弹性球座的设计方法
文献发布时间:2023-06-19 11:52:33
技术领域
本发明涉及油田生产技术领域,具体而言,涉及一种弹性球座的设计方法。
背景技术
为了提高固井滑套无限级分压作业的效率,降低作业成本。技术人员希望不借助诸如连续油管车等地面配套设备,仅仅通过在井口投入相应工具就能完成滑套打开的操作。目前此类相关技术有以下几类:
有限级投球式固井滑套分压,该技术可以通过从井口逐级投一定级差的压裂球依次打开井下滑套的方式进行压裂。
无限级投球固井滑套分压,该技术的滑套内部有计数装置,可以允许通过设定数量且尺寸相同的压裂球,实现了投球无限级压裂的功能。
投镖式无限级固井滑套分压,该技术可以通过从井口投相同尺寸飞镖的方式逐级打开井下滑套进行压裂。
还有一种是使用具有弹性、在外力作用下可收缩的弹性球座逐级打开井下滑套进行压裂,但该弹性球座的结构往往不易与井下滑套相匹配,影响滑套打开准确度。
发明内容
本发明提供一种弹性球座的设计方法,以解决现有技术中的弹性球座结构不合理、影响滑套打开准确度的问题。
本发明提供了一种弹性球座的设计方法,弹性球座的设计方法包括:
获取弹性球座的初定参数值,初定参数值包括基本参数组、第一参数组、第二参数组和第三参数组;
根据实际强度和材料强度之间的关系,确定第一参数组的目标值;
根据弹性球座通过滑套的通过条件,确定第二参数组的目标值;
根据弹性球座卡接滑套的定位条件,确定第三参数组的目标值;
其中,基本参数组包括D、d、a、μ、E以及P,D为球座台阶最大外径,d为球座本体最大外径,a为有效悬臂长度,μ为摩擦系数,E为材料弹性模量,P为液体压强;
第一参数组包括b、h、n,b为弹性爪本体的宽度,h为弹性爪本体壁厚,n为弹性爪数量;
第二参数组包括α
第三参数组包括α
进一步地,根据实际强度和材料强度之间的关系,确定第一参数组的目标值,具体包括:
根据第一参数组获取实际应力值;
判断第一参数组获取的实际应力值是否满足:
σ1<[σ] 公式1;
若不满足则对第一参数组内参数进行调整以使其满足公式1,其中,σ1为实际应力值,[σ]为材料许用应力。
进一步地,根据弹性球座通过滑套的通过条件,确定第二参数组的目标值,具体包括:
判断初定参数值是否满足:
若不满足则对第二参数组内参数进行调整,以使初定参数值满足公式2。
进一步地,根据弹性球座卡接滑套的定位条件,确定第三参数组的目标值,具体包括:
判断初定参数值是否满足:
若不满足则对第三参数组内参数进行调整,以使初定参数值满足公式3。
进一步地,初定参数值还包括第四参数组,在根据弹性球座卡接滑套的定位条件,确定第三参数组的目标值之后,设计方法还包括:
根据弹性球座匹配滑套的识别条件,确定第四参数组的目标值;
其中,第一参数组的参数与第四参数组的参数相同。
进一步地,根据弹性球座匹配滑套的识别条件,确定第四参数组的目标值,具体包括:
根据第四参数组获取S,S为弹性球座与滑套实际接触面积;
判断初定参数值以及S是否满足:
若不满足则对第四参数组内参数进行调整,以使初定参数值满足公式4。
应用本发明的技术方案,在设计弹性球座参数时,先初定参数值,然后通过实际强度和材料强度之间的关系,确定第一参数组的目标值;根据弹性球座通过滑套的通过条件,确定第二参数组的目标值,根据弹性球座卡接滑套的定位条件,确定第三参数组的目标值。通过该设计方法获取的参数值,能够使弹性球座的强度满足使用要求,并使弹性球座能够直接通过与其不匹配的滑套,在落入相应滑套的台阶位置时与该台阶卡接。这样能够提高弹性球座尺寸设计准确性,确保弹性球座尺寸与滑套台阶尺寸相匹配,提高滑套打开准确度。
附图说明
构成本申请的一部分的说明书附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:
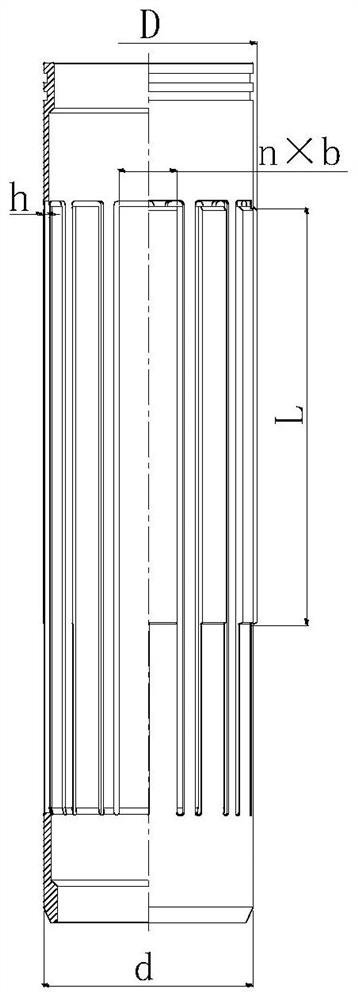
图1示出了根据本发明实施例提供的弹性球座的结构示意图;
