基于焊接机器人的三偏心阀门焊接系统
文献发布时间:2023-06-19 11:17:41
技术领域
本发明涉及焊接装置技术领域,具体是基于焊接机器人的三偏心阀门焊接系统。
背景技术
阀门是在流体系统中,用来控制流体的方向、压力、流量的装置,阀门是使配管和设备内的介质(液体、气体、粉末)流动或停止并能控制其流量的装置。
目前三偏心蝶阀的密封面堆焊多是采用手工堆焊,焊接过程需要不断变换工件位置,才能满足密封面的堆焊,且焊接质量较差。
发明内容
本发明的目的在于提供基于焊接机器人的三偏心阀门焊接系统,旨在解决现有技术中的焊接三偏心蝶阀密封面效率低,且焊接质量差的问题。
为实现上述目的,本发明采用如下技术方案:基于焊接机器人的三偏心阀门焊接系统,包括地板,所述地板的上方设置有三偏心阀门,所述三偏心阀门的一侧设置有用于固定三偏心阀门内圈的定位夹具,所述定位夹具的一侧设置有带动定位夹具转动的转动装置,所述转动装置远离定位夹具的一侧设置有带动转动装置转动的回转装置,所述回转装置的底部设置有横向移动装置,且所述横向移动装置用于带动所述回转装置沿横向方向移动,所述地板上还设置有六轴机器人和焊枪,所述六轴机器人用于夹持焊枪对三偏心阀门进行焊接,所述地板上固定连接有对清理焊枪的清枪装置。
本发明的进一步的技术方案为,所述定位夹具采用三爪卡盘,所述转动装置包括C型板,所述定位夹具与C型板为转动连接,所述C型板的内侧壁固定安装有第一伺服电机,所述第一伺服电机的输出端固定连接有减速器,所述减速器的输出端通过驱动轴与所述定位夹具固定连接。
本发明的进一步的技术方案为,所述回转装置包括外壳体,所述外壳体的内侧壁固定安装有第二伺服电机,所述第二伺服电机的输出端通过转轴固定连接有主动齿轮,所述转轴的一端与所述外壳体为转动连接,所述主动齿轮啮合连接有从动齿轮,所述从动齿轮的内部固定连接有活动杆,所述活动杆的两端通过轴承与所述外壳体连接,所述外壳体的内部转动连接有连接杆,所述连接杆的外表面固定连接有扇形齿轮,所述扇形齿轮与所述从动齿轮相啮合,所述连接杆与所述C型板固定连接。
本发明的进一步的技术方案为,所述扇形齿轮的圆心角为度。
本发明的进一步的技术方案为,所述横向移动装置包括与所述外壳体滑动连接的底座,所述底座的一侧固定安装有步进电机,所述步进电机的输出端固定连接有丝杆,所述丝杆的外表面螺纹连接有螺纹板,所述螺纹板与所述外壳体固定连接。
本发明的进一步的技术方案为,所述地板上设置有焊机和气瓶,所述焊机通过导线与所述焊枪电性连接,所述气瓶通过输气管与所述焊枪固定连接。
本发明的进一步的技术方案为,所述地板上设置有焊接烟尘净化器。
本发明的进一步的技术方案为,所述六轴机器人的型号为JZJA-,所述六轴机器人上固定安装有防碰撞传感器,所述防碰撞传感器位于焊枪的一侧。
本发明的进一步的技术方案为,所述地板的顶部设置有安全围栏。
本发明的有益效果是:
1、使用定位夹具固定三偏心阀门的内圈后,通过转动装置带动定位夹具转动,使用回转装置能够带动转动装置转动,从而使得三偏心阀门可以多角度转动,考虑到焊缝是空间曲线分布,焊接过程需要不断变换工件位置,才能满足密封面的堆焊,通过六轴机器人与回转装置和转动装置协调联动,避免了焊接轨迹偏差和成型不良的问题,大大减少后期人工修补和返工的机率,焊接厚度均匀,减少后期二次加工时的加工量,阀体的总体制造成本降低,质量提升。
