一种多功能动态可控的高速公路主动发光视线诱导系统
文献发布时间:2023-06-19 10:38:35
技术领域
本发明涉及高速公路交通安全设施与交通监控技术领域,尤其涉及一种多功能动态可控的高速公路主动发光视线诱导系统。
背景技术
高速公路是交通路网的重要组成部分,其管理和服务水平直接影响着高速公路的交通安全和运行效率。现有高速公路交通安全设施往往采用静态反光型的视线诱导设施,也有部分路段采用太阳能主动发光型的视线诱导设施,但一般只是根据昼夜环境亮度进行常暗、常亮或闪烁的发光状态控制,而无法进行进一步的动态控制。受高速公路行车环境多变、不同时空通行条件差异大、空间场景宽大、视觉环境单一等特点影响,静态的视线诱导设施无法有效适应多变的环境和条件。
因此,申请人针对当前高速公路的上述现状问题进行了研究,提出了一种多功能动态可控的高速公路主动发光视线诱导系统,对于提高高速公路警示诱导信息有效性、可达性以及辅助提高高速行车安全性都具有重要的意义和价值。
发明内容
为实现本发明之目的,采用以下技术方案予以实现:
一种多功能动态可控的高速公路主动发光视线诱导系统,包括安装在道路两侧的多个主动发光诱导装置、无线通信网络和上位系统,其中:上位系统通过无线通信网络向诱导装置发送控制信息并接收诱导装置的反馈信息;所述诱导装置包括主控模块、无线通信模块、卫星校时模块和发光模块,所述主控模块通过无线通信模块接收由上位系统发出的控制信息以控制发光模块的工作状态,卫星校时模块用于为诱导装置提供时间校准。
所述的主动发光视线诱导系统,其中:当路段视线环境与行车条件良好、交通运行正常无异常情况时,所述诱导装置的发光模块处于不发光状态。
所述的动发光视线诱导系统,其中:低能见度环境下,全体诱导系装置的主控模块根据卫星校时模块使所有诱导装置的发光模块同时开始闪烁,整体呈现黄色长亮或同步黄色闪烁状态。
所述的动发光视线诱导系统,其中:当高速公路发生事故或出现障碍物时,发生事故或出现障碍物的位置上游800m范围内连续设置的诱导装置的主控模块根据卫星校时模块控制发光模块以预定频率和占空比进行闪烁预警,其中发生事故或出现障碍物的位置上游0~ 300m范围内的所述诱导装置的发光模块进行红色闪烁警示,发生事故或出现障碍物的位置的上游300~800m范围内的所述诱导装置的发光模块进行黄色闪烁预警。
所述的动发光视线诱导系统,其中:饱和交通流量状态下,全体所述诱导系装置的主控模块根据卫星校时模块控制间隔预定距离的诱导装置的发光模块同时点亮,整体呈现黄色长亮状态,相邻的两个黄色灯点亮的发光模块之间即为安全行车车距。
所述的动发光视线诱导系统,其中:在对车流速度进行主动管控诱导时,将所述诱导系统的诱导装置划分为连续分布的多个分组,每个分组由连续设置的3个诱导装置组成;在每个所述分组内,诱导装置1距离车流方向最近,诱导装置3距离车流方向最远,诱导装置2 位于诱导装置1和诱导装置3之间,每个分组的三个诱导装置的发光模块按照指定时长依次亮暗且同一时刻同一个分组内只有一个发光模块处于点亮状态,即在时刻1点亮各分组内诱导装置1的发光模块并持续指定时长,时刻2、时刻3则依次切换为诱导装置2和诱导装置3点亮的状态,当时刻3状态结束后,则再次切换为时刻1状态,如此循环重复。
附图说明
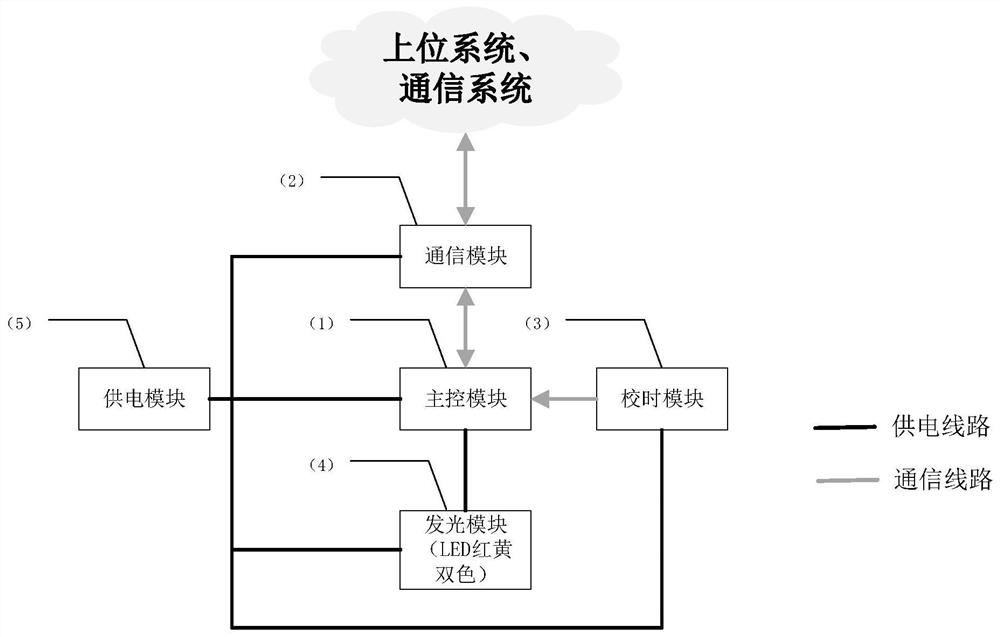
图1是多功能动态可控的高速公路主动发光视线诱导系统中诱导装置工作原理图;
图2是多功能动态可控的高速公路主动发光视线诱导系统工作方式一示意图;
图3是多功能动态可控的高速公路主动发光视线诱导系统工作方式二示意图;
图4是多功能动态可控的高速公路主动发光视线诱导系统工作方式三示意图;
图5是多功能动态可控的高速公路主动发光视线诱导系统工作方式四示意图;
