越障装置及清洁机器人
文献发布时间:2023-06-19 11:30:53
技术领域
本发明属于智能家居技术领域,尤其涉及一种越障装置及清洁机器人。
背景技术
现代生活中,自主清洁装置的出现为地面的清洁提供了便利,降低了劳动强度。家用清洁机器人为常见的自主清洁设备,能在家庭房间内自动行进,并同时吸入周边的灰尘或杂质,从而完成地面清洁。
在家庭中,很多场合存在一些阶梯门槛,如阳台客厅、客厅卫生间、推拉门等,这些阶梯门槛会成为清洁机器人移动的障碍。为了使清洁机器人能够通过这些障碍物,通常采用在清洁机器人上设置有越障装置来实现脱困。而在具体设置中,采用将越障装置直接与滚轮连接来获得驱动力,而这样设置,由于直接连接在滚轮的表面,造成清洁机器人整体美观性差。
发明内容
有鉴于此,本发明提供一种越障装置及清洁机器人,以解决清洁机器人整体美观性差的问题。
为解决上述问题,本发明的技术方案是这样实现的:一种越障装置,用于安装在可移动的清洁机器人的壳体上,所述越障装置包括:变速箱,与所述壳体连接;行走轮,与所述变速箱连接;越障组件,用于转动抵压于障碍物上以抬升所述壳体;其中,所述越障组件与所述变速箱连接,以获得转动力。
优选地,所述行走轮和所述越障组件分别位于所述变速箱相对的两侧。
优选地,所述变速箱包括:箱体,包括相对设置的第一侧壁和第二侧壁;主动齿轮,与设置在所述壳体内的驱动件连接;变速齿轮组,与所述主动齿轮配合以改变转速;第一输出齿轮,与所述变速齿轮组相啮合,所述第一输出齿轮包括与所述行走轮连接的第一连接结构,所述行走轮设置在所述第一侧壁外侧;第二输出齿轮,与所述变速齿轮组相啮合,所述第二输出齿轮包括与所述越障组件连接的第二连接结构,所述越障组件设置在所述第二侧壁外侧。
优选地,所述变速箱包括:箱体,包括相对设置的第一侧壁和第二侧壁;主动齿轮,与设置在所述壳体内的驱动件连接;变速齿轮组,与所述主动齿轮配合以改变转速;输出齿轮,与所述变速齿轮组相啮合,所述输出齿轮相对于所述第一侧壁的一侧设置有与所述行走轮连接的第一连接结构,所述输出齿轮相对于所述第二侧壁的一侧设置有与所述越障组件连接的第二连接结构;其中,所述行走轮设置在所述第一侧壁外侧,所述越障组件设置在所述第二侧壁外侧。
优选地,所述第一连接结构为穿出于所述第一侧壁外与所述行走轮连接的第一输出轴;或为设置在所述第一输出齿轮上供所述行走轮连接的第一连接孔。
优选地,所述第二连接结构为穿出于所述第二侧壁外与所述越障组件的第二输出轴;或为设置在所述第二输出齿轮上供所述越障组件连接的第二连接孔。
优选地,所述越障组件包括:第一越障件,用于抵压于所述障碍物;支撑件,所述支撑件的一端与所述变速箱或与所述壳体连接,所述支撑件的另一端与所述第一越障件连接;传动件,所述传动件的一端与所述第二连接结构连接,所述传动件的另一端与所述第一越障件连接。
优选地,所述越障组件还包括:连接件,一端用于与所述传动件和所述第一越障件连接,另一端与所述支撑件连接;第二越障件,用于抵压于所述障碍物,所述第二越障件与所述支撑件和/或所述第一越障件连接;其中,所述第一越障件和所述第二越障件轮流抵压所述障碍物。
优选地,所述第一越障件包括:第一连接部,其一端用于与所述传动件和所述连接件连接;第一抵压部,设置在所述第一连接部的另一端,并具有向下弯曲的第一边缘接触部。
