一种组装棱镜的装置以及生产设备
文献发布时间:2023-06-19 11:55:48
技术领域
本申请实施例涉及棱镜组装技术领域。
背景技术
棱镜是一种用透明材料做成的截面呈三角形的光学器件,在光学仪器中用来把复合光分解成光谱或用来改变光线的方向,也叫三棱镜。棱镜在使用中,往往需要装配到装配主体上,从而一方面维持棱镜的稳定行,从而保障棱镜的精确度,另一方面,通过将棱镜组装在装配主体上,则可有效避免棱镜收到外部物体的摩擦或者碰撞等,从而有效的保护棱镜功能的正常。
本申请的申请人在实现本申请的过程中,发现:目前,传统的将棱镜组装于装配主体的过程是通过人工进行的,人工组装的方式,其效率低且产品的不良率高。
发明内容
鉴于上述问题,本申请实施例提供了一种组装棱镜的装置以及生产设备,克服了上述问题或者至少部分地解决了上述问题。
根据本申请实施例的一个方面,提供了一种组装棱镜的装置,用于将棱镜组装至装配主体的安装槽,包括:第一工位,用于所述棱镜的放置;第二工位,用于所述装配主体的放置;机械手,用于抓取所述棱镜;第一机动单元,与所述机械手连接,用于驱动所述机械手上升或者下降;第二机动单元,与所述第一机动单元连接,用于驱动所述第一机动单元,使其可在所述第一工位和第二工位之间往复运动;夹持装置,用于设置于所述装配体的安装槽,所述夹持装置用于夹持所述棱镜;控制器,分别与所述机械手、第一机动单元和第二机动单元连接。
在一种可选的方式中,所述夹持装置包括承载件、第一弹性件、夹臂和第二弹性件;所述第一弹性件用于设置于所述安装槽的槽底,所述第一弹性件远离所述装配主体的一端与所述承载件连接,所述承载件远离第一弹性件的一端用于承载所述棱镜,所述承载件可相对于所述装配主体运动;所述第二弹性件用于设置于所述安装槽的槽壁,所述第二弹性件远离所述装配主体的一端与所述夹臂的一端连接,所述夹臂的另一端与所述承载件抵接,所述夹臂的还一端用于与所述棱镜抵接,所述夹臂可相对于所述装配主体运动;所述第一机动单元驱动所述机械手下降,所述机械手抓取的所述棱镜朝向所述承载件施加作用力,所述第一弹性件压缩,所述第二弹性件压缩,所述夹臂朝向远离所述承载件的方向移动,所述机械手释放所述棱镜,所述第一弹性件回弹,所述第二弹性件回弹,所述夹臂朝向靠近所述承载件的方向移动,所述棱镜被夹持于所述夹臂与所述安装槽之间。
在一种可选的方式中,所述承载件远离所述安装槽的槽底的一端到所述安装槽的槽底的距离,不小于所述夹臂的还一端到所述安装槽的槽底的距离。
在一种可选的方式中,所述第二弹性件的数量为三个,所述夹臂的数量为三个,三个所述第二弹性件分布于所述安装槽的槽壁,且,一所述第二弹性件远离所述装配主体的一端与一所述夹臂的一端连接。
在一种可选的方式中,所述夹臂的还一端朝向所述承载件弯折形成卡勾,所述棱镜承载于所述承载件时,所述卡勾用于与所述棱镜远离所述承载件的一端卡接。
在一种可选的方式中,还包括到位检测单元,所述到位检测单元设置于所述安装槽,所述到位检测单元与所述控制器连接,所述到位检测单元检测到所述承载件运动到预设位置时,所述控制器控制所述机械手释放所述机械手抓取的所述棱镜,以使所述卡勾抵接所述棱镜远离所述承载件的一端。
在一种可选的方式中,所述承载件设置第一斜面,所述第一斜面面向所述安装槽的槽底设置,所述夹臂的另一端设置第二斜面,所述第二斜面面向所述第一斜面设置,且所述第二斜面与所述第一斜面抵接。
在一种可选的方式中,所述夹持装置还包括缓冲件,所述缓冲件设置于所述夹臂的还一端,所述缓冲件用于与所述棱镜抵接。
在一种可选的方式中,所述机械手包括连接臂、真空发生器和真空吸盘;所述连接臂的一端与所述第一机动单元连接,所述机械臂的另一端与所述真空发生器连接,所述真空发生器还与所述真空吸盘连接;所述真空发生器还与所述控制器连接,所述控制器用于控制所述真空发生器工作,以使所述真空吸盘吸附所述棱镜。