图6是多功能动态可控的高速公路主动发光视线诱导系统工作方式五示意图。
具体实施方式
下面结合附图1-6对本发明的具体实施方式进行详细说明。
如图1所示,诱导装置包括主控模块、无线通信模块、卫星校时模块、发光模块和供电模块。更具体而言,所述的主控模块为嵌入式微处理器,可根据不同的场景需求,通过无线通信模块接收由上位系统发出的控制信号,控制发光模块的工作状态,包括常暗、纯色常亮、纯色闪烁频率、闪烁占空比、发光颜色、发光光强等。其中,发光模块为LED灯,其发光颜色分为红色、黄色两种;LED灯基准轴上的发光光强范围为不大于7000cd/m2;纯色闪速频率范围为30~180次/分钟;闪烁占空比(即亮灯时长与闪烁周期时长的比值)范围为1:2~ 1:4。供电模块用于为诱导装置供电,卫星校时模块用于为诱导装置提供时间校准。
更具体而言,所述的诱导装置安装时,发光模块发光面应面向交通流,其表面法线应与公路中心线成0°~15°的角度且以相同高度 (1.5~3m)、相同间距(25~50m)、均匀的布设安装在高速公路行车方向道路两侧边缘,且为能在高速公路行车视线方向远距离(300~ 500m)条件下清晰发现和视察的圆形、矩形面状LED发光源(圆形直径/矩形长宽不小于200mm)。
本发明的多功能动态可控的高速公路主动发光视线诱导系统,包括安装在单幅道路两侧的各M个主动发光诱导装置(M为大于或等于 20的整数)、可实时进行信息传输的无线通信网络、用于发布控制模式信息和接收诱导装置反馈信息的上位系统,所述反馈信息包括工作模式控制状态、每个诱导装置的工作状态、当前工作的模式等,这些数据有利于对诱导系统进行有效的管理。
多功能动态可控的高速公路主动发光视线诱导系统可通过控制所述诱导装置处于如下图2、图3、图4、图5、图6所示五种工作方式,且根据路侧监控设备(如摄像头、气象检测仪等)对路面环境、天气情况、交通异常事件严重程度的精准采集,由上位系统确认之后,自动对诱导装置的工作模式进行选择,并且及时通过无线通信网络向诱导装置发送控制信号,诱导装置的主控模块通过无线通信模块接收所述控制信号,并根据该控制信号决定发光模块的工作方式,实现不同道路环境下的多种诱导功能。
如图2所示,该工作方式下,所述诱导装置的发光模块处于不发光状态,即诱导装置处于关闭状态。所述工作方式主要适用于路段视线环境与行车条件良好、交通运行正常无异常情况时,该诱导系统处于关闭显示状态。所述状态具有提示驾驶人员安全通行的诱导功能。
如图3所示,该工作方式下,所述诱导装置的发光模块处于黄色显示状态或根据不同的能见度等级选择合适的频率(30~180次/分钟)与占空比(1:2~1:4)显示黄色闪烁状态,具体能见度、频率、占空比说明如表1所示。全体所述诱导系装置的主控模块根据卫星校时模块使所有诱导装置的发光模块同时开始闪烁,整体呈现黄色长亮或同步黄色闪烁状态。所述工作方式适用于雨雾天气等低能见度环境下,通过黄色长亮或闪烁的视觉刺激方式,改善视认和辨识条件,实现道路轮廓和边界强化的诱导功能,可诱导驾驶员安全行驶,以保证交通安全。
表1
如图4所示,在安装诱导装置的路段,一旦发生占道事件(如道路障碍物、占道施工、交通事件占道等)可以优先采用该工作方式,并在事件位置上游300m范围内连续设置的所述诱导装置发光模块 (4)按照占道的严重程度选择合适的频率(30~180次/分钟)与占空比(1:2~1:4)进行闪烁预警,具体说明见表,以高速公路为例,其中指定位置上游0~300m范围内的所述诱导装置发光模块(4)进行红色闪烁警示,指定位置上游300~800m范围内的所述诱导装置发光模块(4)进行黄色闪烁预警。全体所述诱导系装置的主控模块根据卫星校时模块使所有诱导装置的发光模块同时开始闪烁,整体呈现指定位置上游0~300m红色同步闪烁警示,指定位置上游300~800m 黄色同步闪烁预警,具体不同路段预警距离见表3。
