一种利用多旋翼无人机对输电线路巡检的方法
文献发布时间:2023-06-19 11:22:42
技术领域
本发明涉及无人机线路巡检技术领域,具体为一种利用多旋翼无人机对输电线路巡检的方法。
背景技术
输电线路是用变压器将发电机发出的电能升压后,再经断路器等控制设备接入输电线路来实现。结构形式,输电线路分为架空输电线路和电缆线路。架空输电线路由线路杆塔、导线、绝缘子、线路金具、拉线、杆塔基础、接地装置等构成,架设在地面之上。按照输送电流的性质,输电分为交流输电和直流输电。19世纪80年代首先成功地实现了直流输电。但由于直流输电的电压在当时技术条件下难于继续提高,以致输电能力和效益受到限制。19世纪末,直流输电逐步为交流输电所代替。交流输电的成功,迎来了20世纪电气化社会的新时代。
目前巡检以手动模式巡检为主,工作量大、效率低、安全隐患多、科学分析少、精度低、管理方式落后等问题。
发明内容
本发明的目的在于针对现有技术的不足之处,提供一种利用多旋翼无人机对输电线路巡检的方法,用来解决工作量大、效率低、安全隐患多、科学分析少、精度低、管理方式落后的问题。
为实现上述目的,本发明提供如下技术方案:包括无人机(1),所述无人机(1)的顶部固定连接有嵌入式计算单元(2),所述无人机(1)的底部固定连接有三维激光雷达模组(3),所述无人机(1)的一侧信号连接有遥控器(4),所述无人机(1)的底部远离三维激光雷达模组(3)的一侧固定连接有相机云台(5),所述相机云台(5)的内部设置有激光测距仪(6)。
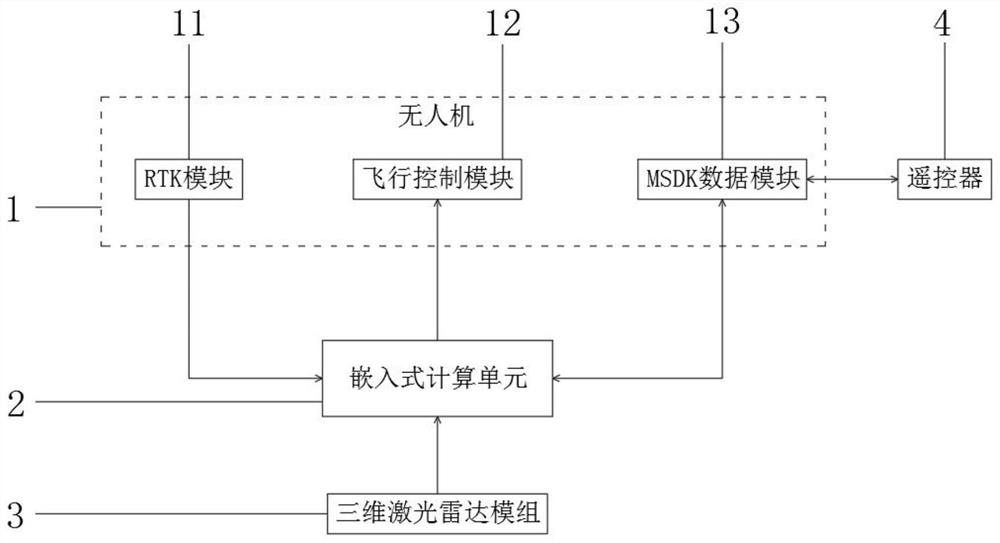
作为本发明的优选技术方案,所述无人机(1)的内部设置有RTK模块(11)、飞行控制模块(12)与MSDK数据模块(13),所述RTK模块(11)用于卫星定位测量,所述飞行控制模块(12)用于控制无人机(1)的飞行,所述MSDK数据模块(13)不仅能够用于将无人机(1)拍摄到的实时影像传回地面端,也能自动生成航线任务,所述RTK模块(11)与嵌入式计算单元(2)电性连接,所述三维激光雷达模组(3)与嵌入式计算单元(2)电性连接,所述嵌入式计算单元(2)与无人机(1)的飞行控制模块(12)电性连接。
作为本发明的优选技术方案,所述MSDK数据模块(13)与遥控器(4)呈双向通信连接,所述MSDK数据模块(13)与嵌入式计算单元(2)呈双向通信连接,所述遥控器(4)用于将无人机(1)的各项参数数据提供MSDK数据模块(13)输送到嵌入式计算单元(2)的内部,所述三维激光雷达模组(3)用于将点云数据输送到嵌入式计算单元(2)的内部。
作为本发明的优选技术方案,所述嵌入式计算单元(2)的内部包括缺陷识别模块(21),缺陷数据模块(22)、位置判断模块(23)、距离判断模块(24)、图像学习模块(25)与识别模块(26),所述遥控器(4)内部包括渲染模块(41)、显示模块(42)、用户交互模块(43)与杆塔台账数据模块(44),所述相机云台(5)内部包括转换模块(51)与图像输送模块(52)。
作为本发明的优选技术方案,所述转换模块(51)用于将HDMI转化为CSI,所述相机云台(5)与嵌入式计算单元(2)电性连接,所述缺陷数据模块(22)内部存储有大量的缺陷模型数据,所述缺陷识别模块(21)通过使用预先训练好的缺陷模型数据,对图像中导线存在的故障问题进行实时检测和识别,所述RTK模块(11)用于启动缺陷的位置,所述渲染模块(41)用于对导线的缺陷进行渲染,所述显示模块(42)用于将渲染过后的导线呈现在遥控器(4)的屏幕中。