2、第二伺服电机通过转轴带动主动齿轮转动,主动齿轮通过从动齿轮带动扇形齿轮转动,因此可带动C型板转动,能够调整三偏心阀门的角度,使得三偏心阀门的密封面朝向六轴机器人,便于焊接,C型板的翻转动作范围是至度,避免回转装置与转动装置发生碰撞,或者三偏心阀门与回转装置发生碰撞的问题。
3、步进电机通过丝杆带动螺纹板横向移动,从而带动三偏心阀门横向移动,能够调节三偏心阀门与六轴机器人之间的距离,便于焊接的同时,也方便安装或拆卸三偏心阀门,焊接烟尘净化器能够吸收焊接过程中产生的有毒物质,营造了良好的工作环境,通过设置防碰撞传感器,避免焊接过程中,焊枪与三偏心阀门的内圈发生碰撞的问题,通过设置安全围栏,能够在焊接过程中,保护工作人员的安全。
附图说明
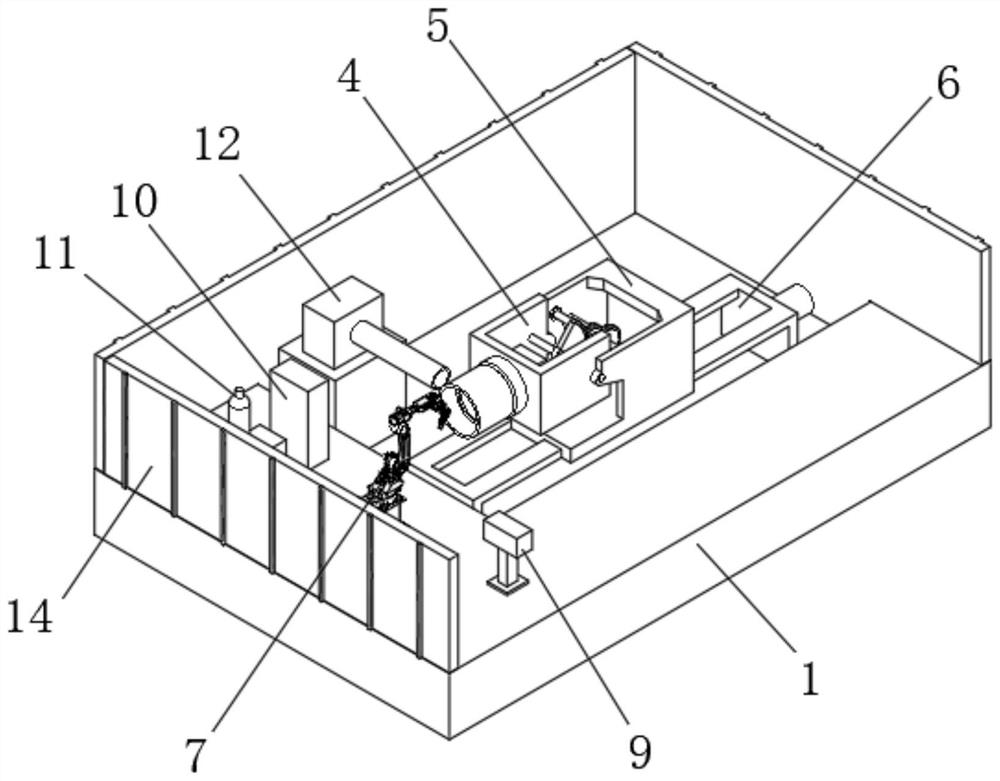
图1是本发明的具体实施例的立体结构示意图;
图2是本发明的具体实施例的正视结构示意图;
图3是本发明的具体实施例的地板结构示意图;
图4是本发明的具体实施例的转动装置和回转装置结构示意图;
图5是本发明的具体实施例的六轴机器人结构示意图;
图6是本发明的具体实施例的图5中A处放大结构示意图;
图7是本发明的具体实施例的横向移动装置结构示意图。
图中:1、地板;2、三偏心阀门;3、定位夹具;4、转动装置;401、C型板;402、第一伺服电机;403、减速器;5、回转装置;501、外壳体;502、第二伺服电机;503、转轴;504、主动齿轮;505、从动齿轮;506、活动杆;507、连接杆;508、扇形齿轮;6、横向移动装置;601、底座;602、步进电机;603、丝杆;604、螺纹板;7、六轴机器人;8、焊枪;9、清枪装置;10、焊机;11、气瓶;12、焊接烟尘净化器;13、防碰撞传感器;14、安全围栏。
具体实施方式
下面结合附图对本发明的具体实施方式作进一步的说明。
如图1-7所示,基于焊接机器人的三偏心阀门焊接系统,包括地板1,地板1的上方设置有三偏心阀门2,三偏心阀门2的一侧设置有用于固定三偏心阀门2内圈的定位夹具3,定位夹具3的一侧设置有带动定位夹具3转动的转动装置4,转动装置4远离定位夹具3的一侧设置有带动转动装置4转动的回转装置5,回转装置5的底部设置有横向移动装置6,且横向移动装置6用于带动回转装置5沿横向方向移动,地板1上还设置有六轴机器人7和焊枪8,六轴机器人7用于夹持焊枪8对三偏心阀门2进行焊接,地板1上固定连接有对清理焊枪8的清枪装置9。
在本具体实施例中,使用定位夹具3固定三偏心阀门2的内圈后,通过转动装置4带动定位夹具3转动,使用回转装置5能够带动转动装置4转动,从而使得三偏心阀门2可以多角度转动,考虑到焊缝是空间曲线分布,焊接过程需要不断变换工件位置,才能满足密封面的堆焊,通过六轴机器人7与回转装置5和转动装置4协调联动,避免了焊接轨迹偏差和成型不良的问题,大大减少后期人工修补和返工的机率,焊接厚度均匀,减少后期二次加工时的加工量,阀体的总体制造成本降低,质量提升,清枪装置用于剪丝、喷油和清理焊渣,属于现有技术,不再叙述。
