一种连续可变气门升程控制装置和发动机
文献发布时间:2023-06-19 11:37:30
技术领域
本发明属于发动机技术领域,具体涉及一种连续可变气门升程控制装置和发动机。
背景技术
发动机气门升程技术是近年来比较热门发动机燃效研究领域。
现有已知的发动机可变气门升程控制技术有阶段式可变式和连续可变式,其中连续可变式又有机械式和液压式之分;目前现有技术中的阶段可变式气门升程控制技术1)只能阶段性离散控制气门的升程,常见两段式和三段式,无法连续改变气门升程,导致发动机工况控制不线性,不利于驾驶的平顺;2)依靠多组不同升程大小的凸轮实现气门升程的改变,导致凸轮轴非常复杂,加工困难,零部件数量显著上升,成本增加;现有技术中的连续可变式气门升程控制技术1)目前已知的机械式连续可变式气门升程控制技术都有一个共同特点,都是在传统固定气门升程发动机的气门摇臂和凸轮轴之间增加一组机构(中间摇臂)来实现气门升程的可变;这种结构导致机构非常复杂,零部件数大幅增加,系统高速动态响应刚性不好,复杂的配气机构导致发动机缸盖高度显著增大,制造成本亦显著增加;2)液压式的连续可变式气门升程控制技术依靠电磁阀的通断用液压油缸控制气门的开闭,系统十分复杂,加工精度要求高,对油液的清洁度要求苛刻,不利于提升可靠性;同时造价昂贵,后期使用维护保养复杂。
现有技术中的“气门可变升程”技术均无法同时兼备“简单可靠”、“成本低廉”和“体积空间小”的特性,因此需要提供一种全新的连续可变的发动机气门升程控制装置。
发明内容
针对现有技术的缺陷,本发明提供了一种连续可变气门升程控制装置和发动机,能够兼备简单可靠、成本低廉和体积空间小的特性。
为了实现上述目的,本发明提供了一种连续可变气门升程控制装置,包括气门组件、调节凸轮、摇臂和驱动凸轮,摇臂能够围绕其位于调节凸轮处的第一端部进行摆动,摇臂的第二端部与气门组件相连接,驱动凸轮作用于摇臂上并驱动摇臂的第二端部围绕其第一端部进行摆动以带动气门组件进行上下运动。
根据本发明的另一种具体实施方式,摇臂提供与驱动凸轮相抵接而相互作用的一作用点,调节凸轮的回转能够改变该一作用点的高度。
根据本发明的另一种具体实施方式,该一作用点为设置于摇臂的第一端部和其第二端部之间的滚轮,滚轮与驱动凸轮的轮缘相抵接。
根据本发明的另一种具体实施方式,摇臂的第一端部可转动地设置在调节凸轮上,具体为摇臂的第一端部可转动地设置在调节凸轮的非回转中心处,调节凸轮的回转能够带动摇臂的第一端部以圆弧轨迹进行摆动,在调整摇臂位姿的同时改变滚轮的高度。
根据本发明的另一种具体实施方式,滚轮位于摇臂的中央。
根据本发明的另一种具体实施方式,进一步包括调节摆臂,调节摆臂通过一铰接点连接在摇臂上,调节凸轮的回转能够作用于调节摆臂的第一端部而使调节摆臂围绕该一铰接点转动,该一作用点为设置于调节摆臂的第二端部上的滚子。
根据本发明的另一种具体实施方式,摇臂的第一端部铰接在调节凸轮的回转轴上,调节摆臂的第一端部与调节凸轮之间抵接而相互作用;或
调节摆臂的第一端部铰接在调节凸轮的回转轴上,摇臂的第一端部与调节凸轮之间抵接而相互作用;