图2示出了弹性球座经过滑套台阶的受力分析图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。以下对至少一个示例性实施例的描述实际上仅仅是说明性的,决不作为对本发明及其应用或使用的任何限制。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
如图1和图2所示,本发明实施例提供了一种弹性球座的设计方法,该弹性球座的设计方法包括:
步骤1、获取弹性球座的初定参数值,初定参数值包括基本参数组、第一参数组、第二参数组和第三参数组;
步骤2、根据实际强度和材料强度之间的关系,确定第一参数组的目标值;
步骤3、根据弹性球座通过滑套的通过条件,确定第二参数组的目标值;
步骤4、根据弹性球座卡接滑套的定位条件,确定第三参数组的目标值;
其中,弹性球座是通过在金属筒上开槽来实现弹性变形的,其力学模型是一种悬臂梁,因此可参考悬臂梁来设计、确定弹性球座的尺寸。其中,在图2中,Fx为弹性球座受到的轴向载荷,f为弹性球座在通过滑套台阶时受到的摩擦力,N为滑套台阶与弹性球座接触面的正压力,α为滑套内径变动处形成的台阶角度。基本参数组包括D、d、a、μ、E以及P,D为球座台阶最大外径,d为球座本体最大外径,a为有效悬臂长度,μ为摩擦系数,E为材料弹性模量,P为液体压强;
第一参数组包括b、h、n,b为弹性爪本体的宽度,h为弹性爪本体壁厚,n为弹性爪数量;
第二参数组包括α
第三参数组包括α
通过本实施例提供的技术方案,在设计弹性球座参数时,先初定参数值,然后通过实际强度和材料强度之间的关系,确定第一参数组的目标值。根据弹性球座通过滑套的通过条件,确定第二参数组的目标值,以使弹性球座能够通过与其不匹配的滑套台阶。根据弹性球座卡接滑套的定位条件,确定第三参数组的目标值,以使弹性球座在落入与其匹配的滑套台阶时,与该台阶卡接。通过该设计方法获取的参数值,能够使弹性球座的强度满足使用要求,并使弹性球座能够直接通过与其不匹配的滑套台阶,在落入相应滑套台阶位置时与台阶卡接。这样能够提高弹性球座尺寸设计准确性,确保弹性球座尺寸与滑套内台阶尺寸相匹配,提高滑套打开效率。
具体的,在执行步骤2时,根据实际强度和材料强度之间的关系,确定第一参数组的目标值,具体包括:
根据第一参数组获取实际应力值,该实际应力值可根据现有公式计算获得,也可通过软件计算获得。
判断第一参数组获取的实际应力值是否满足:
σ1<[σ] 公式1;
若第一参数组不满足上述公式1,则对第一参数组数值进行调整。具体的,可采用将b值增大和/或h值减小和/或n值减小的方式进行调整。若满足公式1则不用调整。其中,σ1为实际应力值,[σ]为材料许用应力。
具体的,在执行步骤3时,根据弹性球座通过滑套的通过条件,确定第二参数组的目标值,具体包括:
判断初定参数值是否满足:
若不满足则对第二参数组内参数进行调整,以使初定参数值满足公式2。具体的,可采用减小α
具体的,在执行步骤4时,根据弹性球座卡接滑套的定位条件,确定第三参数组的目标值,具体包括:
判断初定参数值是否满足:
若不满足则对第三参数组内参数进行调整,以使初定参数值满足公式3。具体的,可采用增大α
在本实施例中,初定参数值还包括第四参数组,在根据弹性球座卡接滑套的定位条件,确定第三参数组的目标值之后,该设计方法还包括:
步骤5,根据弹性球座匹配滑套的识别条件,确定第四参数组的目标值;
其中,第一参数组的参数与第四参数组的参数相同。具体的,该识别条件可以将弹性球座落入与其相匹配的滑套的台阶处,即在向套管内放入弹性球座后,只有该滑套的台阶能够将弹性球座卡入,弹性球座在落入该滑套台阶之前的其它滑套台阶均会通过,即使有能卡接的台阶也会因为弹性球座的变形而继续下落,直到落入与之对应的滑套台阶内。通过该步骤能够避免弹性球座卡入不与其匹配的滑套台阶内,进一步提高弹性球座与滑套台阶匹配的准确性。
具体的,在执行步骤5时,根据弹性球座匹配滑套的识别条件,确定第四参数组的目标值,具体包括:
根据第四参数组获取S,S为弹性球座与滑套实际接触面积;
判断初定参数值以及S是否满足:
若不满足则对第四参数组内参数进行调整,以使初定参数值满足公式4。
