一种大跨度双向伸缩送料模组
文献发布时间:2023-06-19 11:05:16
技术领域
本发明涉及非标设备制造技术领域,尤其是一种大跨度双向伸缩送料模组。
背景技术
在非标自动化设备应用领域,送料模组在动力部的驱动力作用进行平移运动,以将待加工工件移载至加工工位。在现有技术中,工作半径直接由送料模组自身的长度来决定,从而导致送料模组的适用范围极为有限,例如:某产品生产线需要进行改型设计或加工工位相对位置发生改变时,需要相应地对送料模组的工作半径进行延长,此时,由于送料模组长度的固定不变的,唯一的方案为重新拆换长度延长后的送料模组。由上述叙述可知,一方面,上述改型操作十分费时费力,增加了产品线的等待时间;另一方面,重新制作新的送料模组需要投入大量的物力、人力成本。因而,亟待技术人员解决上述问题。
发明内容
故,本发明设计人员鉴于上述现有的问题以及缺陷,乃搜集相关资料,经由多方的评估及考量,并经过从事于此行业的多年研发经验技术人员的不断实验以及修改,最终导致该大跨度双向伸缩送料模组的出现。
为了解决上述技术问题,本发明涉及了一种大跨度双向伸缩送料模组,其包括有安装基板、一级滑移板、二级滑移板、三级滑移板、四级滑移板、第一滑轨滑块组件、第二滑轨滑块组件、第三滑轨滑块组件、第四滑轨滑块组件、一级皮带牵引单元、二级皮带牵引单元、三级皮带牵引单元以及动力部。安装基板、一级滑移板、二级滑移板、三级滑移板、四级滑移板相互平行而置,且沿着由后至前方向依序排布。第一滑轨滑块组件装配于安装基板和一级滑移板之间,以使得一级滑移板相对于安装基板可沿着左右方向定向地进行滑移。第二滑轨滑块组件装配于一级滑移板和二级滑移板之间,以使得二级滑移板相对于一级滑移板可沿着左右方向定向地进行滑移。第三滑轨滑块组件装配于二级滑移板和三级滑移板之间,以使得三级滑移板相对于二级滑移板可沿着左右方向定向地进行滑移。第四滑轨滑块组件装配于三级滑移板和四级滑移板之间,以使得四级滑移板相对于三级滑移板可沿着左右方向定向地进行滑移。一级皮带牵引单元、二级皮带牵引单元、三级皮带牵引单元分别连接于安装基板和二级滑移板之间、一级滑移板和三级滑移板之间、二级滑移板和四级滑移板之间。动力部由安装基板进行支撑,当其启动后,一级滑移板、二级滑移板、三级滑移板、四级滑移板在一级皮带牵引单元、二级皮带牵引单元、三级皮带牵引单元的协同作用下相对于安装基板执行向左或向右外伸动作。
作为本发明技术方案的进一步改进,一级皮带牵引单元包括有第一同步带、第二同步带、第一同步轮以及第二同步轮。第一同步带的两端头分别与安装基板、二级滑移板相固定。第二同步带平行地布置于第一同步带的正下方,且其两端头亦分别与安装基板、二级滑移板相固定。第一同步轮、第二同步轮分别装配于一级滑移板的左、右端,以一一对应地用来支撑第一同步带、第二同步带。
作为本发明技术方案的更进一步改进,一级皮带牵引单元还包括有第一皮带压块、第二皮带压块、第三皮带压块以及第四皮带压块。第一皮带压块、第二皮带压块均用来适配第一同步带,且分别安装于安装基板、二级滑移板上。第三皮带压块、第四皮带压块均用来适配第二同步带,且分别安装于安装基板、二级滑移板上。