根据本申请实施例的一个方面,提供了一种生产设备,包括上述组装棱镜的装置。
本申请实施例的有益效果是:提供了一种组装棱镜的装置和生成设备,组装棱镜的装置包括第一工位,用于所述棱镜的放置;第二工位,用于所述装配主体的放置;机械手,用于抓取所述棱镜;第一机动单元,与所述机械手连接,用于驱动所述机械手上升或者下降;第二机动单元,与所述第一机动单元连接,用于驱动所述第一机动单元,使其可在所述第一工位和第二工位之间往复运动;夹持装置,用于设置于所述装配体的安装槽,所述夹持装置用于夹持所述棱镜;控制器,分别与所述机械手、第一机动单元和第二机动单元连接。通过机械手将棱镜抓取,并在第一机动单元和第二机动单元的作用下,将棱镜移动至装配主体,以使棱镜被装配于夹持装置,从而实现机械手将棱镜组装于装配主体,从而不需要人工手动的进行组装,非常方便。
附图说明
一个或多个实施例通过与之对应的附图中的图片进行示例性说明,这些示例性说明并不构成对实施例的限定,附图中具有相同参考数字标号的元件表示为类似的元件,除非有特别申明,附图中的图不构成比例限制。
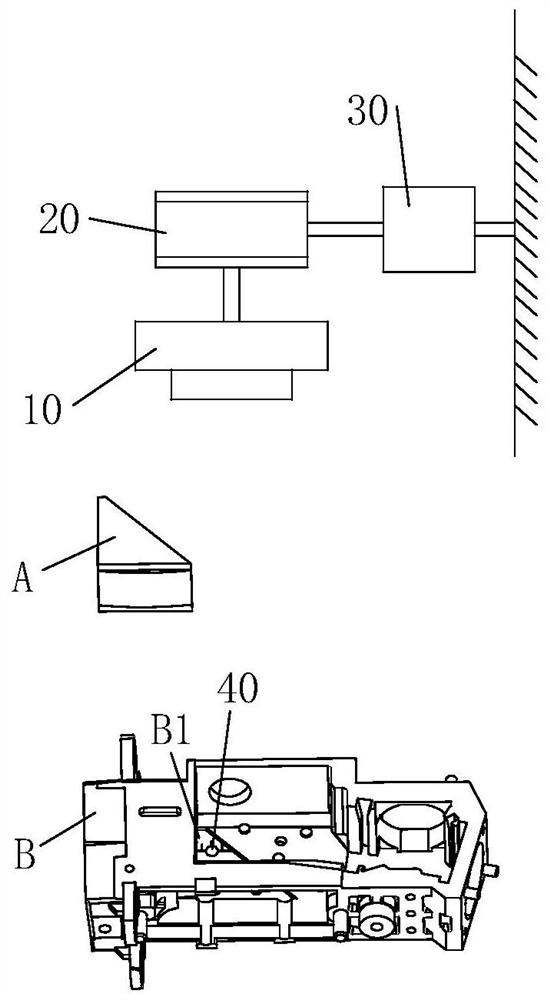
图1是本申请实施例提供的组装棱镜的装置应用于棱镜组装的示意图;
图2是本申请实施例提供的组装棱镜的装置各部件之间的连接关系的示意图;
图3是本申请实施例提供的棱镜组装于装配主体的示意图;
图4是本申请实施例提供的机械手、第一机动单元和第二机动单元的示意图;
图5是本申请实施例提供的夹持装置安装于安装槽的示意图。
具体实施方式
为了便于理解本申请,下面结合附图和具体实施例,对本申请进行更详细的说明。需要说明的是,当元件被表述“固定于”另一个元件,它可以直接在另一个元件上、或者其间可以存在一个或多个居中的元件。当一个元件被表述“连接”另一个元件,它可以是直接连接到另一个元件、或者其间可以存在一个或多个居中的元件。本说明书所使用的术语“垂直的”、“水平的”、“左”、“右”、“内”、“外”以及类似的表述只是为了说明的目的。
除非另有定义,本说明书所使用的所有的技术和科学术语与属于本申请的技术领域的技术人员通常理解的含义相同。在本申请的说明书中所使用的术语只是为了描述具体实施例的目的,不是用于限制本申请。本说明书所使用的术语“和/或”包括一个或多个相关的所列项目的任意的和所有的组合。
请参阅图1-图3,组装棱镜A的装置包括:第一工位(图未示)、第二工位(图未示)、机械手10、第一机动单元20、第二机动单元30、夹持装置40和控制器50。第一工位用于所述棱镜A的放置。第二工位用于所述装配主体B的放置。机械手10用于抓取所述棱镜A。第一机动单元20,与所述机械手10连接,用于驱动所述机械手10上升或者下降。第二机动单元30,与所述第一机动单元20连接,用于驱动所述第一机动单元20,使其可在所述第一工位和第二工位之间往复运动。夹持装置40,用于设置于所述装配体的安装槽B1,所述夹持装置40用于夹持所述棱镜A。控制器50,分别与所述机械手10、第一机动单元20和第二机动单元30连接。通过机械手10将棱镜A抓取,并在第一机动单元20和第二机动单元30的作用下,机械手10将棱镜A移动至装配主体B,机械手10释放所述棱镜A,所述棱镜A被装配于位于装配主体B的夹持装置40,从而实现机械手10将棱镜A组装于装配主体B,从而不需要人工手动的进行组装,非常方便。
对于上述第一工位和第二工位,第一工位用于所述棱镜A的放置,第二工位用于所述装配主体B的设置。在一些实施例中,所述第一工位和第二工位具有预设距离,即所述棱镜A与装配主体B上棱镜A需要安装的夹持装置40之间的距离是固定的,从而方便机械手10将棱镜A移动至装配主体B并使其夹持于夹持装置40。