在采用本实施例提供的设计方法时,可以按照步骤1至5的顺序执行,也可在执行步骤1后打乱其余执行顺序。在本实施例中,采用步骤1、步骤2、步骤3、步骤4、步骤5的顺序执行,且在执行步骤3、步骤4和步骤5中任一步骤时,若对参数进行了调整,则返回步骤2。若没有调整,则按该顺序步骤继续执行。通过该步骤可以减少调整次数,提高调整效率。
根据上述设计方法,结合下面实施例进行具体说明,具体操作如下:
步骤1,初设以下参数值:
n=12,L
a=87mm,α
P在强度条件下为50MPa,在通过条件下为3MPa,在定位条件下为50MPa,在识别条件下为10MPa。
步骤2,利用悬臂梁模型,并带入上述参数值计算实际强度值为815.04MPa,其小于许用应力值835MPa,因此第一参数组满足要求。
将上述参数值带入步骤3的计算公式中,公式左侧数值为131300.4N,公式右侧数值为176616.5N,因此第二参数组满足要求。
将上述参数值带入步骤4的计算公式中,公式左侧数值为376299.6N,公式右侧数值为127366.8N,因此第三参数组满足要求。
将上述参数值带入步骤5的计算公式中,通过分析并结合计算公式可得出第四参数组满足要求。
通过以上计算结果可以认为,所选参数值在给定工况载荷下,符合判断条件,所选参数合适。按照该尺寸进行制造后,可将弹性球座进行测试,其测试结果显示,该弹性球座能够卡入预定滑套的台阶中,并能够承受预设载荷,其符合使用条件要求。
通过本实施例提供的设计方法,实现了弹性球座的变形、收缩并且能与目标结构准确识别和可靠定位。
需要注意的是,这里所使用的术语仅是为了描述具体实施方式,而非意图限制根据本申请的示例性实施方式。如在这里所使用的,除非上下文另外明确指出,否则单数形式也意图包括复数形式,此外,还应当理解的是,当在本说明书中使用术语“包含”和/或“包括”时,其指明存在特征、步骤、操作、器件、组件和/或它们的组合。
除非另外具体说明,否则在这些实施例中阐述的部件和步骤的相对布置、数字表达式和数值不限制本发明的范围。同时,应当明白,为了便于描述,附图中所示出的各个部分的尺寸并不是按照实际的比例关系绘制的。对于相关领域普通技术人员已知的技术、方法和设备可能不作详细讨论,但在适当情况下,所述技术、方法和设备应当被视为授权说明书的一部分。在这里示出和讨论的所有示例中,任何具体值应被解释为仅仅是示例性的,而不是作为限制。因此,示例性实施例的其它示例可以具有不同的值。应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步讨论。
在本发明的描述中,需要理解的是,方位词如“前、后、上、下、左、右”、“横向、竖向、垂直、水平”和“顶、底”等所指示的方位或位置关系通常是基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,在未作相反说明的情况下,这些方位词并不指示和暗示所指的装置或元件必须具有特定的方位或者以特定的方位构造和操作,因此不能理解为对本发明保护范围的限制;方位词“内、外”是指相对于各部件本身的轮廓的内外。
为了便于描述,在这里可以使用空间相对术语,如“在……之上”、“在……上方”、“在……上表面”、“上面的”等,用来描述如在图中所示的一个器件或特征与其他器件或特征的空间位置关系。应当理解的是,空间相对术语旨在包含除了器件在图中所描述的方位之外的在使用或操作中的不同方位。例如,如果附图中的器件被倒置,则描述为“在其他器件或构造上方”或“在其他器件或构造之上”的器件之后将被定位为“在其他器件或构造下方”或“在其他器件或构造之下”。因而,示例性术语“在……上方”可以包括“在……上方”和“在……下方”两种方位。该器件也可以其他不同方式定位(旋转90度或处于其他方位),并且对这里所使用的空间相对描述作出相应解释。
此外,需要说明的是,使用“第一”、“第二”等词语来限定零部件,仅仅是为了便于对相应零部件进行区别,如没有另行声明,上述词语并没有特殊含义,因此不能理解为对本发明保护范围的限制。
以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 弹性球座的设计方法
- 一种弹性球座卷曲安装工装和使用方法