类比于一级皮带牵引单元的结构设计形式,二级皮带牵引单元包括有第三同步带、第四同步带、第三同步轮以及第四同步轮。第三同步带的两端头分别与一级滑移板、三级滑移板相固定。第四同步带平行地布置于第三同步带的正下方,且其两端头亦分别与一级滑移板、三级滑移板相固定。第三同步轮、第四同步轮分别装配于二级滑移板的左、右端,以一一对应地用来支撑第三同步带、第四同步带。
同样类比于一级皮带牵引单元的结构设计形式,三级皮带牵引单元包括有第五同步带、第六同步带、第五同步轮以及第六同步轮。第五同步带的两端头分别与二级滑移板、四级滑移板相固定。第六同步带平行地布置于第五同步带的正下方,且其两端头亦分别与二级滑移板、四级滑移板相固定。第五同步轮、第六同步轮分别装配于三级滑移板的左、右端,以一一对应地用来支撑第五同步带、第六同步带。
作为本发明技术方案的更进一步改进,动力部包括有支撑架、旋转电机以及齿轮齿条驱动机构。支撑架直接与安装基板相固定,且用来支撑旋转电机。齿轮齿条驱动机构包括有承力座、齿条以及齿轮单元。齿轮单元由主动齿轮和随动齿轮组构成。承力座可拆卸地固定于安装基板上,以用来装入随动齿轮组。正对应于承力座的安装位置,在安装基板上开设有用来与随动齿轮组外形相适配的避让缺口。与随动齿轮组相啮合的主动齿轮由旋转电机进行直接驱动。与随动齿轮组相啮合的齿条可拆卸地固定于一级滑移板上。
在大跨度双向伸缩送料模组的实际送料进程中,四级滑移板用来直接负担待加工工件,仅需启动动力部,在一级皮带牵引单元、二级皮带牵引单元、三级皮带牵引单元的协同作用下一级滑移板、二级滑移板、三级滑移板、四级滑移板依序执行外伸动作,即实现了对加工工件的流转。而当大跨度双向伸缩送料模组需执行缩回动作时,仅需反向启动动力部。在无须对其构件进行改型设计的前提下即可改变送料模组的送料半径,易于进行控制,且动作响应速度快。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
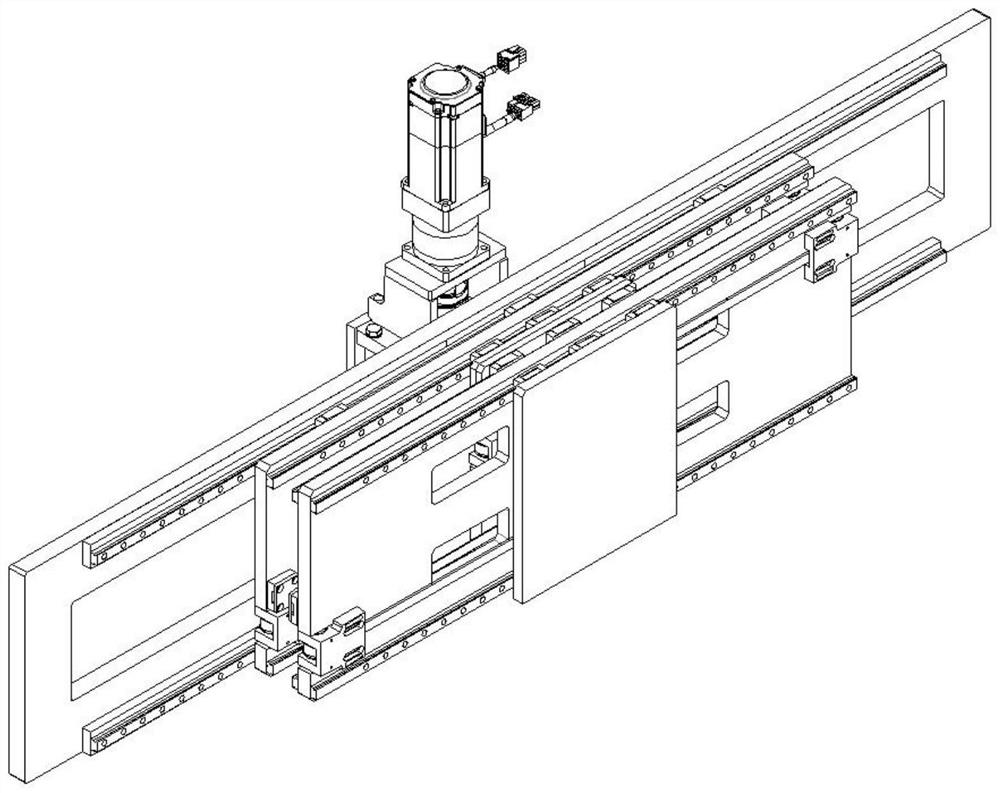
图1是本发明中大跨度双向伸缩送料模组的立体示意图。
图2是图1的俯视图。
图3是图1的正视图。
图4是图3的A-A剖视图。
图5是图3的B-B剖视图。
图6是图3的C-C剖视图。
图7是图3的D-D剖视图。
图8是本发明大跨度双向伸缩送料模组中一级皮带牵引单元、二级皮带牵引单元以及三级皮带牵引单元的相对位置关系图。
图9是图1的侧视图。
图10是图3的E-E剖视图。
图11是本发明中大跨度双向伸缩送料模组的具体应用状态图。
1-安装基板;2-一级滑移板;3-二级滑移板;4-三级滑移板;5-四级滑移板;6-第一滑轨滑块组件;7-第二滑轨滑块组件;8-第三滑轨滑块组件;9-第四滑轨滑块组件;10-一级皮带牵引单元;101-第一同步带;102-第二同步带;103-第一同步轮;104-第二同步轮;105-第一皮带压块;106-第二皮带压块;107-第三皮带压块;108-第四皮带压块;11-二级皮带牵引单元;111-第三同步带;112-第四同步带;113-第三同步轮;114-第四同步轮;12-三级皮带牵引单元;121-第五同步带;122-第六同步带;123-第五同步轮;124-第六同步轮;13-动力部;131-支撑架;132-旋转电机;133-齿轮齿条驱动机构;1331-承力座;1332-齿条;1333-齿轮单元;13331-主动齿轮;13332-随动齿轮组。