对于上述机械手10,在一些实施例中,请参阅图4,机械手10包括连接臂101、真空发生器102和真空吸盘103。其中,所述连接臂101的一端与所述第一机动单元20连接,所述机械臂的另一端与所述真空发生器102连接,所述真空发生器102还与所述真空吸盘103连接。所述真空发生器102启动时,所述真空吸盘103可吸附所述棱镜A,所述真空发生器102关闭时,所述真空吸盘103可释放所述棱镜A。
需要说明的是,所述真空发生器102可以是一体成型的,也可以是分体设计的,只要能够实现对真空吸盘103进行控制,以使真空吸盘103吸附或者释放所述棱镜A即可。
需要说明的是,在一些实施例中,所述真空吸盘103为橡胶材质,从而真空吸盘103在吸附或者释放棱镜A时,不容易刮花棱镜A,从而可有效保障棱镜A的光学性能。
对于上述第一机动单元20,第一机动单元20与所述机械手10连接,用于驱动所述机械手10上升或者下降。其中,所述上升是指沿着第一方向远离所述第一工位,其中,所述第一方向与所述棱镜A远离所述第一工位的一表面垂直。其中,所述下降是指沿着第一方向靠近所述第一工位。
需要说明的是,在一些实施例中,第一机动单元20包括气缸。
对于上述第二机动单元30,第二机动单元30与所述第一机动单元20连接,用于驱动所述第一机动单元20,以使其可在所述第一工位和第二工位之间往复运动。所述第一机动单元20在所述第一工位和第二工位之间往复运动时,与所述第一机动单元20连接的机械手10,以及所述机械手10抓取的棱镜A,可在所述第一工位和第二工位之间往复运动。
需要说明的是,在一些实施例中,第二机动单元30包括气缸,通过合理的设置第一工位、第二工位以及第二机动单元30的位置,从而第二机动单元30包括气缸时,即可实现第二机动单元30的功能。
需要说明的是,在一些实施例中,第二机动单元30固定于墙面,或者,第二机动单元30还可以固定于地面,或者,第二机动单元30还可以固定于天花板。
对于上述夹持装置40,请参阅图1和图5,夹持装置40包括承载件401、第一弹性件402、夹臂403、第二弹性件404和缓冲件405。所述第一弹性件402用于设置于所述安装槽B1的槽底B11,所述第一弹性件402远离所述装配主体B的一端与所述承载件401连接,所述承载件401远离第一弹性件402的一端用于承载所述棱镜A,所述承载件401可相对于所述装配主体B运动。所述第二弹性件404用于设置于所述安装槽B1的槽壁B12,所述第二弹性件404远离所述装配主体B的一端与所述夹臂403的一端连接,所述夹臂403的另一端与所述承载件401抵接,所述夹臂403的还一端用于与所述棱镜A抵接,所述夹臂403可相对于所述装配主体B运动。通过设置夹持装置40,夹持装置40用于对棱镜A进行夹持,则棱镜A被组装于装配主体B时,棱镜A不容易相对于装配主体B晃动,从而可保障棱镜A的光学性能。
在本申请实施例中,所述第一机动单元20驱动所述机械手10下降,所述机械手10抓取的所述棱镜A朝向所述承载件401施加作用力,所述第一弹性件402压缩,所述第二弹性件404压缩,所述夹臂403朝向远离所述承载件401的方向移动,所述机械手10释放所述棱镜A,所述第一弹性件402回弹,所述第二弹性件404回弹,所述夹臂403朝向靠近所述承载件401的方向移动,所述棱镜A被夹持于所述夹臂403与所述安装槽B1之间。
需要说明的是,在一些实施例中,承载件401用于与所述棱镜A接触的一表面的尺寸与所述棱镜A具有预设比例,从而保障棱镜A朝向所述承载件401施加作用力时,棱镜A不容易破损。
需要说明的是,在一些实施例中,所述承载件401远离所述安装槽B1的槽底B11的一端到所述安装槽B1的槽底B11的距离,不小于所述夹臂403的还一端到所述安装槽B1的槽底B11的距离,从而便于棱镜A压迫承载件401。
