫块64、弹性铰链65、预应力槽66。
具体实施方式
为使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本发明。
如图1和2所示,一种汽车防撞系统,包括承载底梁1、弹性气囊2、增压泵3、压力传感器4、气压传感器5、缓冲梁6、综合检测器7及主控系统8,其中承载底梁1包括底板101、托板102、导向套103、弹性伸缩杆104,其中所述底板101和托板102均为横断面呈矩形的板状结构,且底板101上端面与托板102下端面垂直分布,并构成横断面“T”字形槽状结构的基座,基座至少两个,相邻两基座间通过弹性伸缩杆104相互连接,并分布在同一与水平平行分布的平面内,综合检测器7数量与基座一致,每个基座上端面均通过转台机构9与一个综合检测器7连接,且综合检测器7轴线与水平面呈0°—60°夹角,导向套103数量与基座数量一致,每个基座的底板101下端面均通过转台机构9与至少一个导向套103铰接,且导向套103轴线与底板101前端面呈30°—90°夹角,导向套103前端面与托板102前端面平齐分布,所述弹性气囊2嵌于导向套103内与导向套103同轴分布,且弹性气囊2与导向套103内表面滑动连接,所述弹性气囊2前端面与缓冲梁6连接,且所述缓冲梁6后端面嵌于导向套103内并与导向套103滑动连接,前端面超出承载底座1前端面至少5毫米,弹性气囊2后端面与导向套103后端面连接,并通过导气管与增压泵3连通,增压泵3与底板101后端面连接,并通过多通阀10与各导气管连接,压力传感器4、气压传感器5数量与弹性气囊2一致,压力传感器4嵌于弹性气囊2与缓冲梁6截面位置,分别与弹性气囊2和缓冲梁6连接并同轴分布,气压传感器5位于弹性气囊2与导气管连接位置,主控系统8嵌于车辆控制电路中,并分别与增压泵3、压力传感器4、气压传感器5、综合检测器7、转台机构9、多通阀10及车辆行车电脑系统电气连接。
本实施例中,所述的综合检测器7包括三维位移台71、检测头72、透明防护罩73、CCD摄像机74、3D摄像头75、辅助光源76、测距仪77、角度传感器78、倾角传感器79及驱动电路70,所述检测头72为轴向截面呈“凵”字形槽状结构,其下端面通过三维位移台71与托板102上端面连接,并与托板102上端面垂直分布,所述CCD摄像机74、3D摄像头75和驱动电路70嵌于检测头72内并与检测头72的槽底连接,且CCD摄像机74、3D摄像头75光轴相互平行分布,所述透明防护罩73包覆在检测头72上端面外,与检测头72构成密闭腔体结构,所述辅助光源76、测距仪77嵌于检测头72外侧面,其轴线与CCD摄像机74、3D摄像头75轴线相交,且交点位于检测头72前方至少50厘米处,所述角度传感器78、倾角传感器79均至少一个,其中角度传感器78与三维位移台71连接,倾角传感器79与检测头72下端面连接,所述驱动电路70分别与三维位移台71、CCD摄像机74、3D摄像头75、辅助光源76、测距仪77、角度传感器78、倾角传感器79及主控系统8电气连接。
进一步优化的,所述的驱动电路70为基于DSP及FPGA芯片中任意一种为基础的电路系统。
值得注意的,所述的缓冲梁6包括承载弹簧61、承载龙骨62、硬质防护罩63、弹性垫块64、弹性铰链65,所述承载弹簧61嵌于导向套103内,并与导向套103侧壁滑动连接,承载弹簧61后端面通过压力传感器4与弹性气囊2连接,前端面通过弹性铰链65与承载龙骨62后端面铰接,所述承载龙骨62为横断面呈矩形的板状框架结构,所述弹性垫块64若干,各弹性垫块64沿承载龙骨62轴线方向均布在承载龙骨62前端面及侧表面,所述硬质防护罩63为横断面呈“凵”字形槽状结构,包覆在承载龙骨62前端面外,并与承载龙骨62之间构成间距不小于10毫米的形变腔体,所述硬质防护罩63后端面通过弹性垫块64与承载龙骨62侧表面连接。