表3
所述工作方式适用于发生道路洒落物、故障车辆、交通事故等影响交通安全的突发事件时,向事故或障碍物位置点上游来车发布交通警示灯光信号,通过“远黄近红”的渐进式同步闪烁方式,增强视觉刺激,实现驾驶人员注意远处危险预警,前方危险警示的诱导功能,防止追尾事故,诱导驾驶员安全行驶,以保证交通安全。
如图5所示,该工作方式下,相邻两个黄色灯点亮的所述诱导装置发光模块之间具有相同间隔(可根据高速公路限速等级间隔距离可以选择100~200m内的距离,具体说明参照表2),其余所述诱导装置发光模块均为关闭状态。全体所述诱导系装置的主控模块根据卫星校时模块使间隔预定距离的诱导装置的发光模块同时点亮,整体呈现黄色长亮状态,相邻的两个黄色灯点亮的发光模块之间即为安全行车车距。所述工作方式适用于路段流量较大、车速在大于60km/h的饱和交通流量状态下,通过黄色常亮的发光点视觉刺激方式,实现车辆与前车距离路侧参考,驾驶人员安全车距确认辅助的诱导功能,诱导车辆保持安全行车车距,以保证交通安全。
表2
如图6所示,该工作方式下,所述诱导系统的诱导装置被划分为连续分布的多个分组,每个分组由连续设置的3个诱导装置组成。在每个所述分组内,诱导装置1、2、3根据其安装位置相对于车流方向的前后顺序(其中诱导装置1距离车流方向最近,诱导装置3距离车流方向最远,诱导装置2位于诱导装置1和诱导装置3之间),其发光模块根据道路限速值选择点亮时并控制分组内诱导装置依次亮暗 (且同一时刻同一个分组内只有一个发光模块处于点亮状态)。即在时刻1点亮各分组内诱导装置1的发光模块并持续指定时长。时刻2、时刻3则依次切换为诱导装置2和3点亮的状态。当时刻3状态结束后,则再次切换为时刻1状态,如此循环重复。从而使得整个诱导系统在视线上形成光亮点向前“自走式移动”的效果,且“移动的速度”可根据交通流最优车速进行动态控制(即可根据最优车速控制每个诱导装置的点亮时长,其范围为1s~3s)。
交通流最优车速的设置根据流量、密度、速度三者数学关系决定。
V——空间平均速度(km/h)
K——平均密度(辆/km)
Q——平均流量(辆/h)
V
K
1、流量与速度的关系
Q=K
K=K
速度、流量、密度三种之间互相影响,当速度越大时,车流密度越稀疏,速度越小时,车流密度越饱和;当车流密度基本饱和,车辆通过流量达到最大。流量与速度的关系近似于抛物线,在道路限速值一定的情况下,必然存在一个1/2限速点,此时速度稳定且流量最大,道路通行效率达到最大,单位时间内通过车辆最多,道路车流密度基本达到饱和,但是此刻的临界点极其不稳定,当速度突降和突增都会导致道路通行效率下降,无法达到速度、流量、密度三种全局最优的状态,所以我们推荐在低于和高于1/2限速值的20%时进行速度诱导,来提升道路通行效率。
所述工作方式适用于较长的上坡或下坡、较大曲率的弯道、路面一般冰雪、高饱和状态的交通流等需对车流速度进行主动管控诱导的不同场景下,通过路侧黄色光点向前的“自走式移动”视觉诱导方式,实现比“数字”更易感知、确认的路侧速度参考和交通流最优车速辅助确认,诱导车辆保持交通流最优车速,以提升道路通行能力,保障道路行车安全。
以上结合附图对本发明的实施例进行了描述,但本发明并不局限于上述的具体实施方式,上述的具体实施方式仅仅是示意性的,而不是限制性的,本领域的普通技术人员在本发明的启示下,在不脱离本发明宗旨和权利要求所保护的范围情况下,还可做出很多形式,这些均属于本发明的保护范围之内。
- 一种多功能动态可控的高速公路主动发光视线诱导系统
- 一种高速公路隧道平纵组合路段视线诱导系统