基于压力坐垫的人体坐姿识别系统
文献发布时间:2023-06-19 11:22:42
技术领域
本发明涉及一种人体坐姿识别系统,特别是一种基于压力坐垫的人体坐姿识别系统。
背景技术
随着工作环境和工具的改变,人们的工作型态逐渐从需要繁重体力的工作转换成需借助计算机完成工作的模式,使得在工作场所中的久坐行为(sedentary behavior)越来越普遍。虽然繁重的体力劳动工作减少,但并没有降低肌肉骨骼损伤(Musculo-skeletaldisorder,MSD)的风险。久坐行为造成了另一形态的肌肉骨骼损伤。目前已有证据表明,工作中的久坐行为与下背痛的发生存在一定的关联。尤其是久坐与不良坐姿或者全身性振动等风险因素同时存在的时候,会显著提高下背痛发病率。在较为早期的研究中,发现下背痛的发病率在久坐职业群体中较高。从生物力学的角度来看,坐姿能带来更高的椎间盘负荷,更快的腰椎疲劳以及局部组织代谢的减少。不当的工作台设计、不良的工休安排、不适当的坐姿会导致下背、肩、颈、上肢等各个部位的不适乃至肌肉骨骼损伤。
目前已有研究表明,坐姿变化与躯体不适度累积存在一定关联,躯体不适度上升往往伴随着坐姿变化频率的上升。通过对坐姿变化的观察,获取躯体不适度状态有一定的可行性。然而,传统的人工姿势观察编码方法成本较高,尤其不适用于长时间的久坐行为研究当中。随着传感器技术、机器学习算法的成熟,已经出现了一些较为成熟的自动化坐姿检测、识别、记录方法,常见方法包括机器视觉识别,穿戴式传感器方案等。这些技术的成熟使得坐姿能以较低成本进行准确记录和识别。其自动化、无干预的特点也便于在实际工作现场进行推广。
目前尚未出现在实际工作现场利用压力坐垫和卷积神经网络对坐姿种类进行识别,并结合坐姿状态识别进一步修正识别结果的系统。目前的坐姿识别多采用Logistic回归、支持向量机、k最邻近算法、神经网络、决策树等机器学习算法,需要特征提取和分类,增加后续坐姿识别中数据处理的复杂性。
发明内容
本发明的目的在于提供一种能够识别坐姿种类和状态的人体坐姿识别系统,能够便捷、实时地对坐姿状态进行识别,并能够反馈给使用者,以实现相应的坐姿干预。
本发明的技术方案如下。
一种人体坐姿识别系统,包括压力测量装置和数据处理装置,其中
所述压力测量装置用于采集使用者在其坐姿下的座椅压力分布数据,并发送给所述数据处理装置;
所述数据处理装置被配置为基于所述数据使用坐姿种类识别算法完成坐姿种类识别,以及使用坐姿状态识别模型完成坐姿状态识别,并对识别结果进行修正与反馈。
优选地,所述压力测量装置包括第一柔性压力测量垫和第二柔性压力测量垫;
所述第一柔性压力测量垫放置于所述座椅的椅面,所述第二柔性压力测量垫放置于所述座椅的靠背。
优选地,所述压力分布数据包括32*32压力分布数据矩阵。
优选地,所述坐姿种类识别算法包括借由输入的压力分布数据经过卷积神经网络训练的分类器识别得到坐姿状态输出。
优选地,所述卷积神经网络的结构依次包括输入层、卷积层、批量标准化层、线性整流层、池化层、全连接层和输出层。
优选地,所述输入层以压力分布矩阵数值作为输入;
所述卷积层的矩阵输出大小为(n-f+2p)/s+1;
所述池化层的矩阵输出大小为(n-f)/s+1;
以上n为输入的压力分布矩阵的大小,f为卷积核的大小,p为填充的大小,s为步长。
优选地,所述全连接输出根据压力测量装置的放置位置确定,根据预先定义的坐姿设置全连接层的尺寸。