优选地,所述第二越障件包括:第二连接部,用于与所述第一越障件连接;第二抵压部,设置在所述第二连接部的一端,并具有向下弯曲的第二边缘接触部。
本发明还提供了一种清洁机器人,包括:上述的越障装置;壳体;驱动件,设置在所述壳体内,并与所述变速箱连接;其中,所述变速箱与所述壳体连接。
本发明所提供的一种越障装置,包括变速箱、行走轮和越障组件。通过采用将行走轮和越障组件设置成均与变速箱连接。从而,实现了直接由变速箱输出驱动力来驱使越障组件转动。此种设置方式,将越障组件和行走轮隔开不相连,越障组件无需由行走轮上获得驱动力,而且越障组件没有直接连接在行走轮上,使行走轮上没有连接有其它部件,提升了整体结构的美观性。
附图说明
为了更清楚地说明本发明实施例中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
图1是本发明实施例提供的越障装置结构示意图;
图2是本发明实施例提供的越障装置处于越障状态下的示意图;
图3是本发明实施例提供的变速箱的内部结构示意图;
图4是本发明实施例提供的变速箱另一状态下的内部结构示意图;
图5是本发明实施例提供的清洁机器人的局部剖面示意图。
附图标记说明:
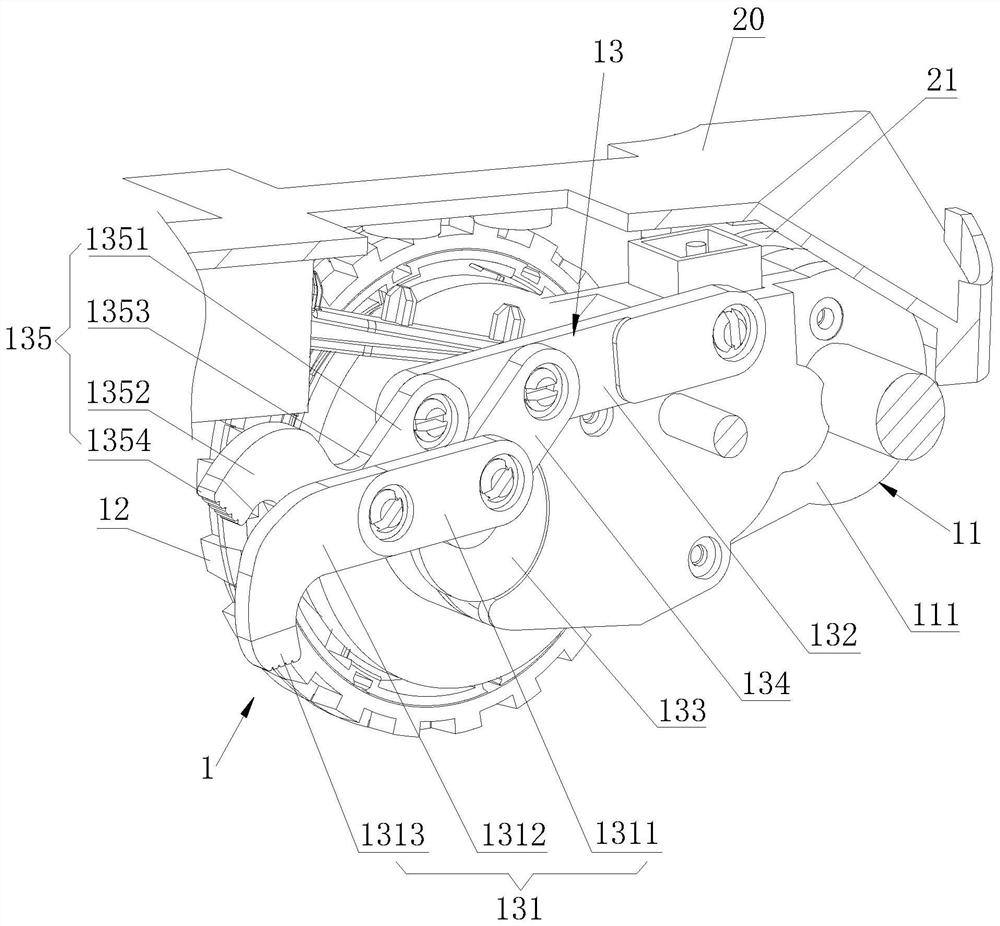
1、越障装置;11、变速箱;111、箱体;112、主动齿轮;113、变速齿轮组;114、第一输出齿轮;115、第二输出齿轮;12、行走轮;13、越障组件;131、第一越障件;1311、第一连接部;1312、第一抵压部;1313、第一边缘接触部;132、支撑件;133、传动件;134、连接件;135、第二越障件;1351、第二连接部;1352、第二抵压部;1353、弯折部;1354、第二边缘接触部;2、清洁机器人;20、壳体;21、驱动件。
具体实施方式
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
需要说明的是,术语“设置”、“连接”应做广义理解,例如,可以是直接设置、连接,也可以通过居中元部件、居中结构间接设置、连接。
在具体实施方式中所描述的各个具体技术特征和各实施例,在不矛盾的情况下,可以通过任何合适的方式进行组合,例如通过不同的具体技术特征/实施例的组合可以形成不同的实施方式,为了避免不必要的重复,本发明中各个具体技术特征/实施例的各种可能的组合方式不再另行说明。
如图1所示,本发明实施例提供的一种越障装置1,主要用于如玩具车或地面清洁装置等能在地面上移动的设备上的使用,以能够在此类设备需要进行越障时(如需要通过高度较低的阶梯门槛等障碍物,),可以起到在越障时的辅助支撑作用,以提高设备越障的通过能力。在本发明实施例中,采用将该越障装置1应用在清洁机器人上进行举例说明。具体地,将该越障装置1用于安装在可移动的清洁机器人的壳体上,通过越障装置1来实现清洁机器人的移动清洁,并在遇到障碍物时,能够起到帮助清洁机器人顺利通过障碍物的作用,避免出现清洁机器人由于被障碍物困住而无法正常清洁的情况发生。