本发明的另一具体实施例中,定位夹具3采用三爪卡盘,转动装置4包括C型板401,定位夹具3与C型板401为转动连接,C型板401的内侧壁固定安装有第一伺服电机402,第一伺服电机402的输出端固定连接有减速器403,减速器403的输出端通过驱动轴与定位夹具3固定连接,第一伺服电机402通过减速器403带动定位夹具3转动,从而使得三偏心阀门2能够三百六十度转动。
具体的,回转装置5包括外壳体501,外壳体501的内侧壁固定安装有第二伺服电机502,第二伺服电机502的输出端通过转轴503固定连接有主动齿轮504,转轴503的一端与外壳体501为转动连接,主动齿轮504啮合连接有从动齿轮505,从动齿轮505的内部固定连接有活动杆506,活动杆506的两端通过轴承与外壳体501连接,外壳体501的内部转动连接有连接杆507,连接杆507的外表面固定连接有扇形齿轮508,扇形齿轮508与从动齿轮505相啮合,连接杆507与C型板401固定连接,第二伺服电机502通过转轴503带动主动齿轮504转动,主动齿轮504通过从动齿轮505带动扇形齿轮508转动,因此可带动C型板401转动,能够调整三偏心阀门2的角度,使得三偏心阀门2的密封面朝向六轴机器人7,便于焊接。
具体的,扇形齿轮508的圆心角为110度,C型板401的翻转动作范围是0至110度,避免回转装置5与转动装置4发生碰撞,或者三偏心阀门2与回转装置5发生碰撞的问题。
具体的,横向移动装置6包括与外壳体501滑动连接的底座601,底座601的一侧固定安装有步进电机602,步进电机602的输出端固定连接有丝杆603,丝杆603的外表面螺纹连接有螺纹板604,螺纹板604与外壳体501固定连接,步进电机602通过丝杆603带动螺纹板604横向移动,从而带动三偏心阀门2横向移动,能够调节三偏心阀门2与六轴机器人7之间的距离,便于焊接的同时,也方便安装或拆卸三偏心阀门2。
具体的,地板1上设置有焊机10和气瓶11,焊机10通过导线与焊枪8电性连接,气瓶11通过输气管与焊枪8固定连接,焊机10为焊枪8提供电能,气瓶11可以对焊枪8输送气体保护焊,需要说明的是焊枪8采用气保护焊水冷焊枪,焊枪8上设置有送丝机构,送丝速度为1.4~24m/min,焊接方法可采用二氧化碳、MAG、MMA,实芯焊丝、药芯焊丝或电焊条。
具体的,地板1上设置有焊接烟尘净化器12,焊接烟尘净化器12能够吸收焊接过程中产生的有毒物质,营造了良好的工作环境。
具体的,六轴机器人7的型号为JZJ20A-188,六轴机器人7上固定安装有防碰撞传感器13,防碰撞传感器13位于焊枪8的一侧,防碰撞传感器13的型号为TH6D-150-KFMC-AB,通过设置防碰撞传感器13,避免焊接过程中,焊枪8与三偏心阀门2的内圈发生碰撞的问题。
具体的,地板1的顶部设置有安全围栏14,通过设置安全围栏14,能够在焊接过程中,保护工作人员的安全。
在本发明的描述中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
- 基于焊接机器人的三偏心阀门焊接系统
- 基于焊接机器人的三偏心阀门焊接系统