一种双圆弧少齿差减速传动装置及双圆弧齿形成方法
文献发布时间:2023-06-19 11:26:00
技术领域
本发明属于少齿差减速机装置技术领域,特别涉及一种双圆弧少齿差减速传动装置及双圆弧齿形成方法。
背景技术
双圆弧齿轮较单圆弧齿轮、渐开线齿轮有很多优势,在很多文献和专利里都有论述,如论文《双圆弧齿轮传动与单圆弧齿轮传动的对比分析》、中国专利文献,申请号为:2020209998264,名称:一种圆弧齿少齿差精密减速机、中国专利文献,申请号为:2016104027619,名称:一种双圆弧齿轮中均有公开。
在少齿差传动领域,由于少齿差减速传动具有传动比大、承载能力强、精度高、结构紧凑,已经在机器人、船舶航空、石油化工、精密机床得到越来越广泛的应用。
少齿差减速机领域,目前已经有摆线齿,单圆弧齿少齿差减速机,例如中国专利文献,申请号:CN891045333,名称为:圆弧齿轮针轮行星啮合传动机构,其采用的为单圆弧齿形。中国专利文献,申请号为2019104565831,名称为:一种双圆弧有隙啮合少齿差行星传动装置,在权利要求中“所述内齿轮的齿廓、外齿轮的齿廓均为圆弧”,在权利要求2中,详细说明了双“圆弧有隙啮合少齿差行星传动装置,所述内齿轮与外齿轮均具有圆弧状齿廓的轮齿”即内外齿两个齿轮齿形分别为单圆弧,在权利要求7里的齿形方程也是单圆弧齿廓方程。中国专利文献,申请号为:2017204239063,名称为:全滚柱减速机,在权利要求1里也描述了两个内外齿都是滚柱,也即齿形是单圆弧齿形;类似齿形的还有,中国专利文献,申请号为:2012203529899,名称为:一种滚柱减速机,也是采用的类似的滚柱圆弧齿形;目前都是单圆弧少齿差齿轮齿形,少齿差减速机领域目前国内外还没有见到有双圆弧齿形。
发明内容
本发明目的在于提供一种双圆弧少齿差减速传动装置及双圆弧齿形成方法;为达到上述目的所采取的技术方案是:
一种双圆弧少齿差减速传动装置,包括双圆弧内齿轮座,在双圆弧内齿轮座的内腔上绕周向设有双圆弧内齿轮齿,在双圆弧内齿轮座前端面转动连接有前端盖,在后端面转动连接有与前端盖固定连接的后端盖,在前端盖和后端盖之间同轴转动连接有输入轴套,在输入轴套中部设有正交布置的前偏心轴套和后偏心轴套,在前偏心轴套上转动连接有前齿盘,在后偏心轴套上转动连接有后齿盘,所述前齿盘和后齿盘的齿形均为双圆弧外齿轮齿,所述前齿盘和后齿盘均与双圆弧内齿轮齿少齿差啮合传动连接。
优选的,所述双圆弧内齿轮齿和双圆弧外齿轮齿的齿廓形状相同,其中,齿廓包括依次对称相连接的两个基本齿廓,所述基本齿廓包括依次平滑连接的首弧形段和尾弧形段,首弧形段和尾弧形段自由端处的法向方向交于双圆弧内齿轮座、前齿盘或者后齿盘的中心。
优选的,在首弧形段和尾弧形段之间依次平滑连接有至少一个中间弧形段。
一种如上所述的双圆弧少齿差减速传动装置中双圆弧内齿轮齿和双圆弧外齿轮齿的齿廓形成方法,其特征在于,所述双圆弧内齿轮齿和双圆弧外齿轮齿的齿廓形状相同,为了便于描述将其统称为双圆弧齿,包括如下步骤:
步骤A:确定双圆弧齿的首弧形段、中间弧形段和尾弧形段的基本齿廓方程为:
首弧形段方程为:
中间弧形段方程为:
尾弧形段方程为:
其中,其中θ
步骤B:确定首弧形段的圆心坐标(x
对于齿顶首弧形段,由于其圆心在齿廓中心线上,因此,X
其中半径r=1/K
步骤B1:半径r
P
其中
步骤B2:圆心坐标(x
x
步骤C:重复步骤B,同理可以确定出中间弧形段的圆心坐标(x
由内齿轮一段圆弧,根据啮合原理,可以求得共轭齿形方程,
x
y
z
其中R为理想共轭齿廓圆弧半径,r为内齿轮半径,e为内齿轮和中心外齿轮偏心距,u为齿宽;
依据理想齿廓方程,由下面公式求齿廓各点的曲率K
P
其中
根据上述公式,求取最大曲率半径K