如图1和图2所示,越障装置1包括变速箱11、行走轮12和越障组件13。变速箱11与壳体20连接,以实现装配连接,同时,变速箱11还连接有用于提供驱动力的驱动件21。而行走轮12和越障组件13均与变速箱11连接,从而能够获得由变速箱11传递输出的动力而实现转动,即行走轮12的转动便能够带动整个清洁机器人位置的移动,而越障组件13用于转动抵压在障碍物上,以能够抬升壳体20,因而越障组件13的转动便能够在需要越障时,起到将壳体20抬升而实现可靠越障的功能。在本发明实施例中,采用将行走轮12和越障组件13均与变速箱11连接,两个共用一个动力源的设置方式来获得驱动力,实现了将越障组件13直接与变速箱11连接来获取动力,使无需越障组件13无需与行走轮12连接,克服了将越障组件13直接与行走轮12连接所造成的局部结构复杂,影响整体美观性差的问题。
如图1所示,在本发明实施例中,优选采用将行走轮12和越障组件13分别设置在位于变速箱11相对的两侧。这样,行走轮12和越障组件13在转动的过程中互不干扰,确保转动的可靠性。
如图1和图3所示,该变速箱11包括箱体111、主动齿轮112、变速齿轮组113、第一输出齿轮114和第二输出齿轮115。箱体111包括相对设置的第一侧壁和第二侧壁,而且箱体111的内部为中空的结构,主动齿轮112、变速齿轮组113、第一输出齿轮114和第二输出齿轮115均安装在箱体111的内部。主动齿轮112与设置在壳体20内的驱动件21连接,以能够在驱动件21的驱使下转动;变速齿轮组113用于与主动齿轮112配合以改变转速。同时,第一输出齿轮114和第二输出齿轮115分别与变速齿轮组113相啮合,以能够按照设计规定,从变速齿轮组113上获取到不同转动的驱动力而实现转动。具体地,第一输出齿轮114包括与行走轮12连接的第一连接结构,而行走轮12设置在第一侧壁外侧,通过将行走轮12与第一连接结构实现连接,便能够获取到第一输出齿轮114上所传递的动力,进而实现行走轮12的转动。同样,第二输出齿轮115包括与越障组件13连接的第二连接结构,越障组件13设置在第二侧壁外侧。通过将越障组件13与第二连接结构实现连接,便能够获取到第二输出齿轮115上所传递的动力,进而实现越障组件13的转动。即,此种方式设置方式下,行走轮12和越障组件13分别连接于变速箱11内用于输出动力的不同输出齿轮上。而且,行走轮12和越障组件13分别位于变速箱11相对的两侧。
作为变速箱11结构的另一种实现方式,该变速箱11还可设置为包括箱体111、主动齿轮112、变速齿轮组113和输出齿轮。同样,该箱体111包括相对设置的第一侧壁和第二侧壁,而且箱体111的内部为中空的结构,主动齿轮112、变速齿轮组113和输出齿轮均安装在箱体111的内部。主动齿轮112与设置在壳体20内的驱动件21连接,以能够在驱动件21的驱使下转动;而变速齿轮组113用于与主动齿轮112配合以改变转速。而输出齿轮与变速齿轮组113相啮合,并采用在输出齿轮相对于第一侧壁的一侧设置有与行走轮12连接的第一连接结构,输出齿轮相对于第二侧壁的一侧设置有与越障组件13连接的第二连接结构,而行走轮12设置在第一侧壁外侧,越障组件13设置在第二侧壁外侧。这样设置,便实现了在同一个输出齿轮的相对两侧上分别设置有第一连接结构和第二连接结构,即将行走轮12和越障组件13连接在同一个输出齿轮的相对两侧,由同一个输出齿轮来带动行走轮12和越障组件13转动。而且行走轮12和越障组件13分别位于变速箱11相对的两侧,因而,此种设置方式,同样能够满足驱动行走轮12和越障组件13转动的使用需求。
