基于时空残差混合模型的城市路网短时交通流预测方法
文献发布时间:2023-06-19 11:26:00
技术领域
本发明属于深度学习和智能交通车流量预测领域,具体为一种基于时空残差混合模型的城市路网短时交通流预测方法。
背景技术
随着交通传感器的普及和新型传感器的布设,交通数据呈现爆炸式的增长,交通流预测很大程度上依赖于从各个传感器收集的历史和实时的交通流数据,包括GPS、摄像头、线圈等。交通流预测的目的是提供交通流信息,准确的交通流预测对于提高智能交通系统可靠性、安全性至关重要,可以为交通出行者和交通管理部门提供准确可靠的交通信息。
交通流预测方法大体分为模型驱动和数据驱动两类方法。模型驱动方法一般是根据理论假设预先确定的,存在理论性强,但实用性低,实际情况一般比理论假设的情况复杂;数据驱动方法主要是得益于日益增长的交通数据,传统数据驱动方法缺乏对高维数据的处理能力,随着深度学习理论的兴起,结合深度学习模型的数据驱动方法可以有效的对高维数据进行建模,并且可以捕获数据中的特征信息。为了捕获城市路网的时空信息,已经提出时空残差模型,该方法在空间上利用2D卷积进行空间特征挖掘,在时间上使用残差网络进行捕获,但是缺乏对时间序列的筛选,容易捕获相关度低的时间序列,并且残差方法在捕获变化微小特征时,容易忽略长期时间特征,从而降低模型的预测精度。
发明内容
发明目的:针对上述问题,本发明引入一种基于时空残差混合模型的城市路网短时交通流预测方法。该方法在传统时空残差模型的基础上,对时间序列引入皮尔逊相关系数的分析,确定相关性高的周期序列和邻近序列;引入LSTM神经网络作为混合模型,对周期序列和邻近序列进行长期时间特征的捕获,从而降低训练的误差,提高了预测的精度。
技术方案:一种基于时空残差混合模型的城市路网短时交通流预测方法,包括如下步骤:
步骤1)由配备有GPS定位装置的车辆采集车辆当前经纬度数据并存放至后台服务器Hadoop大数据集群数据库中,并对车辆经纬度原始数据集P进行预处理;
步骤2)将城市路网根据预测需求按照经纬度划分成M*N的交通栅格网络,将预处理过的车辆经纬度原始数据按照经纬度划分到每一个交通栅格网络中,生成交通栅格数据;
步骤3)将交通栅格数据进行标准化处理,使用标准化后的数据集构建训练集和测试集;
步骤4)构造基于时空残差混合模型的城市路网短时交通流预测模型,确定时空残差网络结构和混合模型的基本结构参数;
步骤5)使用训练集训练基于时空残差混合模型的城市路网短时交通流预测模型,并用测试集对模型进行测试;
进一步地,所述步骤1中,P={(P
进一步地,所述步骤2中,将城市路网按照经纬度划分成M*N的栅格网络,每一个栅格代表一个区域的交通状态,栅格网络记作S={s
进一步地,所述步骤3中,对处理过后的交通栅格数据进行标准化处理,通过下式计算
进一步地,所述步骤4中,构建基于时空残差混合模型的城市路网短时交通流预测模型,确定时空残差网络结构和混合模型的基本结构参数,具体步骤如下:
步骤4-1:构造时空残差网络模型,分为周期模块和邻近模块,具体步骤如下:
步骤4-1-1:利用2D卷积实现对空间特征的捕获,2D卷积公式为:X
步骤4-1-2:利用皮尔逊相关系数确定交通栅格数据的周期序列和邻近序列长度,皮尔逊相关系数由待预测的交通栅格数据
步骤4-1-3:设置时空残差网络模型的初始网络结构、确定卷积深度、残差单元个数和输出层数,输出矩阵维度;
步骤4-1-4:确定残差单元:
步骤4-2:构造混合模型用于捕获周期序列和邻近序列的长期时间特性,具体步骤如下:
步骤4-2-1:确定LSTM长短时神经网络作为混合模型捕捉长期时间特性;
步骤4-2-2:确定LSTM神经网络的初始网络结构、确定隐藏层层数和输出层层数,初始化训练步长λ,确定输出层状态矩阵H=(h
步骤4-2-3:设置LSTM神经网络输入层到隐藏层的连接矩阵U、隐藏层到隐藏层的连接矩阵W、隐藏层到输出层的连接权重V,U、W、V初始化时均为随机实数;