调节凸轮的回转能够带动调节摆臂的第二端部上的滚子以圆弧轨迹进行摆动,在改变调节摆臂与摇臂之间的夹角的同时改变调节摆臂的第二端部的高度,此过程中摇臂的位姿不产生变化。
根据本发明的另一种具体实施方式,该一铰接点位于摇臂的中央。
根据本发明的另一种具体实施方式,驱动凸轮的回转中心位于该一作用点的正上方。
本发明同时提供一种采用上述的连续可变气门升程控制装置的发动机。
本发明具备以下有益效果:
本发明使用机械结构控制的方法实现气门升程的连续可变,相比现有技术,动作执行机构的零件数量大幅减少,机构重量大幅降低,机构动作响应快速可靠,可在快速稳定连续不间断切换气门升程的同时,显著降低零部件数量和装配难度,使发动机气门升程机构整体成本显著降低,利于市场大规模推广应用。
下面结合附图对本发明作进一步的详细说明。
附图说明
图1是本发明连续可变气门升程控制装置实施例1的原理示意图,其显示出滚轮处于第一位置的位姿;
图2是本发明连续可变气门升程控制装置实施例1的原理示意图,其显示出滚轮处于第二位置的位姿;
图3是本发明连续可变气门升程控制装置实施例1气门升程的变化过程示意图;
图4是本发明连续可变气门升程控制装置实施例1的一种结构示意图;
图5是本发明连续可变气门升程控制装置实施例1的另一结构示意图;
图6是本发明连续可变气门升程控制装置实施例2的原理示意图,其显示出调节摆臂与摇臂之间的形成了较大夹角;
图7是本发明连续可变气门升程控制装置实施例2的原理示意图,其显示出调节摆臂与摇臂之间的形成了较小夹角;
图8是本发明连续可变气门升程控制装置实施例2气门升程的变化过程示意图;
图9是本发明连续可变气门升程控制装置实施例2的一种结构示意图;
图10是本发明连续可变气门升程控制装置实施例2的另一结构示意图。
具体实施方式
为了能够更清楚地理解本发明的上述目的、特征和优点,下面结合附图和具体实施方式对本发明进行进一步的详细描述。需要说明的是,在不冲突的情况下,本申请的实施例及实施例中的特征可以相互组合。
在下面的描述中阐述了很多具体细节以便于充分理解本发明,但是,本发明还可以采用其他不同于在此描述的其他方式来实施,因此,本发明的保护范围并不限于下面公开的具体实施例的限制。
本实施例提供了一种机械式连续可变气门升程控制装置,通过驱动围绕其自身一端部摆动的摇臂进行连续摆动以驱动气门组件进行上下运动,如图1、图2所示,其动作原理为:
以与摇臂L1的左端铰接的偏心摆销O1为摆动支点;
其中偏心摆销O1随着气门升程调节偏心轴R1进行同步转动,气门升程调节偏心轴R1围绕其回转中心进行转动时,可使偏心摆销O1的高度发生变化,进而改变位于摇臂L1上的滚轮W1的位置高度;
滚轮W1下压的有效行程发生改变,在驱动凸轮的回转驱动下(驱动凸轮提供竖直向下的作用力F1,使得气门组件获得竖直向下的作用力F2),实现气门升程的连续可变,即图2中气门实际升程h2大于图1中气门实际升程h1。
具体的,为了更好的显示上述变化过程,图3对比显示出气门升程调节偏心轴R1的相位由0°依次变化到90°、180°和270°的示意图,可以看出,气门的最大升程是不同的,也即可以实现气门升程的连续可变。
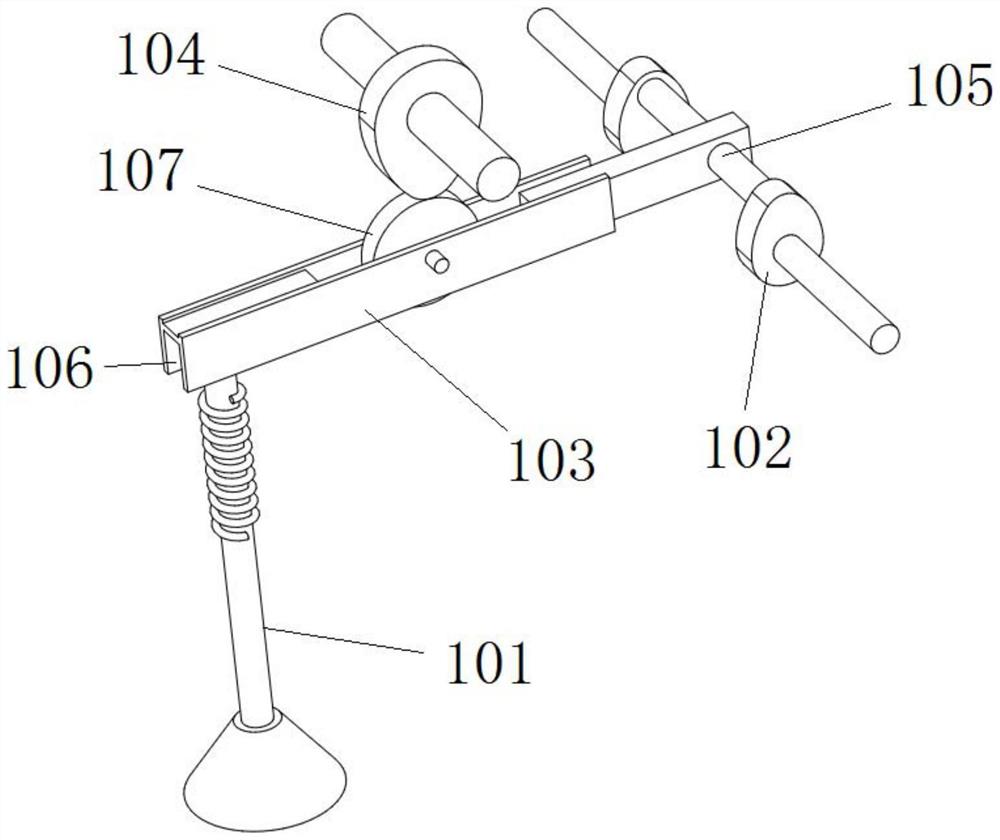