具体地,在实际设置中,可将第一连接结构设置为穿出于第一侧壁外与行走轮12连接的第一输出轴,或为设置在第一输出齿轮114上供行走轮12连接的第一连接孔,设置方式灵活性好。即当将第一连接结构设置为第一输出轴时,该第一输出轴从第一侧壁穿出,而行走轮12上设置有能够与第一输出轴配合连接的轴孔,通过第一输出轴与轴孔的配合便能实现第一输出齿轮114与行走轮12的连接。而当将第一连接结构设置为第一连接孔时,则行走轮12上设置有能够由第一侧壁穿入到箱体111内与该第一连接孔相连的连接轴,通过连接轴和第一连接孔的配合而实现第一输出齿轮114与行走轮12的连接。
同样,在实际设置中,可将第二连接结构设置为穿出于第二侧壁外与越障组件13的第二输出轴,或为设置在第二输出齿轮115上供越障组件13连接的第二连接孔。即当将第二连接结构设置为第二输出轴时,该第二输出轴从第二侧壁穿出,而越障组件13上设置有能够与第二输出轴配合连接的轴孔,通过第二输出轴与轴孔的配合便能实现第二输出齿轮115与行走轮12的连接。而当将第二连接结构设置为第二连接孔时,则行走轮12上设置有能够由第二侧壁穿入到箱体111内与该第二连接孔相连的连接轴,通过连接轴和第二连接孔的配合而实现第二输出齿轮115与越障组件13的连接。
具体地,清洁机器人中通常成对设置有两个行走轮12,而每个行走轮12连接有一个变速箱11。因而,上述中的第一侧壁可以是指清洁机器人在使用状态下,两个变速箱11上相对设置且距离最近的两个侧壁,而此时的第二侧壁便是两个变速箱11上均朝外设置且距离最远的两个侧壁。当然,当第一侧壁为两个变速箱11上均朝外设置且距离最远的两个侧壁,那么,第二侧壁便为两个变速箱11上相对设置且距离最近的两个侧壁。
如图1和图2所示,在本发明实施例中,该越障组件13包括第一越障件131、支撑件132和传动件133。第一越障件131用于抵压于障碍物;支撑件132的一端与变速箱11或与壳体20连接,支撑件132的另一端与第一越障件131连接;传动件133的一端与第二连接结构连接,传动件133的另一端与第一越障件131连接。具体地,支撑件132与变速箱11或与壳体20的连接方式为活动连接,而且可以是直接连接,也可以是间接连接。传动件133用于将驱动力传递给第一越障件131,驱使第一越障件131能够转动抵压在障碍物上,进而实现将壳体20抬升,使壳体20与清洁面之间的距离大于障碍物的高度,以便能够在障碍物上顺利通过。而第一越障件131的运动轨迹是通过支撑件132来限制和引导,确保第一越障件131能够限定的转动范围内顺畅转动,并起到可靠越障的作用。
具体地,参照图1和图4,由于采用传动件133来将输出齿轮上的动力输出,以实现驱动第一越障件131转动。因而,该传动件133可以是传动轴,第二连接结构偏心设置在输出齿轮上,传动轴一端与第二连接结构连接,另一端与第一越障件131连接。当然,传动件133还可以是具有偏心轴的传动轮,而第二连接结构同轴设置在输出齿轮上,传动轮的一端与第二连接结构连接,而偏心轴则与第一越障件131连接。此种设置方式下,确保清洁装置在正常清洁状态时,第一越障件131不会干扰清洁装置的正常移动;而当清洁装置处于越障状态时,第一越障件131能够抵压在障碍物上而实现清洁装置的越障。
