一种垄作草莓采摘机器人
文献发布时间:2023-06-19 11:21:00
技术领域
本发明属于自动化技术领域,具体涉及一种垄作草莓采摘机器人。
背景技术
目前,日光温室中垄作栽培的草莓采摘多依靠人工,费时费力,由于草莓生长于垄上且垄沟狭窄,因而采摘机械体必须小巧灵活,现有的平铺于地垄表面的草莓采摘机械装置,其采摘方式不能用于日光温室垄作草莓果实的采摘,即使有些采摘装置可沿垄沟方向移动作业,但也不能跨垄移动,特别是在垄沟距离较长的采摘现场,所以需要一种可跨垄移动的草莓采摘装置,以解决上述问题。
发明内容
针对上述问题,本发明提供一种垄作草莓采摘机器人。
为解决上述问题,本发明采取的技术方案为:一种垄作草莓采摘机器人,包括支撑装置及可在其上运动的移动装置、可在移动装置上滑动的采摘装置,支撑装置为移动装置跨垄运动搭建支撑平台,移动装置通过驱动车轮在支撑装置底板上跨垄前后运动,采摘装置可在支架上沿垄沟方向滑动。
所述支撑装置包括水平镜像向内设置的两个L型支撑底座Ⅰ和与支撑底座Ⅰ翻转设置的两个L型支撑底座Ⅱ,两个支撑底座Ⅰ与对应的支撑底座Ⅱ构成两组支撑平台,支撑底座Ⅰ和支撑底座Ⅱ分别设置有相互垂直的竖向立板和横向底板,底板为移动装置前后运动提供支撑平台,支撑底座Ⅰ和支撑底座Ⅱ的底板相对设置,且通过翻转支撑底座Ⅰ与支撑底座Ⅱ的底板可至同一水平位置,从而使支撑底座Ⅰ和支撑底座Ⅱ的底板交替作用于移动装置的前车轮Ⅰ和后车轮Ⅰ、前车轮Ⅱ和后车轮Ⅱ,实现移动装置跨垄运动,立板内侧水平设置有滑轨Ⅰ,可与移动装置的旋转接头滑动连接,立板外侧前后两端分别旋转连接有支撑腿,底板外侧中部旋转连接有支撑腿,用于装置的支撑。
所述移动装置包括可在支撑底座Ⅰ底板上运动的前车轮Ⅰ、后车轮Ⅰ和可在支撑底座Ⅱ底板上运动的前车轮Ⅱ、后车轮Ⅱ,且前车轮Ⅰ与前车轮Ⅱ同轴线连接,后车轮Ⅰ与后车轮Ⅱ同轴线连接,工作时,车轮交替作用在支撑底座Ⅰ和支撑底座Ⅱ构成的两组移动平台上,由前车轮Ⅰ与前车轮Ⅱ、后车轮Ⅰ与后车轮Ⅱ中部分别水平向前和向后设置有前连杆、后连杆,前连杆端部垂直于立板设置有前伸缩杆,后连杆端部垂直于立板设置有后伸缩杆,前伸缩杆两端通过电机设置有前旋转接头Ⅰ和前旋转接头Ⅱ,前旋转接头Ⅰ和前旋转接头Ⅱ与滑轨Ⅰ滑动连接且通过控制可与滑轨Ⅰ脱离,从而实现前旋转接头沿滑轨Ⅰ滑动,同时通过控制前伸缩杆的伸缩实现前旋转接头Ⅰ和前旋转接头Ⅱ与滑轨Ⅰ的连接或脱离,后伸缩杆两端通过电机设置有后旋转接头Ⅰ和后旋转接头Ⅱ,后旋转接头Ⅰ和后旋转接头Ⅱ与滑轨Ⅰ滑动连接且通过控制可与滑轨Ⅰ脱离,从而实现后旋转接头沿滑轨Ⅰ滑动,同时通过控制后伸缩杆的伸缩实现后旋转接头Ⅰ和后旋转接头Ⅱ与滑轨Ⅰ的连接或脱离,由前车轮Ⅰ与前车轮Ⅱ、后车轮Ⅰ与后车轮Ⅱ中部分别竖直向上设置有支撑杆,支撑杆顶端通过水平支架连接,用于承载采摘装置。
所述采摘装置通过支架与移动装置沿垄沟方向滑动连接,实现采摘装置的滑动。