一种基于上述原理的连续可变气门升程控制装置的一种具体结构如图4所示,包括气门组件101、调节凸轮102、摇臂103和驱动凸轮104。
摇臂103具有第一端部105和第二端部106,其中摇臂103的第二端部106与气门组件101相连接,摇臂103的第一端部105可转动地设置在调节凸轮102处,摇臂103整体能够围绕其第一端部105进行摆动。
具体的,摇臂103的第一端部105可以直接铰接在调节凸轮102的回转轴上,摇臂103的第一端部105也可以搭接(例如在第一端部105设置有与轴配合的圆弧结构)在调节凸轮102的回转轴上,摇臂103的第一端部105还可以通过连接机构与调节凸轮102的回转轴进行转动连接,其他通过调节凸轮102的回转能够带动摇臂103的第一端部105产生高度变化的结构理应在保护范围之内,这里不再进行一一列举和展开。
进一步的,驱动凸轮104位于摇臂103的上方一侧,气门组件101位于摇臂103的下方一侧,摇臂103提供与驱动凸轮104相抵接而相互作用的一作用点,调节凸轮102的回转能够改变该一作用点的高度。
再进一步的,在摇臂103上设有自转动的滚轮107,滚轮107提供该一作用点,滚轮107通过例如销连接的方式设置于摇臂103的第一端部105和其第二端部106之间,优选的,滚轮107位于摇臂103的中部,驱动凸轮104的回转中心位于滚轮107的正上方,滚轮107与驱动凸轮104的轮缘相抵接。
其中在气门组件101上设有回弹结构,以通过摇臂103保持驱动凸轮104与滚轮107始终接触。
本实施例通过驱动凸轮104作用于摇臂103中部的滚轮107上,驱动摇臂103的第二端部106围绕其第一端部105进行摆动以带动气门组件101进行上下运动,调节凸轮102的回转能够带动摇臂103的第一端部105以圆弧轨迹进行摆动,在调整摇臂103位姿的同时改变滚轮107的高度,滚轮107下压的有效行程发生变化,在驱动凸轮104的作用下,进而得到不同的气门升程。
相应的,可以根据实际需求设计摇臂103的结构形式以适应不同的气门结构,例如图5中将摇臂103设置为具有固定连接的两段,其中两段之间可以根据需要设置满足要求的夹角大小,本实施例中其他零部件的相应形状和尺寸均可按照设计需求进行适应性调整,这里不再展开。
本实施例提供了一种机械式连续可变气门升程控制装置,通过驱动围绕其自身一端部摆动的摇臂进行连续摆动以驱动气门组件进行上下运动,如图6、图7所示,其动作原理为:
将摇臂L2的左端固定铰接形成摆动支点;
提供与摇臂L2相铰接的调节摆臂L3,其中调节摆臂L3的左端与位于气门升程调节偏心轴R2上的偏心摆销O2相接触;
气门升程调节偏心轴R2围绕其回转中心进行转动时,可使偏心摆销O2的高度发生变化,进而改变调节摆臂L3和摇臂L2之间的夹角大小,即图6中的夹角α1大于图7中的夹角α2,偏心摆销O2的高度变化通过杠杆形式会传递形成调节摆臂L3的右端的高度位置变化;
调节摆臂L3的右端下压的有效行程发生改变,在驱动凸轮的回转驱动下(驱动凸轮提供竖直向下的作用力F3,使得气门组件获得竖直向下的作用力F4),实现气门升程的连续可变,即图6中气门实际升程h3大于图7中气门实际升程h4。
