一种稳定平台伺服控制系统
文献发布时间:2023-06-19 11:45:49
技术领域
本发明涉及光电吊舱的控制系统,具体涉及一种稳定平台伺服控制系统。
背景技术
目前机载光电吊舱系统发展迅速,广泛应用于军事和民用领域。稳定平台控制系统是光电吊舱的关键部分,作为成像系统的搭载设备,用来隔离机体和外部环境扰动,在保持视轴稳定的同时保证传感器成像清晰,机载稳定平台对稳定精度的要求越来越高。在机载光电稳定平台工作过程中,机载光电稳定平台的模型不能精确获得,其系统本身的特性受外界环境的影响而变化,同时力矩、传感器执行器等噪声干扰也是不确定的。为解决机载光电平台的上述不确定性问题,需要利用高精度稳定平台控制系统来提高系统的稳定精度。传统的稳定平台控制系统主要存在以下缺点:
1)传统的电机伺服控制方法以及单一传感器反馈信息已经无法满足控制系统的稳定精度需求;
2)采用压电陀螺作为机载光电稳定平台控制系统的关键元件,而压电陀螺本身存在着游走噪声大,信号噪声水平和带宽受加速度信号影响等缺点;
3)对于机械谐振在保证控制带宽的条件下并没有合理的方法对其抑制,因而在稳定平台带载后,惯量发生变化,自身存在固有的机械谐振问题,在不降低控制带宽情况下难以进行抑制;
4)稳定平台伺服控制系统的伺服控制模块多采用二次电源、伺服控制器、主控电路板等多电路板集成的方式,具有体积大、重量大等缺陷。
发明内容
本发明的目的是解决传统的电机伺服控制系统不能满足系统的精度要求,机械谐振难以抑制,且存在体积和重量较大的技术问题,提出一种稳定平台伺服控制系统,具有响应速度快、控制精度高、体积小和重量轻的特点。
为了实现上述目的,本发明所采用的技术方案是:
一种稳定平台伺服控制系统,包括DC/DC、方位轴伺服单元和俯仰轴伺服单元;方位轴伺服单元包括设置在方位轴上的方位电机、方位光纤陀螺、设置在方位电机输出轴上的方位编码器以及方位轴控制组件;俯仰轴伺服单元包括设置在俯仰轴上的俯仰电机、俯仰光纤陀螺、设置在俯仰电机输出轴上的俯仰编码器以及俯仰轴控制组件;其特殊之处在于:
所述方位轴控制组件包括FPGA、DSP、三相桥、PWM驱动电路、电流采集电路、AD转换电路及通信电路;
所述FPGA分别与方位编码器、方位光纤陀螺、AD转换电路及通信电路连接,用于实现方位轴的角度采集、速度采集及相电流采集,将采集信号送入DSP,以及实现多路数据通信;
所述DSP分别与FPGA及PWM驱动电路及外部POS系统的反馈位置信号相连,用于实现SVPWM控制算法或SPWM控制算法,以及方位轴的电流、速度和位置三闭环控制算法,并生成PWM脉冲送入PWM驱动电路;DSP包括位置环控制器、速度环控制器、电流环控制器,以及PWM发生器;
所述位置环控制器,用于对方位轴的位置偏差进行跟踪控制,所述位置偏差是通过方位轴位置信号与外部POS系统的反馈位置信号进行减法运算获得;
所述速度环控制器,用于对方位轴的速度偏差进行跟踪控制,所述速度偏差是通过位置环控制器输出的速度信号,与方位光纤陀螺输出的速度信号经速度解算后的信号,进行减法运算后获得;
所述电流环控制器,包括q轴电流控制器、d轴电流控制器、对方位电机相电流进行依次变换的Clark变换模块、Park变换模块及Park逆变换模块;采用所述方位编码器输出的方位电机的电角度对Park变换和Park逆变换进行调制;
所述Park变换模块输出直轴电流分量i
所述PWM发生器为SVPWM发生器或SPWM发生器,用于把电流环控制器得到的电压 矢量
所述PWM驱动电路的输出端与三相桥连接,用于将DSP输出的PWM脉冲信号转换为驱动三相桥工作的PWM驱动信号;