具体实施方式
在本发明的描述中,需要理解的是,术语“左”、“右”、“上”、“下”、“前”、“后”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
下面结合具体实施例,对本发明的内容做进一步的详细说明,如图1、2、3、4中所示,可知,其主要由安装基板1、一级滑移板2、二级滑移板3、三级滑移板4、四级滑移板5、第一滑轨滑块组件6、第二滑轨滑块组件7、第三滑轨滑块组件8、第四滑轨滑块组件9、一级皮带牵引单元10、二级皮带牵引单元11、三级皮带牵引单元12以及动力部13等几部分构成。其中,安装基板1、一级滑移板2、二级滑移板3、三级滑移板4、四级滑移板5相互平行而置,且沿着由后至前方向依序排布。第一滑轨滑块组件6装配于安装基板1和一级滑移板2之间,以使得一级滑移板2相对于安装基板1可沿着左右方向定向地进行滑移。第二滑轨滑块组件7装配于一级滑移板2和二级滑移板3之间,以使得二级滑移板3相对于一级滑移板2可沿着左右方向定向地进行滑移。第三滑轨滑块组件8装配于二级滑移板3和三级滑移板4之间,以使得三级滑移板4相对于二级滑移板3可沿着左右方向定向地进行滑移。第四滑轨滑块组件9装配于三级滑移板4和四级滑移板5之间,以使得四级滑移板5相对于三级滑移板4可沿着左右方向定向地进行滑移。如图8中所示,一级皮带牵引单元10、二级皮带牵引单元11、三级皮带牵引单元12分别连接于安装基板1和二级滑移板之间3、一级滑移板2和三级滑移板4之间、二级滑移板3和四级滑移板5之间。动力部13由安装基板1进行支撑,当其启动后,一级滑移板2、二级滑移板3、三级滑移板4、四级滑移板5在一级皮带牵引单元10、二级皮带牵引单元11、三级皮带牵引单元12的协同作用下相对于安装基板1执行向左或向右外伸动作。通过采用上述技术方案进行设置,在无须对其构件进行改型设计的前提下即可改变送料模组的送料半径,且易于进行控制。
上述大跨度双向伸缩送料模组的工作原理大致如下:在大跨度双向伸缩送料模组的实际送料进程中,四级滑移板5用来直接负担待加工工件,仅需启动动力部13,在一级皮带牵引单元10、二级皮带牵引单元11、三级皮带牵引单元12的协同作用下一级滑移板2、二级滑移板3、三级滑移板4、四级滑移板5依序执行外伸动作,即实现了对加工工件的流转。而当大跨度双向伸缩送料模组需执行缩回动作时,仅需反向启动动力部13。
已知,一级皮带牵引单元10可以采取多种设计结构以实现一级滑移板之间2、二级滑移板之间3相对于安装基板1的侧向滑移动作,不过,在此推荐一种设计结构简单,易于制造实施,且动力响应速度快的实施方案,具体如下:如图3-7中所示,一级皮带牵引单元10包括有第一同步带101、第二同步带102、第一同步轮103以及第二同步轮104。第一同步带101的两端头分别与安装基板1、二级滑移板3相固定。第二同步带102平行地布置于第一同步带101的正下方,且其两端头亦分别与安装基板1、二级滑移板3相固定。第一同步轮103、第二同步轮104分别装配于一级滑移板2的左、右端,以一一对应地用来支撑第一同步带101、第二同步带102。