步骤4-2-4:设置LSTM神经网络的激活函数,规定输入门、遗忘门和输出门的激活函数均为Sigmod函数,单元状态的激活函数为tanh函数;
步骤4-3:构造基于时空残差混合模型的城市路网短时交通流预测模型,具体步骤如下:
步骤4-3-1:使用步骤4-1构造的时空残差网络模型,将交通栅格数据划分为周期序列和邻近序列,周期序列主要使用2D卷积实现空间特征的提取;邻近序列使用2D卷积结合残差单元实现局部微小变化特征的提取;分别得到周期序列
步骤4-3-2:将步骤4-3-1得到的周期序列和邻近序列分别输入步骤4-2构造的混合模型,提高两种序列的长期时间特性捕获能力;
步骤4-3-3:将步骤4-3-2输出得到的两种序列进行融合,具体公式为:
步骤4-3-4:使用RMSE均方根误差作为损失函数来计算预测值和实际值之间的误差,
进一步地,所述步骤5中,使用构造的训练集训练构建的基于时空残差混合模型的城市路网短时交通流预测模型预测下一时刻的交通栅格数据,并用测试集对模型进行测试,具体步骤如下:
步骤5-1:将训练集输入到基于时空残差混合模型的城市路网短时交通流预测模型,通过模型得到对应的实际输出
步骤5-2:使用RMSE均方根误差作为损失函数来计算预测值和实际值之间的误差,利用反向传播算法将每次运算的误差传递给时空残差混合模型中每一个可更新的参数,随后利用梯度下降算法更新每一个连接权重;
步骤5-3:设置迭代次数,在迭代中不断更新时空残差混合模型的连接权重;
步骤5-4:利用测试集数据测试模型训练效果,输入到时空残差混合模型,得到预测的交通栅格数据。
有益效果:本发明的短时交通流预测方法,该方法在时空残差网络模型的基础上,对时间序列引入皮尔逊相关系数的分析,确定相关性高的周期序列和邻近序列;引入混合模型,对周期序列和邻近序列进行长期时间特征的捕获,提高了预测的精度。
本发明针对传统时空残差模型缺乏对交通流数据进行相关性分析、捕获微小变化容易忽略长期时间特征等问题,提出一种基于时空残差混合模型的城市路网短时交通流预测方法,对时间序列引入皮尔逊相关系数的分析,确定相关性高的周期序列和邻近序列;引入LSTM神经网络作为混合模型,实现对周期序列和邻近序列长期时间特征的捕获,从而降低训练的误差,提高了短时交通流的预测精度,使得城市路网交通流预测具有更高的准确性和实用性。
附图说明
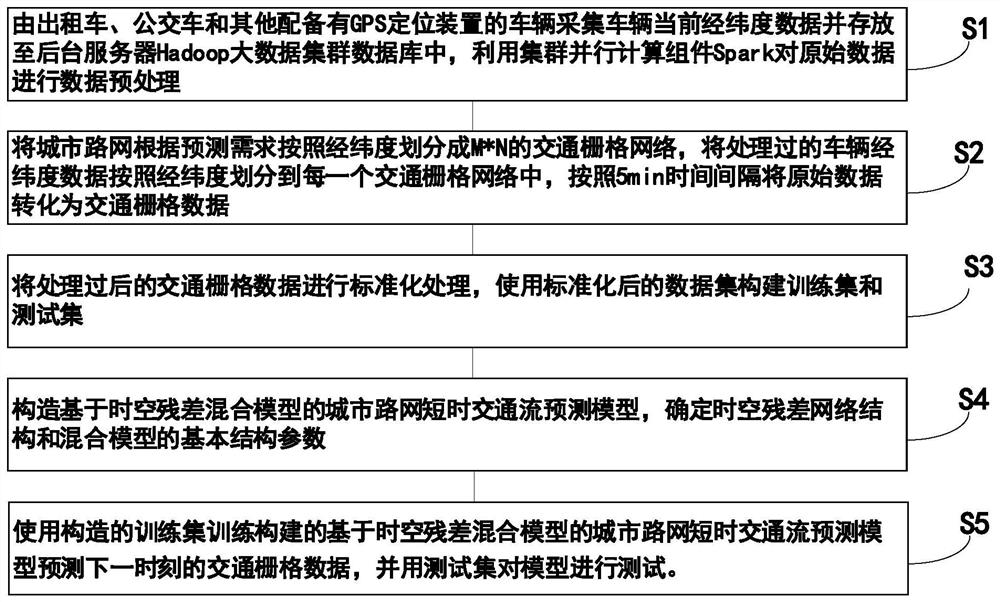
图1为本发明的基于时空残差混合模型的城市路网短时交通流预测方法步骤示意图;
图2为本发明的基于时空残差混合模型的城市路网短时交通流预测方法流程图;
图3为本发明的基于时空残差混合模型图;
图4为本发明的基于时空残差混合模型训练集损失值曲线图;
图5为本发明的基于时空残差混合模型测试集真实数据和预测数据对比图;
图6为本发明的基于时空残差混合模型测试集某一路口真实数据和预测数据对比图。
具体实施方法
下面结合说明书附图对本发明的技术方案做进一步的详细说明。
如图1-2所示,一种基于时空残差混合模型的城市路网短时交通流预测方法,包括如下步骤:
步骤1)由出租车、公交车和其他配备有GPS定位装置的车辆采集车辆当前经纬度数据并存放至后台服务器Hadoop大数据集群数据库中,利用集群并行计算组件Spark对原始数据进行数据预处理;
所述步骤1中,采集出租车、公交车和其他配有GPS定位装置车辆的经纬度数据,获得按时间排序的车辆原始数据集P,P={(P
步骤2)将城市路网根据预测需求按照经纬度划分成M*N的交通栅格网络,将处理过的车辆经纬度数据按照经纬度划分到每一个交通栅格网络中,按照5min时间间隔将原始数据转化为交通栅格数据;
所述步骤2中,将城市路网按照经纬度划分成M*N的栅格网络,每一个栅格代表一个区域的交通状态,栅格网络记作S={s
步骤3)将处理过后的交通栅格数据进行标准化处理,使用标准化后的数据集构建训练集和测试集;
所述步骤3中,对处理过后的交通栅格数据进行标准化处理,通过下式计算