所述三相桥用于驱动方位电机运行;
所述电流采集电路的输入端与三相桥连接,用于采集三相桥的2相电流,并将2相电流送入AD转换电路;所述AD转换电路用于将接收的2相电流进行数字转换,并将转换后的数字信号送入FPGA;
所述俯仰轴控制组件与方位轴控制组件结构完全相同。
进一步地,为了抑制系统的机械谐振频率,所述DSP还包括数字陷波器,所述数字陷波器设置在方位轴和俯仰轴的速度环控制器输出端。
进一步地,所述DC/DC用于将外部28V电源转换为5V和±15V,提供给方位轴伺服单元和俯仰轴伺服单元供电;其中,5V给DSP、FPGA、AD及方位编码器和俯仰编码器读数头供电,±15V给电流采集电路供电;
外部28V还作为方位电机和俯仰电机的母线电压;
所述5V通过LDO产生DSP和FPGA运行所需的3.3V、2.5V、1.8V及1.2V电压,可有效减小系统功耗。
进一步地,所述电流采集电路包括电流取样电路、差分放大电路及低通滤波电路;所述电流取样电路采用电阻取样。
进一步地,为了减小故障成本,所述方位轴控制组件和俯仰轴控制组件还包括过流保护电路,所述±15V给过流保护电路供电;
所述过流保护电路的输入端与电流采集电路连接,电流采集电路还用于采集三相桥的母线电压,过流保护电路用于对母线电压进行过流判断;
所述过流保护电路输出端与PWM驱动电路相连;所述过流保护电路输出的过流信号与DSP输出的PWM脉冲信号在PWM驱动电路中进行逻辑与运算,过流时,过流信号置为低电平,禁止PWM脉冲信号转换为PWM驱动信号,从而使三相桥不工作。
进一步地,所述通讯电路采用RS422通信,选用AM26LV31和AM26LV32实现多路差分信号的发送和接收。
进一步地,所述数字陷波器为陷波频率56Hz的二阶数字滤波器,可以很好地滤除系统的机械谐振频率。
进一步地,所述AD转换电路采用16位AD,保证了系统的控制精度。
进一步地,所述三相桥采用六个N沟道MOSFET组成,MOSFET开通和关断时间短,保证了PWM的控制频率。
进一步地,所述方位电机和俯仰电机为永磁同步电机PMSM、直流无刷电机BLDC或直流电机DC。
本发明的有益效果是:
1)本发明稳定平台伺服控制系统基于SVPWM技术结合多传感器反馈信息,通过位 置-速度-电流三闭环系统实现机载稳定平台高精度控制,采用光纤陀螺和POS系统(航空定 位定向系统)作为速度和位置传感器,并针对系统机械谐振问题设计数字陷波器进行抑制, 实现了以DSP+FPGA为控制核心的稳定平台伺服控制系统的硬件与软件设计;系统具有响应 速度快,稳态精度高等优点,横滚/俯仰转台位置的稳定精度可达到
2)本发明采用速度环控制器+数字陷波器的形式来抑制机械谐振,解决了稳定平台在带载后,惯量发生变化,在不降低控制带宽情况下难以对固有的机械谐振进行抑制的问题。
3)本发明的速度环控制器采用光纤陀螺提取速度信息,解决了传统机载光电稳定平台控制系统采用压电陀螺存在着游走噪声大,信号噪声水平和带宽受加速度信号影响等缺点,提高了控制精度。
4)本发明采用永磁同步电机作为机载稳定平台的执行机构,解决了传统稳定平台采用直流无刷电机、直流电机存在的力矩输出波动、可靠性低等问题,实现更高的速度平稳性。
5)本发明的电流环控制器采用SVPWM调制,SVPWM在输出电压或电机线圈绕组中的电流具有更低的高次谐波和更高的电压利用率等优点。
6)本发明的三相桥选用的MOSFET开通和关断时间短,保证了PWM的控制频率;AD转换电路选用的AD采样分辨率为16位,保证了控制精度。