采摘装置包括控制箱、垂直于控制箱向下设置的连接杆、连接杆底部水平设置的托盘和至少一个采摘机械手,托盘用于承载草莓收纳容器,通过摄像头识别采摘目标并控制机械手动作。
所述支撑腿为可根据地形状况调节有效长度的缓冲结构,从而保持支撑装置的水平平稳,优选的,支撑腿包括大腿和与大腿通过旋转关节连接的小腿,通过旋转关节可使小腿根据地形状况调节与大腿的夹角,从而调节支撑腿的有效长度保持支撑装置的底板水平。
所述连接杆底部垂直于垄沟向前和向后分别设置一个采摘机械手,可使采摘机器人位于垄沟中作业时前后同步采摘,提高作业效率。
所述支架上沿垄沟方向设置有滑轨Ⅱ,采摘装置通过滑轨Ⅱ与支架滑动连接,用于实现采摘装置的滑动。
所述底板外侧中部旋转连接的支撑腿向前和向后对称设置,有助于支撑装置的平衡稳定。
所述小腿底部设置有滚轮,可实现支撑装置沿垄沟方向移动。
本发明提供了一种草莓采摘机器人,可替代人工采摘,省时省力,采摘装置不仅可以沿垄沟方向移动,同时能够跨垄移动,特别是在垄沟距离较长的采摘现场,可自动跨垄至下一垄沟进行采摘,以完成采摘装置横向和纵向的移动作业,从而实现垄作草莓的自动化连续采摘。
附图说明
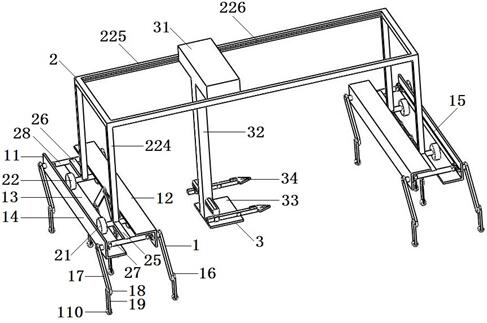
附图1为本发明所述垄作草莓采摘机器人的结构示意图;
附图2为本发明所述移动装置的结构示意图;
附图3为本发明所述移动装置的局部示意图;
附图4为本发明所述支撑底座Ⅰ的结构示意图;
附图5为本发明所述支撑底座Ⅱ的结构示意图。
其中,1-支撑装置,11-支撑底座Ⅰ,12-支撑底座Ⅱ,13-底板,14-立板,15-滑轨Ⅰ,16-支撑腿,17-大腿,18-旋转关节,19-小腿,110-滑轮,2-移动装置,21-前车轮Ⅰ,22-后车轮Ⅰ,23-前车轮Ⅱ,24-后车轮Ⅱ,25-前连杆,26-后连杆,27-前伸缩杆,28-后伸缩杆,29-电机,210-前旋转接头Ⅰ,211-前旋转接头Ⅱ,212-后旋转接头Ⅰ,213-后旋转接头Ⅱ,214-支撑杆,215-支架,216-滑轨Ⅱ,3-采摘装置,31-控制箱,32-连接杆,33-托盘,34-机械手。
具体实施方式
如图所示,一种垄作草莓采摘机器人,包括支撑装置1及可在其上运动的移动装置2、可在移动装置2上滑动的采摘装置3,支撑装置1为移动装置2跨垄运动搭建支撑平台,移动装置2通过驱动车轮在支撑装置底板13上跨垄前后运动,采摘装置3可在支架215上沿垄沟方向滑动。