根据半径r=1/K
z
(x
本发明所具有的有益效果为:
(1)双圆弧内齿轮齿、前齿盘的外齿、后齿盘的外齿均进行了重新设计,即均采用双圆弧齿啮合传动,首弧形段由内嵌的圆柱的一部分表面构成,中间弧形段通过精加工齿盘得到,中间弧形段两端处开设储油槽,这种结构便于加工设计,大大降低了制造难度,降低了成本。
(2)采用双圆弧啮合传动的方式,在齿形设计恰当时,其弯曲强度承载能力较渐开线齿轮可提高30%,同时在几何参数相同的情况下,同时参与啮合的接触点数更多,接触点分担的载荷更小。弯曲强度和接触强度更高,从而增大了径向承载能力。
(3)采用双圆弧啮合传动比较平稳,振动、噪音都比单圆弧齿轮小。
(4)通过齿盘固定机构的浮动固定、双圆弧齿啮合传动从而实现了一种整体结构紧凑、运行耐磨性高,精度高运行可靠的双圆弧少齿差减速传动装置。
(5)本发明针对少齿差减速传动装置领域的实际结构特征,对双圆弧齿的形成方法进行了理论设计,该方法设计出的双圆弧齿更易加工,能够满足本技术领域的使用要求。
附图说明
图1为本发明的立体结构示意图;
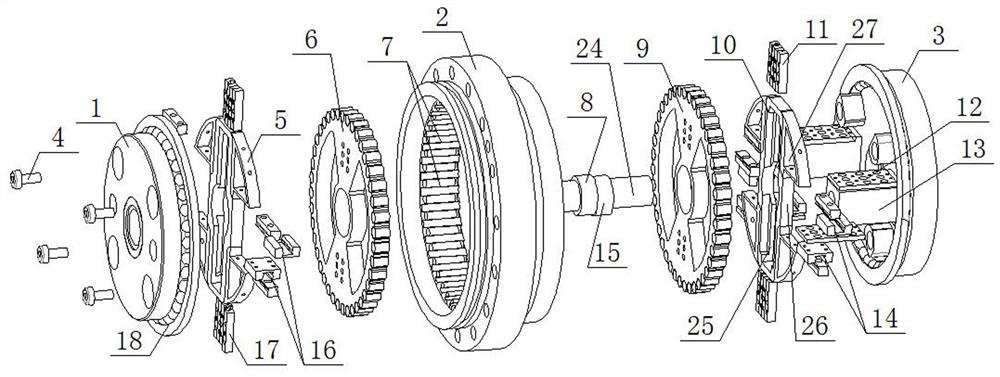
图2为图1的爆炸图;
图3为图1中的平切图;
图4为图1中的四分之一剖面图;
图5为双圆弧齿的齿廓示意图。
具体实施方式
下面结合附图对本发明进一步描述。
如图1至图5所示,一种双圆弧少齿差减速传动装置,包括双圆弧内齿轮座2,在双圆弧内齿轮座2的内腔上绕周向设有双圆弧内齿轮齿7,在双圆弧内齿轮座2前端面转动连接有前端盖3,在后端面转动连接有与前端盖3固定连接的后端盖1,在前端盖3和后端盖1之间同轴转动连接有输入轴套24,在输入轴套24中部设有正交布置的前偏心轴套15和后偏心轴套8,在前偏心轴套15上转动连接有前齿盘9,在后偏心轴套8上转动连接有后齿盘6,所述前齿盘9和后齿盘6的齿形均为双圆弧外齿轮齿,所述前齿盘9和后齿盘6均与双圆弧内齿轮齿少齿差啮合传动连接;具体地,少齿差啮合的齿差数可以包括1或者2或者3或者4或者更多齿差。
本发明主要是对啮合齿进行了改进设计,所述双圆弧内齿轮齿和双圆弧外齿轮齿的齿廓形状相同,为了便于描述将其统称为双圆弧齿,也包括多圆弧齿,如图4所示,具体地,所述双圆弧齿的齿廓包括依次对称相连接的两个基本齿廓19,所述基本齿廓19包括依次平滑连接的首弧形段20和尾弧形段22,在首弧形段20和尾弧形段22之间依次平滑连接有至少一个中间弧形段21,所述首弧形段20和尾弧形段22连接,首弧形段20和尾弧形段22自由端处的法向方向23交于内齿轮座2、前齿盘9或者后齿盘6的中心。
本实施例中,首弧形段20、中间弧形段21和尾弧形段22之间的平滑连接主要是为了易于加工做出来的拟合圆弧曲线,相邻两者之间也可以不相切,也不一定切到中点,在没切到的地方都开成储油槽。
本发明还对双圆弧齿的形成方法进行了理论设计,即包括如下步骤:
步骤A:确定双圆弧齿的首弧形段、中间弧形段和尾弧形段的基本齿廓方程为:
首弧形段方程为:
中间弧形段方程为:
尾弧形段方程为:
其中,其中θ
步骤B:确定首弧形段的圆心坐标(x
对于齿顶首弧形段,由于其圆心在齿廓中心线上,因此,X
其中半径r=1/K
步骤B1:半径r
P
其中
步骤B2:圆心坐标(x
x
步骤C:重复步骤B,同理可以确定出中间弧形段的圆心坐标(x
由内齿轮一段圆弧,根据啮合原理,可以求得共轭齿形方程,
x
y
z
其中R为理想共轭齿廓圆弧半径,r为内齿轮半径,e为内齿轮和中心外齿轮偏心距,u为齿宽;
依据理想齿廓方程,由下面公式求齿廓各点的曲率K
P
其中
根据上述公式,求取最大曲率半径K
根据半径r=1/K
z
(x