7)本发明采用过流保护电路实现过流保护功能,防止电机驱动侧电路过流;过流保护电路采用硬件判断来关断PWM输出,响应速度快,可靠性高。
8)本发明采用多集成、小型化设计将传统稳定平台伺服控制系统的伺服控制模块的二次电源、伺服控制器、主控电路板等多电路板集成的方式改变为由一个伺服控制板来完成,具有体积小、重量轻、成本低等优点。
附图说明
图1为本发明稳定平台伺服控制系统中,方位轴控制组件和俯仰轴控制组件的电路组成示意图;
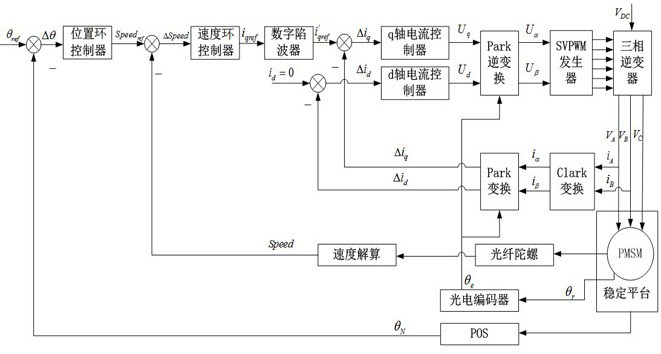
图2为本发明稳定平台伺服控制系统中,方位轴或俯仰轴的伺服控制原理示意图;
图3为本发明实施例中三相桥的电路示意图;
图4为本发明实施例中相电流采集电路的工作原理框图;
图5为本发明实施例中过流保护电路的工作原理框;
图6为本发明实施例中通信电路的差分信号的发送和接收电路示意图;
图7为本发明实施例中SVPWM调制技术电压空间矢量线性组合示意图;
图8为本发明实施例中SVPWM调制技术基本电压空间矢量示意图;
图9为本发明实施例中七段式SVPWM波形图;
图10为本发明实施例中数字陷波器的二阶滤波器频谱特性图;
图11为本发明实施例中控制程序流程框图;
图12为本发明实施例中横滚电机q轴电流给定与反馈波形图;
图13为本发明实施例中方位转台稳定精度测试数据统计图;
图14为本发明实施例中俯仰转台稳定精度测试数据统计图。
具体实施方式
为了更清楚地说明本发明的技术方案,下面结合附图和具体实施例对本发明进行详细说明。
本发明稳定平台伺服控制系统包括:包括DC/DC、方位轴伺服单元和俯仰轴伺服单元;方位轴伺服单元包括设置在方位轴上的方位电机、方位光纤陀螺、设置在方位电机输出轴上的方位编码器以及方位轴控制组件;俯仰轴伺服单元包括设置在俯仰轴上的俯仰电机、俯仰光纤陀螺、设置在俯仰电机输出轴上的俯仰编码器以及俯仰轴控制组件。其中,电机为永磁同步电机,编码器为光电编码器。
由于永磁同步电机(permanent magnet synchronous motor,PMSM)相比于直流无 刷电机、直流电机等能够提供可靠、稳定的力矩输出,由其驱动的转台可以实现更高的速度 平稳性。通过矢量控制,可实现对PMSM定子电流进行灵活性的控制。永磁同步电机矢量控制 的基本形式是将空间向量形式的三相电机模型简化成一个类似直流电机的模型,通过坐标 变换,完成对定子电流矢量的转换和分解,实现对磁通和转矩进行单独控制。针对永磁同步 电机的不同应用场合和控制要求,可采用多种矢量控制方法。当前最常用的控制策略有:
本发明控制系统电路包括DC/DC及方位轴控制组件和俯仰轴控制组件,方位轴控制组件和俯仰轴控制组件的电路结构完全相同,可采用一块电路板实现,也可采用单独的电路板实现。电路组成与原理如图1所示,外部供电28V通过DC/DC将电压转换为5V和±15V,其中28V作为控制电机的母线电压,5V用来给DSP、FPGA、AD、编码器读数头等供电,±15V用来提供给过流保护电路和相电流采样电路;DSP用来实现SVPWM控制算法以及电流、速度、位置三闭环控制算法实现;FPGA用来实现四路相电流采集、两路角度采集、两路速度采集,以及8路RS422通信;此外还通过硬件电路实现过流保护。
本发明稳定平台伺服控制系统结构原理如图2所示,控制框图以单轴控制为例,基于SVPWM技术结合多传感器反馈信息,设计了位置-速度-电流三闭环系统来实现机载稳定平台高精度控制。