所述支撑装置1包括水平镜像向内设置的两个L型支撑底座Ⅰ11和与支撑底座Ⅰ11翻转设置的两个L型支撑底座Ⅱ12,两个支撑底座Ⅰ11与对应的支撑底座Ⅱ12构成两组支撑平台,支撑底座Ⅰ11和支撑底座Ⅱ12分别设置有相互垂直的竖向立板14和横向底板13,底板13为移动装置2前后运动提供支撑平台,支撑底座Ⅰ11和支撑底座Ⅱ12的底板13相对设置,且通过翻转支撑底座Ⅰ11与支撑底座Ⅱ12的底板13可至同一水平位置,从而使支撑底座Ⅰ11和支撑底座Ⅱ12的底板13交替作用于移动装置2的前车轮Ⅰ21和后车轮Ⅰ22、前车轮Ⅱ23和后车轮Ⅱ24,实现移动装置2跨垄运动,立板14内侧水平设置有滑轨Ⅰ15,可与移动装置2的旋转接头滑动连接,立板14外侧前后两端分别旋转连接有支撑腿16,底板13外侧中部旋转连接有支撑腿16,用于装置的支撑。
所述移动装置2包括可在支撑底座Ⅰ底板13上运动的前车轮Ⅰ21、后车轮Ⅰ22和可在支撑底座Ⅱ底板13上运动的前车轮Ⅱ23、后车轮Ⅱ24,且前车轮Ⅰ21与前车轮Ⅱ23同轴线连接,后车轮Ⅰ22与后车轮Ⅱ24同轴线连接,工作时,车轮交替作用在支撑底座Ⅰ11和支撑底座Ⅱ12构成的两组移动平台上,由前车轮Ⅰ21与前车轮Ⅱ23、后车轮Ⅰ22与后车轮Ⅱ24中部分别水平向前和向后设置有前连杆25、后连杆26,前连杆25端部垂直于立板14设置有前伸缩杆27,后连杆26端部垂直于立板14设置有后伸缩杆28,前伸缩杆27两端通过电机29设置有前旋转接头Ⅰ210和前旋转接头Ⅱ211,前旋转接头Ⅰ210和前旋转接头Ⅱ211与滑轨Ⅰ15滑动连接且通过控制可与滑轨Ⅰ15脱离,从而实现前旋转接头沿滑轨Ⅰ15滑动,同时通过控制前伸缩杆27的伸缩实现前旋转接头Ⅰ210和前旋转接头Ⅱ211与滑轨Ⅰ15的连接或脱离,后伸缩杆28两端通过电机29设置有后旋转接头Ⅰ212和后旋转接头Ⅱ213,后旋转接头Ⅰ212和后旋转接头Ⅱ213与滑轨Ⅰ15滑动连接且通过控制可与滑轨Ⅰ15脱离,从而实现后旋转接头沿滑轨Ⅰ15滑动,同时通过控制后伸缩杆28的伸缩实现后旋转接头Ⅰ212和后旋转接头Ⅱ213与滑轨Ⅰ15的连接或脱离,由前车轮Ⅰ21与前车轮Ⅱ23、后车轮Ⅰ22与后车轮Ⅱ24中部分别竖直向上设置有支撑杆214,支撑杆214顶端通过水平支架215连接,用于承载采摘装置3。
所述采摘装置3通过支架215与移动装置2沿垄沟方向滑动连接,实现采摘装置3的滑动。
所述采摘装置3包括控制箱31、垂直于控制箱31向下设置的连接杆32、连接杆32底部水平设置的托盘33和至少一个采摘机械手34,托盘33用于承载草莓收纳容器,通过摄像头识别采摘目标并控制机械手34动作。
所述支撑腿16为可根据地形状况调节有效长度的缓冲结构,从而保持支撑装置1的水平平稳,优选的,支撑腿16包括大腿17和与大腿17通过旋转关节18连接的小腿19,通过旋转关节18可使小腿19根据地形状况调节与大腿17的夹角,从而调节支撑腿16的有效长度保持支撑装置的底板13水平。
所述连接杆32底部垂直于垄沟向前和向后分别设置一个采摘机械手34,可使采摘机器人位于垄沟中作业时前后同步采摘,提高作业效率。
所述支架215上沿垄沟方向设置有滑轨Ⅱ216,采摘装置3通过滑轨Ⅱ216与支架215滑动连接,用于实现采摘装置3的滑动。