作为本发明的优选技术方案,所述无人机(1)与激光测距仪(6)电性连接,所述位置判断模块(23)的输出端与飞行控制模块(12)的输入端信号连接,所述距离判断模块(24)的输出端与飞行控制模块(12)的输入端信号连接,所述位置判断模块(23)用于判断无人机(1)是否与导线位于同一水平位置,所述距离判断模块(24)用于检测导线与无人机(1)的距离。
作为本发明的优选技术方案,所述用户交互模块(43)与杆塔台账数据模块(44)信号连接,所述用户交互模块(43)用于实时的将线塔的数据输送到杆塔台账数据模块(44)的内部,所述杆塔台账数据模块(44)用于将数据输送到图像学习模块(25)的内部,所述图像学习模块(25)通过采集大量的线塔图样,进行标注分类,进行机器学习训练,使其能自动识别线路走线和塔头。
作为本发明的优选技术方案,所述相机云台(5)内部包括可见光相机、红外相机与变焦相机与激光测距仪(6),所述相机云台(5)用于在无人机(1)飞行的过程中对导线进行拍摄。
作为本发明的优选技术方案,包括以下步骤:
1)首先通过遥控器来对无人机进行各种参数的设定,当设定完成后,将无人机升起,并通过相机云台大致的观察无人机与导线的位置关系,之后启动无人机的飞行控制模块,从而使得无人机切换到自动飞行模式。
2)然后在飞行的过程中,通过激光测距仪来检测导线的位置,并将其检测的结果输送到嵌入式计算单元的内部,之后通过嵌入式计算单元内部的位置判断模块来检测无人机与导线的位置关系,若不在同一水平线,此时嵌入式计算单元将通过飞行控制模块来改变无人机的飞行位置,直到无人机与导线在同一水平位置,再之后通过距离判断模块来检测无人机与导线的距离,若超出设定的范围,则继续通过飞行控制模块来对无人机进行纠正。
3)在飞行的过程中,通过利用三维激光雷达模组来同时对飞行平台的前方和下方进行扫描采样,以此用以纠正航线和监测下方树障距离,以及自动避障。
4)在飞行的过程中,通过使用预先训练好的缺陷模型数据,对拍摄的图像中导线存在的故障问题进行实时检测和识别。
与现有技术相比,本发明提供了一种利用多旋翼无人机对输电线路巡检的方法,具备以下有益效果:
1、该一种利用多旋翼无人机对输电线路巡检的方法,通过遥控器来对无人机进行各种参数的设定,当设定完成后,将无人机升起,并通过相机云台大致的观察无人机与导线的位置关系,之后启动无人机的飞行控制模块,从而使得无人机切换到自动飞行模式,之后通过利用三维激光雷达模组来同时对飞行平台的前方和下方进行扫描采样,以此用以纠正航线和监测下方树障距离,以及自动避障。
2、该一种利用多旋翼无人机对输电线路巡检的方法,通过激光测距仪来检测导线的位置,并将其检测的结果输送到嵌入式计算单元的内部,之后通过嵌入式计算单元内部的位置判断模块来检测无人机与导线的位置关系,若不在同一水平线,此时嵌入式计算单元将通过飞行控制模块来改变无人机的飞行位置,直到无人机与导线在同一水平位置,再之后通过距离判断模块来检测无人机与导线的距离,若超出设定的范围,则继续通过飞行控制模块来对无人机进行纠正,通过上述操作能够自动实现无人机的仿线飞行。