具体的,为了更好的显示上述变化过程,图8对比显示出气门升程调节偏心轴R2的相位由0°依次变化到45°、90°和180°的示意图,可以看出,气门的最大升程是不同的,也即可以实现气门升程的连续可变。
一种基于上述原理的连续可变气门升程控制装置的一种具体结构如图9所示,包括气门组件201、调节凸轮202、摇臂203、调节摆臂204和驱动凸轮205。
摇臂203具有第一端部206和第二端部207,其中摇臂203的第二端部207与气门组件201相连接,摇臂203的第一端部206铰接在调节凸轮202的回转轴上,摇臂203整体能够围绕其第一端部206进行摆动。
进一步的,驱动凸轮205位于摇臂203的上方一侧,气门组件201位于摇臂203的下方一侧,调节摆臂204通过一铰接点208(例如销接)连接在摇臂203上,其中该一铰接点208优选位于摇臂203的中央,调节摆臂204的第一端部210与调节凸轮202之间抵接而相互作用,在调节摆臂204的第二端部211设有滚子209,滚子209提供与驱动凸轮205相抵接而相互作用的一作用点。
再进一步的,驱动凸轮205的回转中心位于滚子209的正上方,滚子209与驱动凸轮205的轮缘相抵接,其中在气门组件201上设有回弹结构,以通过摇臂203保持驱动凸轮205与滚子209始终接触。
具体的,调节凸轮202的回转能够带动调节摆臂204的第二端部211上的滚子209以圆弧轨迹(围绕调节凸轮202的回转轴)进行摆动,在改变调节摆臂204与摇臂203之间的夹角的同时改变调节摆臂204的第二端部211高度,此过程中摇臂203的位姿不产生变化。
本实施例通过驱动凸轮205作用于调节摆臂204的第二端部211上的滚子209,驱动摇臂203的第二端部207围绕其第一端部206进行摆动以带动气门组件201进行上下运动,调节凸轮202的回转能够带动调节摆臂204上的滚子209沿圆弧轨迹(以调节摆臂204和摇臂203的铰接点208为中心)进行摆动,在保持摇臂203位姿不变的同时,改变调节摆臂204上滚子209的高度,滚子209下压的有效行程发生变化,在驱动凸轮205的作用下,进而得到不同的气门升程。
本实施例中摇臂203的第一端部206铰接在调节凸轮202的回转轴上,调节摆臂204的第一端部210与调节凸轮202之间抵接而相互作用,在其他示例中,同理,也可以将调节摆臂204的第一端部210铰接在调节凸轮202的回转轴上,摇臂203的第一端部206与调节凸轮202之间抵接而相互作用。
相应的,可以根据实际需求设计调节摆臂204的结构形式以适应不同的气门结构,例如图5中在调节摆臂204上设置了两组滚子209,通过两组驱动凸轮205进行同步驱动;本实施例中其他零部件的相应形状和尺寸均可按照设计需求进行适应性调整,这里不再展开。
虽然本发明以较佳实施例揭露如上,但并非用以限定本发明实施的范围。任何本领域的普通技术人员,在不脱离本发明的发明范围内,当可作些许的改进,即凡是依照本发明所做的同等改进,应为本发明的范围所涵盖。
- 发动机连续可变气门升程机构、具有其的发动机和车辆
- 一种可变气门升程机构、控制气门升程的方法及发动机