本实施例还公开了,前齿盘9和后齿盘6固定结构形式,即在前端盖3和后端盖1之间设有横向导轨13,在横向导轨13上沿径向滑动连接有前齿盘固定机构10和后齿盘固定机构5,所述前齿盘固定机构10位于前齿盘9与前端盖3之间,所述后齿盘固定机构5位于后齿盘6与后端盖1之间,所述前齿盘9与前齿盘固定机构10之间沿着径向滑动连接,所述后齿盘6与后齿盘固定机构5之间沿着径向滑动连接;
所述前齿盘9与前齿盘固定机构10之间的滑动方向、前齿盘固定机构10与横向导轨13之间的滑动方向互相垂直;所述后齿盘6与后齿盘固定机构5之间的滑动方向、后齿盘固定机构5与横向导轨13之间的滑动方向互相垂直。
其中,前齿盘固定机构10和后齿盘固定机构5的结构相同,为了便于描述将其统称为齿盘固定机构,所述齿盘固定机构包括圆形框架本体,在圆形框架本体内设有长方形空缺25,在长方形空缺25两侧对称设有开口朝外的U形空缺26,在U形空缺26上下方均设有扇形空缺27,所述横向导轨13位于对应的U形空缺26内,U形空缺26的内壁与横向导轨13之间沿径向滑动连接。
齿盘固定机构通过横向导轨13、前齿盘9与后齿盘6的共同作用限制,其特征在于,运动规律如下:
x=r
y=r
其中i为减速机减速比,e为偏心轴偏心距,r
对于沿径向滑动连接的具体结构,本实施例中优选的为:所述前齿盘9与前齿盘固定机构10之间、后齿盘6与后齿盘固定机构5之间均通过交叉滚子导轨11进行滑动连接从而限定直线方向的运动,所述U形空缺26的上下侧内壁与横向导轨13之间通过滑动副14沿径向滑动连接从而限定直线方向的运动;所述滑动副14的一个滑动组件通过连接板12对应固定在导轨13上,另一个滑动组件对应固定在U形空缺26的上下侧内壁上。
本实施例中,前齿盘固定机构对前齿盘进行浮动固定、后齿盘固定机构对后齿盘进行浮动固定的结构形式具有的优点为:
(1)本发明提供的一种齿盘固定机构是一种全新的机构形式,借鉴等宽凸轮机构结构,设计了一款全新的凸轮盘式齿盘固定机构,同时本发明通过机构设计实现了和等宽凸轮机构不一样的运动规律和结构,去除了等宽凸轮机构速度慢、易磨损、精度差的缺点,使得本发明提供的设计不仅具有等宽凸轮结构的优点,又具有了高速高精度的优点,能够用于高速高精密减速机场合。
(2)由于少齿差本身结构设计,径向力非常大,本发明采用新设计的齿盘固定机构来承担运转过程中的径向力,与双曲柄式结构不同,本设计可以有效缩小结构尺寸。
(3)本发明设计的机构在等宽方向的运动等效采用齿盘带动齿盘固定机构一起运动的方式进行,在垂直等宽方向的运动等效采用齿盘在齿盘固定机构上的滑动的方式进行,从而即保证了对前齿盘、后齿盘的固定也保证了运动精度。
(4)齿盘在齿盘固定机构上的滑动、齿盘固定机构在横向轨道上的滑动分别采用高精度交叉滚子导轨、滑动副进行导向,进一步提高了耐磨性,减小了扭转可能性,大大提高了固定可靠性。
本发明在工作时,首先将动力输入轴连入输入轴套24内,当带动输入轴套24转动的同时,在偏心轴套15和后偏心轴套8的作用下带动前齿盘9和后齿盘6与内齿轮齿7进行少齿差啮合传动,所述前齿盘9和后齿盘6在公转、自转的过程中本身可以在对应的前齿盘固定机构10和后齿盘固定机构5上径向滑动的同时也可以带动前齿盘固定机构10和后齿盘固定机构5一起在横向导轨13上进行另一个方向上的径向滑动从而保证了前端盖3、后端盖1以及两者之间的部分整体减速转动,进而在后端盖1上接入输出轴进行减速动力输出。
最后应说明的是:以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,但这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
- 一种双圆弧少齿差减速传动装置及双圆弧齿形成方法
- 一种双圆弧有隙啮合少齿差行星传动装置