优选地,所述坐姿状态识别模型采用前后两坐姿采集点数据的压力变异系数差、重心位置距离差和与座椅接触面积差作为决定稳定与非稳定两种坐姿差异的特征。
优选地,所述对识别结果进行修正与反馈包括将识别坐姿种类中动态坐姿、坐姿识别结果最终修正,以及计算一种或多种坐姿行为指标并反馈给系统的使用者。
优选地,所述最终修正过后的坐姿状态数据中,当坐姿状态连续出现两次以上非稳定状态,视为一次连续性非稳定状态坐姿;在连续性非稳定状态之第一个非稳定状态后的坐姿种类采集点,及最后一个非稳定状态前的坐姿采集点之间所有的坐姿种类被修正为动态坐姿。
通过以上技术方案,本发明能够取得如下技术效果。
本发明的坐姿识别算法无需明确设计特征设计和提取,特征由卷积层直接从原始数据中学习。
本发明结合坐姿状态识别进一步修正识别坐姿识别结果,对坐姿行为的刻画更完整,同时可以支持以较低频率完成长时间的坐姿数据采集,数据处理和分析的负荷较低。
附图说明
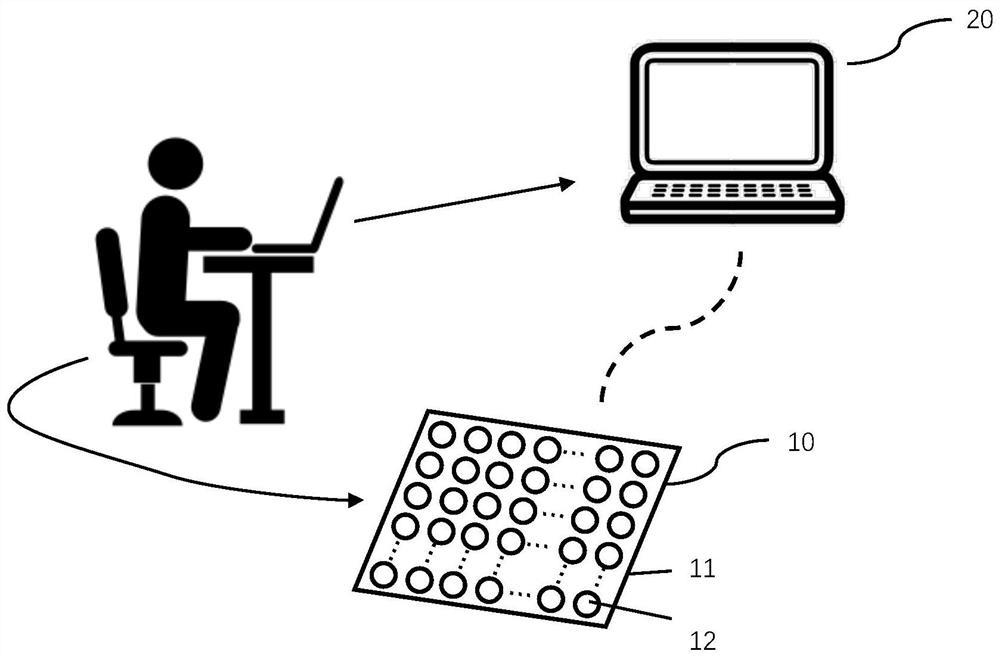
图1是本发明的人体坐姿识别系统的原理示意图;
图2是本发明的压力测量系统工作流程示意图;
图3是本发明的压力测量系统摆放示意图;
图4是本发明使用的深度学习网络概念示意图;
图5是本发明使用的卷积神经网络架构示意图;
图6是本发明的系统输出的坐姿随时间变化示意图;
图7是本发明的系统输出的各种坐姿在采集时间内的时长示意图;
图8是本发明的系统输出的各种坐姿在采集时间内的比例示意图;
图9是本发明的系统输出坐姿行为指标计算结果示意图。
具体实施方式
如图1-3所示,根据本发明的一种人体坐姿识别系统,包括压力测量装置10和数据处理装置20。
所述压力测量装置10用于采集使用者在其坐姿下的座椅压力分布和状态数据,并发送给所述数据处理装置20。在一优选的实施方式中,所述压力测量装置为分布式压力测量系统,其包括多个独立电子压力传感器11和柔性压力测量垫12。所述多个独立电子压力传感器11基本均匀地分布在柔性压力测量垫12上。
本领域技术人员能够理解,虽然本实施例中的压力测量装置为压力坐垫,然而本发明并不局限于此。现有技术中任何能够测量压力分布和状态的装置都可以用于本发明。
所述数据处理装置被配置为基于所述数据使用坐姿种类识别算法完成坐姿种类识别,以及使用坐姿状态识别模型完成坐姿状态识别,并对识别结果进行修正与反馈。本领域技术人员能够理解,所述数据处理装置能够通过配置有数据处理程序的计算机类设备实现,其能够通过有线或无线的数据通信连接从压力测量装置获取压力分布和状态数据,并且按照数据处理程序设计的流程对获取的压力分布和状态数据进行分析处理。
下面介绍本发明的人体坐姿识别系统的工作流程。
如图2所示,本发明的人体坐姿识别系统的工作流程包括4步:步骤S1:压力坐垫数据采集及格式转换;步骤S2:坐姿种类识别;步骤S3:坐姿状态识别;步骤S4:坐姿识别结果修正及反馈。
步骤S1:压力坐垫数据采集及格式转换。
考虑到办公现场的特点,如空间紧张、座椅种类不确定等,在市场上较为成熟的压力采集设备中,选用已经成熟商用化的分布式压力测量系统,如图3左侧所示。该分布式压力测量系统外接两块柔性压力测量垫,分别放置于椅面和座椅靠背上,能有效覆盖人体与椅面和靠背间的接触范围。座椅选用具有扶手及具有调节高度功能之办公室常规座椅,如图3右侧所示。