3、该一种利用多旋翼无人机对输电线路巡检的方法,通过相机云台来对导线进行拍摄,并将其拍摄的数据通过转换模块来将HDMI转化为CSI,之后将转换的数据输送到嵌入式计算单元内部,此时其通过使用预先训练好的缺陷模型数据,对图像中导线存在的故障问题进行实时检测和识别,并通过RTK模块来对位置进行标注,之后将处理完成的数据输送到遥控器中,此时通过遥控器内部的渲染模块来对其进行渲染,之后通过显示模块在遥控器的显示屏中呈现出来,通过上述操作能够自动的对导线的缺陷进行识别标注,以此来减少漏检或误检的情况。
4、该一种利用多旋翼无人机对输电线路巡检的方法,通过杆塔台账数据模块来采集大量的线塔图样,并进行标注分类,以此来供机器学习训练,从而使其能自动识别线路走线和塔头,通过设置的用户交互模块,能够实时的将线塔的数据输送到杆塔台账数据模块内部,从而方便其扩充。
附图说明
图1为本发明无人机内部结构示意图;
图2为本发明导线缺陷检测结构示意图;
图3为本发明仿线仿线结构示意图;
图4为本发明自动识别线路走线和塔头结构示意图。
图中:1、无人机;11、RTK模块;12、飞行控制模块;13、MSDK数据模块;2、嵌入式计算单元;21、缺陷识别模块;22、缺陷数据模块;23、位置判断模块;24、距离判断模块;25、图像学习模块;26、识别模块;3、三维激光雷达模组;4、遥控器;41、渲染模块;42、显示模块;43、用户交互模块;44、杆塔台账数据模块;5、相机云台;51、转换模块;52、图像输送模块;6、激光测距仪。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
请参阅图1-4,本实施方案中:一种利用多旋翼无人机对输电线路巡检的方法,包括无人机1,无人机1的顶部固定连接有嵌入式计算单元2,无人机1的底部固定连接有三维激光雷达模组3,无人机1的一侧信号连接有遥控器4,无人机1的底部远离三维激光雷达模组3的一侧固定连接有相机云台5,相机云台5的内部设置有激光测距仪6。
本实施例中,无人机1的内部设置有RTK模块11、飞行控制模块12与MSDK数据模块13,RTK模块11用于卫星定位测量,飞行控制模块12用于控制无人机1的飞行,MSDK数据模块13不仅能够用于将无人机1拍摄到的实时影像传回地面端,也能自动生成航线任务,RTK模块11与嵌入式计算单元2电性连接,三维激光雷达模组3与嵌入式计算单元2电性连接,嵌入式计算单元2与无人机1的飞行控制模块12电性连接,;MSDK数据模块13与遥控器4呈双向通信连接,MSDK数据模块13与嵌入式计算单元2呈双向通信连接,遥控器4用于将无人机1的各项参数数据提供MSDK数据模块13输送到嵌入式计算单元2的内部,三维激光雷达模组3用于将点云数据输送到嵌入式计算单元2的内部,通过嵌入式计算单元2来控制无人机1的自动飞行,并记录三维激光雷达模组3输送的数据;嵌入式计算单元2的内部包括缺陷识别模块21,缺陷数据模块22、位置判断模块23、距离判断模块24、图像学习模块25与识别模块26,遥控器4内部包括渲染模块41、显示模块42、用户交互模块43与杆塔台账数据模块44,相机云台5内部包括转换模块51与图像输送模块52,介绍嵌入式计算单元2、遥控器4与相机云台5的内部各模块;转换模块51用于将HDMI转化为CS