步骤4)构造基于时空残差混合模型的城市路网短时交通流预测模型,确定时空残差网络结构和混合模型的基本结构参数;
所述步骤4中,构建基于时空残差混合模型的城市路网短时交通流预测模型,确定时空残差网络结构和混合模型的基本结构参数,具体步骤如下:
步骤4-1:构造时空残差网络模型,分为周期模块和邻近模块,具体步骤如下:
步骤4-1-1:利用2D卷积实现对空间特征的捕获,2D卷积公式为:X
步骤4-1-2:利用皮尔逊相关系数确定交通栅格数据的周期序列和邻近序列长度,皮尔逊相关系数由待预测的交通栅格数据
步骤4-1-3:设置时空残差网络模型的初始网络结构、确定卷积深度、残差单元个数和输出层数,输出矩阵维度;
步骤4-1-4:确定残差单元:
步骤4-2:构造混合模型用于捕获周期序列和邻近序列的长期时间特性,具体步骤如下:
步骤4-2-1:确定LSTM长短时神经网络作为混合模型捕捉长期时间特性;
步骤4-2-2:确定LSTM神经网络的初始网络结构、确定隐藏层层数和输出层层数,初始化训练步长λ,确定输出层状态矩阵H=(h
步骤4-2-3:设置LSTM神经网络输入层到隐藏层的连接矩阵U、隐藏层到隐藏层的连接矩阵W、隐藏层到输出层的连接权重V,U、W、V初始化时均为随机实数;
步骤4-2-4:设置LSTM神经网络的激活函数,规定输入门、遗忘门和输出门的激活函数均为Sigmod函数,单元状态的激活函数为tanh函数;
步骤4-3:构造基于时空残差混合模型的城市路网短时交通流预测模型,如图4所示,具体步骤如下:
步骤4-3-1:使用步骤4-1构造的时空残差网络模型,将交通栅格数据划分为周期序列和邻近序列,周期序列主要使用2D卷积实现空间特征的提取;邻近序列使用2D卷积结合残差单元实现局部微小变化特征的提取;分别得到周期序列
步骤4-3-2:将步骤4-3-1得到的周期序列和邻近序列输出分别输入步骤4-2构造的混合模型,提高两种序列的长期时间特性捕获能力;
步骤4-3-3:将步骤4-3-2输出得到的两种序列进行融合,具体公式为:
步骤4-3-4:使用RMSE均方根误差作为损失函数来计算预测值和实际值之间的误差,
步骤5)使用构造的训练集训练构建的基于时空残差混合模型的城市路网短时交通流预测模型预测下一时刻的交通栅格数据,损失值情况如图4所示,并用测试集对模型进行测试,实验结果如图5、图6所示。
所述步骤5中,使用构造的训练集训练构建的基于时空残差混合模型的城市路网短时交通流预测模型预测下一时刻的交通栅格数据,并用测试集对模型进行测试,具体步骤如下:
步骤5-1:将训练集输入到基于时空残差混合模型的城市路网短时交通流预测模型,通过模型得到对应的实际输出
步骤5-2:使用RMSE均方根误差作为损失函数来计算预测值和实际值之间的误差,利用反向传播算法将每次运算的误差传递给时空残差混合模型中每一个可更新的参数,随后利用梯度下降算法更新每一个连接权重;
步骤5-3:设置迭代次数,在迭代中不断更新时空残差混合模型的连接权重;
步骤5-4:利用测试集数据测试模型训练效果,输入到时空残差混合模型,得到预测的交通栅格数据。
本发明针对传统时空残差模型缺乏对交通流数据进行相关性分析、捕获微小变化容易忽略长期时间特征等问题,提出一种基于改进时空残差卷积神经网络的城市路网短时交通流预测模型。该模型将原始交通流数据转化成交通栅格数据,利用皮尔逊相关系数对交通栅格数据进行相关性分析,确定相关性高的周期序列和邻近序列,同时建立周期序列模型和邻近序列模型,引入长短时记忆神经网络作为混合模型提取时间特征,捕获两种序列的长期时间特征,从而降低训练的误差,提高了短时交通流的预测精度,使城市路网交通流预测具有更高的准确性和实用性。
以上所述仅为本发明在真实交通数据集下较好的实施方式,本发明保护范围并不以上述实施方式为限制,但凡本领域普通技术人员根据本发明所揭示内容所作的等效修改和其他修饰变化,皆应纳入权利要求书记载的保护范围。
- 基于时空残差混合模型的城市路网短时交通流预测方法
- 基于遗传算法优化时空残差模型的城市路网短时交通流预测方法