其中位置环采用POS系统反馈位置信息进行控制,由于陀螺是机载光电稳定平台控制系统的关键元件,而压电陀螺本身存在着游走噪声大,信号噪声水平和带宽受加速度信号影响等缺点,因而本发明采用光纤陀螺进行速度反馈。速度环控制器采用光纤陀螺提取速度信息,进行速度闭环控制,以提高其控制精度。并且由于稳定平台带载后,惯量发生变化,系统自身存在固有的机械谐振问题,在速度环控制器的输出位置设计了数字陷波器对其进行抑制。
采用编码器对电机机械位置进行测量,其测量值转化为电角度用于电流环SVPWM 调制。图2所示的稳定平台控制系统为基于永磁同步电机矢量控制,在
1)电压空间矢量脉宽调制技术
在PMSM伺服控制系统中,常用的有正弦脉宽调制(SPWM)和电压空间矢量脉宽调制(SVPWM)。SPWM技术旨在产生可调频调幅的正弦供电电源。SVPWM技术则是将逆变器和PMSM视作一体,在提供可调频调幅正弦供电电源的同时,又能保证电机产生圆形旋转磁场。并且,与SPWM技术相比,SVPWM技术在输出电压或电机线圈绕组中的电流具有更低的高次谐波和更高的电压利用率等优点,所以本发明选用SVPWM调制技术。
2)数字陷波器抑制机械谐振
通过对系统进行带宽扫频测试,发现该稳定平台系统存在56Hz的机械谐振频率,使得系统在该频率附近产生谐振,稳定精度无法提升,所以本发明在速度环控制器的末端加入频率为56Hz的二阶数字陷波器对其谐振进行抑制。
实施例:
1)控制系统电路组成
本发明稳定平台伺服控制系统中,方位轴控制组件和俯仰轴控制组件采用一块电路板实现,电路板主要包含以下功能模块:DC/DC、DSP、FPGA、三相桥、PWM驱动电路、电流采集电路、过流保护电路、AD转换电路、RS422通信电路等。
①供电
该电路额定输入电压为28V,允许的输入电压范围为18~75V,该输入电压作为电机母线电压。同时该输入电压经DC/DC变换后为电路板供电。
选用了DATEL公司的三路输出DC/DC,可以同时输出5V、+15V、-15V三种电压。并且体积小、功率大。尺寸只有50.8mm×50.8mm×11.4mm,功率20W。
选用TI公司的TPS系列LDO产生DSP和FPGA运行所需的3.3V、2.5V、1.8V、1.2V电压。
②三相桥
三相桥是电机驱动的核心电路,该电路搭载了两个三相桥,可以同时驱动方位电机、俯仰电机。三相桥将DSP输出的PWM脉冲进行功率放大,实现方位电机、俯仰电机驱动控制。三相桥电路如图3所示,每个三相桥采用六个N沟道MOSFET组成。
选用的MOSFET开通和关断时间短,保证了PWM的控制频率。
最大驱动能力:75V,30A;
总开通关断时间:451ns。
③相电流采集
相电流采集由电流采集电路完成,电流采集电路包括电流取样电路、差分放大电路和低通滤波电路,其工作原理框图如图4所示,相电流经过取样电阻取样、差分放大电路放大、低通滤波后送入AD转换电路,转换为数字信号后,最终由FPGA完成相电流采样。采集后的相电流电流在DSP中完成坐标变换后参与电流的闭环控制。采集精度影响电机的电流控制精度。
AD转换电路选用的AD采样分辨率为16位。
④过流保护
为防止电机驱动侧电路过流,电路设计了过流保护电路实现过流保护功能,采用硬件判断来关断PWM输出。由于不需要软件判断,因此响应速度快,可靠性高。
过流保护电路主要包括过流判断电路,其工作原理框图如图5所示,电流采集电路采集三相桥的母线电压,经过差分放大、低通滤波后,送入过流保护电路与设定值进行过流判断,过流保护电路输出过流信号;DSP输出的PWM脉冲信号与过流信号完成逻辑与运算。过流时,过流信号置低从而禁止了PWM输出至三相桥,从而过流时PWM脉冲完全被禁止输出,三相桥也无法输出功率电流至电机。该功能完全由硬件电路实现,不需要软件参与。
⑤通信方式