出于降低装配困难度,且易于后续对第一同步带101、第二同步带102进行换新操作方面考虑,如图3-7中所示,一级皮带牵引单元10还增设有第一皮带压块105、第二皮带压块106、第三皮带压块107以及第四皮带压块108。第一皮带压块105、第二皮带压块106均用来适配第一同步带101,且分别安装于安装基板1、二级滑移板3上。第三皮带压块107、第四皮带压块108均用来适配第二同步带102,且分别安装于安装基板1、二级滑移板3上。
为了实现相同设计目的,类比于一级皮带牵引单元10的结构设计形式,如图3-7中所示,二级皮带牵引单元11优选包括有第三同步带111、第四同步带112、第三同步轮113以及第四同步轮114。第三同步带111的两端头分别与一级滑移板2、三级滑移板4相固定。第四同步带112平行地布置于第三同步带111的正下方,且其两端头亦分别与一级滑移板2、三级滑移板4相固定。第三同步轮113、第四同步轮114分别装配于二级滑移板3的左、右端,以一一对应地用来支撑第三同步带111、第四同步带112。
同样类比于一级皮带牵引单元10的结构设计形式,如图3-7中所示,三级皮带牵引单元12优选包括有第五同步带121、第六同步带122、第五同步轮123以及第六同步轮124。第五同步带121的两端头分别与二级滑移板3、四级滑移板5相固定。第六同步带122平行地布置于第五同步带121的正下方,且其两端头亦分别与二级滑移板3、四级滑移板5相固定。第五同步轮123、第六同步轮124分别装配于三级滑移板4的左、右端,以一一对应地用来支撑第五同步带121、第六同步带122。
如图9、10中所示,动力部13优选由支撑架131、旋转电机132以及齿轮齿条驱动机构133等几部分构成。支撑架131直接与安装基板1相固定,且用来支撑旋转电机132。齿轮齿条驱动机构133包括有承力座1331、齿条1332以及齿轮单元1333。齿轮单元1333由主动齿轮13331和随动齿轮组13332构成。承力座1331可拆卸地固定于安装基板1上,以用来装入随动齿轮组13332。正对应于承力座1331的安装位置,在安装基板1上开设有用来与随动齿轮组13332外形相适配的避让缺口。随动齿轮组13332由多组交错排布、依序啮合的随动齿轮构成。与随动齿轮组13332相啮合的主动齿轮13331由旋转电机132进行直接驱动。与随动齿轮组13332相啮合的齿条1332可拆卸地固定于一级滑移板2上。齿轮齿条驱动机构133在进行力传递进程中具有传递动力大、高效、传动比恒定的优点,除此之外,其还具有寿命长,工作平稳性好以及易于进行后期维护的优点。
最后,还需要说明的是,为了便于本领域技术人员充分理解本发明所公开的技术方案,图11示出了本发明中大跨度双向伸缩送料模组的具体应用状态图。
对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本发明。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其它实施例中实现。因此,本发明将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
- 一种大跨度双向伸缩送料模组
- 一种大跨度双向伸缩送料模组