I,相机云台5与嵌入式计算单元2电性连接,缺陷数据模块22内部存储有大量的缺陷模型数据,缺陷识别模块21通过使用预先训练好的缺陷模型数据,对图像中导线存在的故障问题进行实时检测和识别,RTK模块11用于启动缺陷的位置,渲染模块41用于对导线的缺陷进行渲染,显示模块42用于将渲染过后的导线呈现在遥控器4的屏幕中,无人机1在跟线飞行的过程中,自动的识别导线的缺陷,并将其标注,最后显示在遥控器4的显示屏中;无人机1与激光测距仪6电性连接,位置判断模块23的输出端与飞行控制模块12的输入端信号连接,距离判断模块24的输出端与飞行控制模块12的输入端信号连接,位置判断模块23用于判断无人机1是否与导线位于同一水平位置,距离判断模块24用于检测导线与无人机1的距离,通过激光测距仪6,来对导线与无人机1之间的位置及其距离进行判断;用户交互模块43与杆塔台账数据模块44信号连接,用户交互模块43用于实时的将线塔的数据输送到杆塔台账数据模块44的内部,杆塔台账数据模块44用于将数据输送到图像学习模块25的内部,图像学习模块25通过采集大量的线塔图样,进行标注分类,进行机器学习训练,使其能自动识别线路走线和塔头,通过采集大量的线塔图样,进行标注分类,进行机器学习训练,使其能自动识别线路走线和塔头;相机云台5内部包括可见光相机、红外相机与变焦相机与激光测距仪6,相机云台5用于在无人机1飞行的过程中对导线进行拍摄。
本发明的工作原理及使用流程:首先通过遥控器4来对无人机1进行各种参数的设定,当设定完成后,将无人机1升起,并通过相机云台5大致的观察无人机1与导线的位置关系,之后启动无人机1的飞行控制模块12,从而使得无人机1切换到自动飞行模式,然后在飞行的过程中,通过激光测距仪6来检测导线的位置,并将其检测的结果输送到嵌入式计算单元2的内部,之后通过嵌入式计算单元2内部的位置判断模块23来检测无人机1与导线的位置关系,若不在同一水平位置,此时嵌入式计算单元2将通过飞行控制模块12来改变无人机1的飞行位置,直到无人机1与导线在同一水平位置,再之后通过距离判断模块24来检测无人机1与导线的距离,若超出设定的范围,则继续通过飞行控制模块12来对无人机1进行纠正,之后在飞行的过程中,通过利用三维激光雷达模组3来同时对飞行平台的前方和下方进行扫描采样,以此用以纠正航线和监测下方树障距离,以及自动避障,通过杆塔台账数据模块44来采集大量的线塔图样,并进行标注分类,以此来供机器学习训练,从而使其能自动识别线路走线和塔头,通过设置的用户交互模块43,能够实时的将线塔的数据输送到杆塔台账数据模块44内部,从而方便对数据其扩充,最后通过相机云台5来对导线进行拍摄,并将其拍摄的数据通过转换模块51来将HDMI转化为CSI,之后将转换的数据输送到嵌入式计算单元2内部,此时其通过使用预先训练好的缺陷模型数据,对图像中导线存在的故障问题进行实时检测和识别,并通过RTK模块11来对位置进行标注,之后将处理完成的数据输送到遥控器4中,此时通过遥控器4内部的渲染模块41来对其进行渲染,之后通过显示模块42在遥控器4的显示屏中呈现出来,通过上述操作能够自动的对导线的缺陷进行识别标注。
最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种利用多旋翼无人机对输电线路巡检的方法
- 一种利用多旋翼无人机测量铁塔法兰贴合率的方法