通信采用RS422实现,如图6所示,选用AM26LV31和AM26LV32实现差分信号的发送和接收。该电路提供了输入、输出电路各8路。
2)电压空间矢量脉宽调制技术
本实发明选用SVPWM调制技术。图7为三相桥的八种开关状态对应的八个电压矢 量,其中三相桥处于U
在图8所示的平面内,根据矢量合成原理由划分某区域的两个基本电压空间矢量通过不同的线性组合的方式,得到在该区域内任何一个输出电压矢量U
图8中,U
式中:
按照上述方法,在每一个
由图8通过三角形正弦定理可得:
式中,
将公式(2)中
式中,
由
在SVPWM调制模式下,三相桥能够输出的最大不失真圆形旋转电压矢量幅值为
在对时间t
当三相桥单独输出零矢量U
通常以开关损耗小、谐波分量低为原则,在减少开关次数的同时,尽量使PWM脉冲信号的输出波形对称,减少谐波分量。目前在控制基本电压矢量和零矢量作用顺序上,常用的是七段式PWM控制。它由三段零矢量和四段相邻的两个有效空间矢量组成,七段式PWM的头尾和中间为零矢量,有效矢量对称插入到零矢量中。如图9所示,七段式SVPWM波形如有三个作用矢量切换点T
得到不同扇区的矢量切换点
3)数字陷波器抑制机械谐振
本实施例在速度环控制器的末端加入频率为56Hz的二阶数字陷波器对其谐振进行抑制,如公式(5)和公式(6)所示:
式中,
二阶滤波器频谱特性如图10所示,在陷波器的作用下伺服系统的控制参数可以调节到最优状态。
4)本发明稳定平台伺服控制系统控制程序流程框图如图11所示,其中,位置环控制器采用PID调节,速度环控制器采用PI调节,d、q轴电流控制器采用PI调节。
5)实验测试
永磁同步电机相比于其他电机控制的主要区别就是电流环的控制,也是最难实现的环节。电流环设计的好坏直接影响了整个控制系统的性能,在搭建好系统后重点对电流环的动静态性能进行了测试。
①扫频带宽测试
对横滚电机电流环输入±0.1A的正弦信号,频率为1~1000Hz,并以10kHz频率进行采集,测得横滚电流环带宽为:416Hz,俯仰电流环带宽为:460Hz,如图12所示,为横滚电机电流环反馈电流衰减为0.07A时的波形。
通过以上测试表明,本系统设计的电流环响应快速、精确,具有很好的动态和静态性能,为系统实现良好的调速性能奠定了基础。
②稳定精度测试
根据方案稳定精度需求,摇摆台横滚方向做幅值8.5度,频率0.3Hz的正弦摇摆,俯仰方向做幅值5.0度,频率0.3Hz的正弦摇摆,其方位/俯仰转台稳定精度测试数据如图13、图14所示。
本发明稳定平台伺服控制系统是基于SVPWM技术的永磁同步电机(PMSM)位置-速 度-电流三闭环控制系统,针对系统机械谐振问题设计数字陷波器进行抑制,实现了以DSP+ FPGA为控制核心的稳定平台伺服控制系统。通过搭建双轴电机的矢量控制系统实验平台, 在摇摆台的作用下进行模拟调试,最终横滚/俯仰转台位置的稳定精度达到
在其他实施例中,SVPWM调制策略还可以改为其他调制方式,例如:SPWM等;本发明采用永磁同步电机PMSM,也可置换为直流无刷电机BLDC,直流电机DC等转矩波动大的电机作为执行机构;此外,速度环控制器加数字陷波器的控制方式也可改变为位置环控制器加数字陷波器的控制方式来进行控制。
本发明稳定平台伺服控制系统主要应用在机载方面,也可应用于例如地基和天基观测领域的成像系统的搭载转台等设备上。
以上仅是对本发明的优选实施方式进行了描述,并非对本发明技术方案的限制,本领域技术人员在本发明主要技术构思的基础上所作的任何公知变形都属于本发明所要保护的技术范畴。
- 一种稳定平台伺服控制系统
- 一种应用于小型化高精度双轴天线平台的伺服控制系统