如图1和图3所示,越障组件13还包括连接件134和第二越障件135。连接件134的一端用于与传动件133和第一越障件131连接,另一端与支撑件132连接;第二越障件135用于抵压于障碍物,并第二越障件135与支撑件132和/或第一越障件131连接。这样设置,使该越障组件13实现了具有第一越障件131和第二越障件135来用于在越障时抵压在障碍物上,而且,第一越障件131和第二越障件135轮流抵压障碍物。从而在实际的越障当中,通过第一越障件131和第二越障件135轮流抵压在障碍物上,便能够实现将壳体20逐步抬升,进而避免壳体20碰触到障碍物而实现可靠越障。
如图1所示,由于第一越障件131和第二越障件135的运动轨迹是通过支撑件132来限制和引导,而支撑件132与第一越障件131之间活动连接,因而,第二越障件135的连接方式可以是直接与第一越障件131连接或直接与支撑件132连接,在本发明实施例中优选采用将第二越障件135同时与第一越障件131和支撑件132连接,而采用此种设置方式下,在支撑件132、传动件133、连接件134、第一越障件131和第二越障件135的各零件中,所有相互连接的部位都优选采用活动连接的方式,从而使越障组件13形成一个五连杆结构。而且,驱使整个越障组件13转动的驱动力由传动件133来传递,同时,在转动的过程中,第一越障件131和第二越障件135的运动轨迹通过支撑件132来限制和引导,以确保第一越障件131和第二越障件135能够按照规定的运动轨迹进行转动,进而在越障的过程中,能够持续抵压在障碍物上而将抬升壳体20,实现清洁装置的可靠越障。
如图1所示,第一越障件131包括第一连接部1311和第一抵压部1312。第一连接部1311的一端用于与传动件133和/或连接件134连接,而第一抵压部1312设置在第一连接部1311的另一端,并具有向下弯曲的第一边缘接触部1313。在第一越障件131转动进行越障时,通过第一边缘接触部1313抵压在障碍物上,便能够产生推顶力而实现将壳体20抬升。在具体设置,通常将第一越障件131通常采用一体成型的方式设置形成,而且优选将第一边缘接触部1313设置在位于第一越障件131的前端,而且弯曲的方向朝向于障碍物。从而,确保在进行越障时,第一越障件131上的第一边缘接触部1313能够最先与障碍物接触而产生抬升壳体20的作用力。同时,还可采用将第一边缘接触部1313至少与清洁面接触的一侧设置成连续弯曲的弧形,便可以提升第一边缘接触部1313在障碍物上转动时的顺畅性,降低与障碍物之间接触的摩擦力。而且,还可在第一边缘接触部1313最先与障碍物接触的位置设置有防滑槽或防滑凸起等防滑结构,确保第一边缘接触部1313在刚与障碍物接触时,不会发生打滑而实现可靠抵压越障。