同时,所述的硬质防护罩63为圆弧结构及直线结构中任意一种的槽状结构,且所述硬质防护罩63内表面设若干沿硬质防护罩63轴线方向均布的预应力槽66,所述预应力槽66为正多边形网状结构,深度为硬质防护罩63厚度的1/4—1/2。
此外,所述的弹性垫块64中,位于承载龙骨62侧表面的弹性垫块64通过弹性铰链65分别与承载龙骨62及硬质防护罩63铰接。
所述的主控系统8为基于AI人工智能为基础的电路系统,且所述主控系统8另设基于BP神经网络的数据处理系统。
如图3所示,一种汽车防撞系统的使用方法包括如下步骤;
S1,系统装配,首先根据车辆结构,将本发明的主控系统8与车辆控制电路间电气连接,并与车辆控制系统间建立数据连接,根据车身结构,将构成本发明的承载底梁1、弹性气囊2、增压泵3、压力传感器4、气压传感器5、缓冲梁6、综合检测器7进行组装,并通过承载底梁1安装到车身指定位置,并使本发明的缓冲梁6超出车身至少5毫米,即可完成本发明装配;
S2,防撞检测,完成S1步骤后本发明即可随车运行同步实现防撞防护,在车辆运行中,首先由主控系统8采集车辆载重、车速数据及路况数据,然后对数据进行分析运算,一方面获得当前车辆运行状态下对车辆碰撞防护作用力,另一方面根据路况计算车辆碰撞对障碍物防护作用力;最后根据车辆碰撞防护作用力和障碍物防护作用力进行汇总,并得到损失最小的最佳碰撞作防护用力,从而完成防撞检测作业;
S3,碰撞防护,在S2步骤后当车辆正常运行时,首先驱动增压泵3运行,对各弹性气囊2进行增压,使弹性气囊2那压力与S2步骤计算的车辆碰撞防护作用力保持一致,同时通过综合检测器7对车辆与障碍物间间距及类型进行同步识别判断,同时对碰撞几率进行同步判断,并在碰撞几率大于50%时,根据障碍物类型及路况,由增压泵3对弹性气囊2压力进行修正,满足最佳碰撞作防护用力的需要,从而完成主动碰撞防护作业;并在碰撞发生时,一方面在碰撞作用力驱动下,由缓冲梁6通过硬质防护罩63破碎、弹性垫块64和承载弹簧61溃缩,达到对碰撞作用力初步吸收;另一方面通过弹性气囊2受力弹性溃缩形变,并同步进行排气减压,进一步对碰撞作用力进行吸收,从而达到防碰撞防护作业的目的。
进一步的,所述S2步骤中,在进行最佳碰撞作防护用力运算时:
当碰撞障碍物为路障、普通建筑、岩石等障碍物时,以提高车辆防护效果为计算基准;
当碰撞障碍物物为行人及桥梁护栏、桥墩等重要建筑结构是,以保护障碍物为计算基准;
当碰撞障碍物为车辆时,以两碰撞车辆对碰撞作用力平均分配为计算基准。
本发明系统构成结构简单,使用灵活方便,通用性好,工作效率高,一方面可有效满足各类不同车辆在复杂路况运行状态下进行碰撞防护作业的需要;另一方面具有良好的数据处理能力,可在碰撞中有效的提高碰撞事故对车辆及周边环境造成损害,从而极大的提高了车辆运行的安全性和可靠性。
本行业的技术人员应该了解,本发明不受上述实施例的限制。上述实施例和说明书中描述的只是说明本发明的原理。在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进。这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
- 一种汽车防撞系统及其使用方法
- 汽车防撞系统及其使用方法