所用的分布式压力测量系统的软件应当具备压力数据转换功能,使所采集数据能用于数据处理装置中的其他软件作进一步数据分析。自由选择采集时间的长短与采集频率,输出数据有采集点和对应时间点,以及所有采集点的32×32矩阵压力分布值和相应统计数据,包括最小值、最大值、平均值、方差、标准差、变异系数、水平中心、垂直中心、与座椅接触面积、分布区域、感应面积。
步骤S2:坐姿种类识别。
具有两层或更多隐藏层的神经网络被定义为简单神经网络和深度学习神经网络。如图4所示,其中左侧为简单神经网络的一般形式,右侧为深度学习神经网络的一般形式。卷积神经网络(Convolutional Neural Networks,CNN)算法是一种采用卷积数学运算的多层神经网络,属于深度学习神经网络的分支,主要由输入层、卷积层、线性整流层、池化层、全连接层和输出层组成,如图5所示。卷积层内的卷积核参数共享和层间连接的稀疏性使得卷积神经网络训练参数降低、网络复杂性降低,计算量减小,效果稳定且无需额外的特征工程(feature engineering),特别是对于多维输入向量,在模式识别方面有着独特的优越性,常被应用于计算机视觉等领域。
本发明的人体坐姿识别系统使用的坐姿识别算法卷积神经网络的架构如图5所示,主要由输入层、卷积层、线性整流层、池化层、全连接层和输出层组成。
神经网络中涉及每一层的输入和输出,具体说来卷积神经网络卷积核层输出的计算主要涉及卷积层和池化层。其中,a*b*c中a,b,c分别表示卷积核的深度、长度和宽度。假设n为输入矩阵的大小,f为卷积核的大小,p为填充的大小,s为步长,则卷积层的矩阵输出大小=(n-f+2p)/s+1;池化层的矩阵输出大小=(n-f)/s+1,池化层一般不会进行填充,故p=0。
输入层:以32×32矩阵的压力分布数值作为输入,输入层尺寸大小为32×32×1。
卷积层(Convolution Layer):由若干卷积单元组成,卷积运算目的在于提取输入的不同特征,第一层卷积层只能提取一些低阶的特征如边缘、线条和角等层级,更多层的网路能从低阶特征中迭代提取更复杂的特征。本发明使用的坐姿识别算法共包含4个卷积层,卷积核大小均为3×3,卷积核移动步长均为1,4个卷积核的个数分别为8、16、32、64。
批量标准化层(Batch Normalization Layer):旨在解决反向传播过程中的梯度,分别置于本坐姿识别算法中4个卷积层的后一层。
线性整流层(Rectified Linear Units Layer,ReLU Layer):使用激励函式f(x)=max(0,x)进行线性整流,避免卷积神经网络运算结果趋近0或无限大。旨在增强网络非线性特性与增加训练效率。分别置于本坐姿识别算法中4个批量标准化层的后一层。
池化层(Pooling Layer):旨在降低维度的同时保留重要特征,提高效率并减少过度拟合。本发明使用的坐姿识别算法中共有3层,均为最大化池化层,分别置于前3个线性整流层的后一层,池化尺寸为2×2,移动步长为2。
全连接层(Fully-Connected Layer):把所有区域性特征平坦化结合编程全域性特征,最后根据权重比例分类。本发明使用的坐姿识别算法坐垫的全连接输出根据压力坐垫的放置位置确定,椅背处的压力坐垫用来识别背部的姿势,座椅处压力坐垫识别躯体、腰部、腿部的姿势,根据预先定义的坐姿设置全连接层的尺寸,即坐姿分类结果。