如图1和图3所示,第二越障件135包括第二连接部1351和第二抵压部1352。第二连接部1351用于与第一越障件131连接,第二抵压部1352设置在第二连接部1351的一端,并具有向下弯曲的第二边缘接触部1354。同样,当第二越障件135需要抵压在障碍物上进行越障时,通过第二边缘接触部1354抵压在障碍物上,便能够产生推顶力而实现将壳体20抬升。在具体设置,通常将第二越障件135通常采用一体成型的方式设置形成,而且优选将第二边缘接触部1354设置在位于第二越障件135的前端,而且弯曲的方向朝向于障碍物。从而,确保在进行越障时,第二越障件135上的第二边缘接触部1354能够最先与障碍物接触而产生抬升壳体20的作用力。同时,还可采用将第二边缘接触部1354至少与清洁面接触的一侧设置成连续弯曲的弧形,便可以提升第二边缘接触部1354在障碍物上转动时的顺畅性,降低与障碍物之间接触的摩擦力。而且,还可在第二边缘接触部1354最先与障碍物接触的位置设置有防滑槽或防滑凸起等防滑结构,确保第二边缘接触部1354在刚与障碍物接触时,不会发生打滑而实现可靠抵压越障。
具体地,由于在实际使用当中,需要第一越障件131和第二越障件135轮流抵压障碍物,即第一越障件131先抵压在障碍物上将壳体20抬升,然后第二越障件135再抵压于障碍物而将壳体20再次抬升。因而,为实现第一边缘接触部1313和第二边缘接触部1354能够依次轮流抵压在障碍物上,如图1所示,采用将第二连接部1351还设置与第二边缘接触部1354弯曲方向相反的弯折部1353,即弯折部1353与第二边缘接触部1354为连续且反向弯曲的结构。这样,该弯折部1353便能够实现将第二边缘接触部1354的位置相对于第一边缘接触部1313的位置而向上抬升一定高度,从而,实现了第一边缘接触部1313和第二边缘接触部1354的错位设置,确保第二边缘接触部1354能够晚于第一边缘接触部1313抵压在障碍物上。
本发明实施例中所提供的越障装置,通过采用将行走轮和越障组件设置成均与变速箱连接。从而,实现了直接由变速箱输出驱动力来驱使越障组件转动。此种设置方式,将越障组件和行走轮隔开不相连,越障组件无需由行走轮上获得驱动力,而且越障组件没有直接连接在行走轮上,使行走轮上没有连接有其它部件。并且,越障组件13与行走轮12分别位于变速箱11相对的两侧,避免了由于将行走轮12和越障组件13设置在同一侧而导致的结构复杂度增加,提升了整体结构的美观性。
如图5所示,本发明实施例中还提供了一种清洁机器人2,包括上述的越障装置1、壳体20和驱动件21(参照图1)。驱动件21设置在壳体20内,并与变速箱11连接;而变速箱11与壳体20连接。驱动件21用于向变速箱11内输入驱动力而使变速箱11内的齿轮组转动,进而在经过变速箱11的变速输出后,能够使行走轮12越障装置1转动而实现相应的使用功能。本清洁机器人2通过采用上述的越障装置1,而上述的越障装置1中的越障组件13不与行走轮12直接相连,而且分别位于变速箱11相对的两侧。这样,克服了由于将行走轮12和越障组件13设置在同一侧而导致的结构复杂度增加,影响整体美观性的问题,使清洁机器人2整体的美观性得到了提升。
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
- 越障光伏清洁机器人及其越障方法
- 清洁机器人的跨越障碍物方法、清洁机器人以及存储介质