所述底板13外侧中部旋转连接的支撑腿16向前和向后对称设置,有助于支撑装置1的平衡稳定。
所述小腿19底部设置有滚轮110,可实现支撑装置1沿垄沟方向移动。
实施例:初始状态时,前旋转接头Ⅰ210、前旋转接头Ⅱ211、后旋转接头Ⅰ212、后旋转接头Ⅱ213均与滑轨Ⅰ15连接,前车轮Ⅰ21与后车轮Ⅰ22作用在支撑底座Ⅰ的底板13上。控制箱31通过滑轨Ⅱ216将采摘机械手34滑动至采摘区域,通过摄像头识别采摘目标并控制机械手34开始作业,并将采摘下的草莓放入托盘33上的收纳容器中。通过滑轨Ⅱ216可实现机械手34沿垄沟方向的小范围移动,通过小腿19底部设置的滚轮110可实现支撑装置1沿垄沟方向的大范围移动。当支撑装置1进行跨垄运动时,控制后伸缩杆28的伸缩实现后旋转接头Ⅱ213与滑轨Ⅰ15脱离,通过电机29控制前旋转接头Ⅱ211转动,从而实现支撑底座Ⅱ12的翻转,直至支撑底座Ⅱ12的底板翻转至与支撑底座Ⅰ11的底板在同一水平位置,同时支撑底座Ⅱ12的支撑腿16跨垄翻转至下一垄沟内。支撑腿16根据地形状况通过旋转关节18调节小腿19与大腿17的夹角从而保持支撑装置的底板13水平,然后驱动车轮使移动装置2在支撑装置的底板13上向前运动,后旋转接头Ⅱ213随着移动装置2运动至支撑底座Ⅱ12上通过控制后伸缩杆28的伸缩继续实现与滑轨Ⅰ15连接。运动过程中移动装置2由前车轮Ⅰ21与后车轮Ⅰ22作用在支撑底座Ⅰ的底板13上过渡到前车轮Ⅱ23与后车轮Ⅱ24作用在支撑底座Ⅱ的底板13上。当移动装置2完全运动至支撑底座Ⅱ的底板13上后,通过电机29控制后旋转接头Ⅰ212转动,从而实现支撑底座Ⅰ11的翻转,直至支撑底座Ⅰ11的底板翻转至前车轮Ⅰ21与后车轮Ⅰ22的上方,此时可控制采摘装置2继续在垄沟中作业。待在该垄沟作业完成后,通过控制前伸缩杆27的伸缩实现前旋转接头Ⅰ210与滑轨Ⅰ15连接,控制后伸缩杆28的伸缩实现后旋转接头Ⅰ212与滑轨Ⅰ15脱离。然后通过电机29控制前旋转接头Ⅰ210转动,从而实现支撑底座Ⅰ11的翻转,直至支撑底座Ⅰ11的底板翻转至与支撑底座Ⅱ12的底板在同一水平位置,同时支撑底座Ⅰ11的支撑腿16跨垄翻转至下一垄沟内。驱动车轮使移动装置2在支撑装置的底板13上向前运动,后旋转接头Ⅰ212随着移动装置2运动至支撑底座Ⅰ11上通过控制后伸缩杆28的伸缩继续实现与滑轨Ⅰ15连接。运动过程中移动装置2由前车轮Ⅱ23与后车轮Ⅱ24作用在支撑底座Ⅱ的底板13上过渡到前车轮Ⅰ21与后车轮Ⅰ22作用在支撑底座Ⅰ的底板13上。当移动装置2完全运动至支撑底座Ⅰ的底板13上后,通过电机29控制后旋转接头Ⅱ214转动,从而实现支撑底座Ⅱ12的翻转,直至支撑底座Ⅱ12的底板翻转至前车轮Ⅱ23与后车轮Ⅱ24的上方,此时可控制采摘装置2继续在垄沟中作业。
- 草莓采摘机器人精准采摘执行机构及垄作草莓采摘机器人
- 一种垄作草莓采摘机器人