Softmax层与输出层:归一化,输出分类的概率,输出得到最后结果。
步骤S3:坐姿状态识别。
在长时间的坐姿状态下,一定会有微幅姿态调整或大幅坐姿变换的非稳定状态。坐姿种类识别算法可以实现对某一时间点静态坐姿种类的识别,但是无法针对非稳定状态的坐姿进行有效识别。坐姿稳定状态即为两时间点之间维持静态坐姿,非稳定坐姿即两时间点之间坐姿发生变化。
本发明将前后两坐姿采集点数据的压力变异系数差、重心位置距离差和与座椅接触面积差作为决定稳定与非稳定两种坐姿差异的特征。
变异系数差:ΔP
重心位置距离差:ΔG=|G
与座椅接触面积差:ΔA=|A
同一被试同种坐姿的数据间相减得到归类为稳定状态数据,同一被试一组数据与不同坐姿的数据相减得到归类为非稳定状态数据。坐姿状态识别运用逻辑回归分析模型进行二分类法,输入两坐姿数据的压力变异系数差、重心位置距离和座椅接触面积差,经过模型的计算输出坐姿状态,稳定坐姿状态和非稳定坐姿状态两种结果。
步骤S4:坐姿识别结果修正与反馈。
坐姿种类识别算法借由输入32×32压力分布数据经过卷积神经网络训练的分类器识别得到静态坐姿种类输出;坐姿状态识别模型借由输入两坐姿之压力变异系数差、重心位置距离和座椅接触面积差,三项自变量得到稳定状态和非稳定状态两种坐姿状态输出。如果单位时间内有X个采集点,则静态坐姿种类有X个输入,坐姿状态有X-1个输入。若采集频率为1Hz,这里定义若两非稳定坐姿状态相差在3秒以下,则两非稳定状态间的所有坐姿状态皆认定为非稳定状态,意即连续维持5秒以上的稳定坐姿状态才归类为连续性稳定坐姿状态,连续4秒或少于4秒的稳定状态被归类为非稳定状态。
据此,在原先坐姿识别结果的基础上,增加动态坐姿作为一种新的坐姿种类对坐姿种类识别结果进行修正,意即连续非稳定坐姿状态区间内的坐姿种类归类为动态坐姿。修正过后的坐姿状态数据中,当坐姿状态连续出现两次以上非稳定状态,视为一次连续性非稳定状态坐姿,意即连续性非稳定状态坐姿为数个非稳定状态所组成。在连续性非稳定状态之第一个非稳定状态后的坐姿种类采集点,及最后一个非稳定状态前的坐姿采集点之间所有的坐姿种类修正为动态坐姿。
最终,借由坐姿种类识别算法与坐姿状态识别模型结合可达到识别坐姿种类中动态坐姿、坐姿识别结果最终修正的功能。
在一优选的实施方式中,本发明的人体坐姿识别系统可以计算各种坐姿随时间的变化并反馈给系统的使用者,最终反馈形式如图6所示。
在一优选的实施方式中,本发明的人体坐姿识别系统可以计算各种坐姿种类在采集时间内的时长并反馈给系统的使用者,最终反馈形式如图7所示。
在一优选的实施方式中,本发明的人体坐姿识别系统可以计算各种坐姿种类在采集时间内的所占比例并反馈给系统的使用者,最终反馈形式如图8所示。
在一优选的实施方式中,本发明的人体坐姿识别系统可以计算其它坐姿行为指标计算结果并反馈给系统的使用者。假设原先定义坐姿种类为N种,即坐姿1,坐姿2,…,坐姿N,坐姿数据采集总时间为T=nt秒,最终反馈形式如图9所示。
上述实施例为本发明较佳的实施方式,但本发明的实施方式并不受上述实施例的限制,其他的任何未背离本发明的精神实质与原理下所作的改变、修饰、替代、组合、简化,均应为等效的置换方式,都包含在本发明的保护范围。
- 基于压力坐垫的人体坐姿识别系统
- 坐姿判断方法及基于摄像头与压力传感器颈椎病识别系统