需要说明的是,在一些实施例中,所述第二弹性件404的数量为三个,所述夹臂403的数量为三个,三个所述第二弹性件404分布于所述安装槽B1的槽壁B12,且,一所述第二弹性件404远离所述装配主体B的一端与一所述夹臂403的一端连接,从而三个所述夹臂403可实现对所述棱镜A的稳固夹持。
需要说明的是,在一些实施例中,所述夹臂403的还一端朝向所述承载件401弯折形成卡勾4031,所述棱镜A承载于所述承载件401时,所述卡勾4031用于与所述棱镜A远离所述承载件401的一端卡接,从而更进一步的使得夹持装置40稳固的夹持所述棱镜A。
需要说明的是,在一些实施例中,所述组装棱镜A的装置还包括到位检测单元60,所述到位检测单元60设置于所述安装槽B1,所述到位检测单元60与所述控制器50连接,所述到位检测单元60检测到所述承载件401运动到预设位置时,所述控制器50控制所述机械手10释放所述机械手10抓取的所述棱镜A,以使所述卡勾4031抵接所述棱镜A远离所述承载件401的一端。
其中,所述预设位置为,所述棱镜A压迫所述承载件401运动到所述预设位置时,所述棱镜A远离所述安装槽B1的槽底B11的一端到所述安装槽B1的槽底B11的距离,不大于所述卡勾4031朝向所述安装槽B1的槽底B11的一表面到所述安装槽B1的槽底B11的距离。
需要说明的是,在一些实施例中,所述到位检测单元60包括红外传感器。
优选的,所述到位检测单元60设置于所述安装槽B1的槽壁B12。
值得说明的是,在一些实施例中,所述承载件401设置第一斜面4011,所述第一斜面4011面向所述安装槽B1的槽底B11设置,所述夹臂403的另一端设置第二斜面4032,所述第二斜面4032面向所述第一斜面4011设置,且所述第二斜面4032与所述第一斜面4011抵接。
可以理解的是,夹臂403的数量为三个时,所述第二斜面4032的数量为三个,则所述第一斜面4011的数量为三个,且一个所述第二斜面4032与一个所述第一斜面4011抵接。
需要说明的是,在一些实施例中,缓冲件405为橡胶材质。
值得说明的是,也可不设置所述缓冲件405,则也实现夹持装置40夹持所述棱镜A的功能,当然,设置缓冲件405,缓冲件405位于夹臂403的还一端与所述棱镜A之间,从而一方面,增加夹臂403与棱镜A之间的摩擦力,夹持装置40对棱镜A的夹持稳固,另一方面,缓冲件405可对棱镜A进行有效的防护,棱镜A不容易被夹臂403刮花,从而可有效的保护棱镜A的光学性能。
对于上述控制器50,请参阅图2,控制器50分别与所述机械手10、第一机动单元20和第二机动单元30连接。其中,机械手10包括机械臂、真空发生器102和真空吸盘103时,控制器50具体的与所述真空发生器102连接。所述控制器50与所述真空发生器102连接时,控制器50用于控制所述真空发生器102工作,以使所述真空吸盘103吸附所述棱镜A,以及用于控制所述真空发生器102关闭,以使所述真空吸盘103释放器所吸附的所述棱镜A。所述控制器50还用于控制所述第一机动单元20驱动所述机械手10上升或者下降。所述控制器50还用于控制所述第二机动单元30驱动所述第一机动单元20,使其可在所述第一工位和第二工位之间作往复运动。
值得说明的是,所述控制器50所涉及的程序步骤是采用现有程序步骤,控制器50也是采用现有的处理器,例如:英特尔的I3处理器、AMD锐龙处理器等等。
在本申请实施例中,机械手10将棱镜A组装于装配主体B的一种方式为,控制器50控制机械手10抓取位于所述第一工位的所述棱镜A,所述第一机动单元20驱动所述机械手10上升,所述第二机动单元30驱动所述第一机动单元20将所述机械手10上抓取的所述棱镜A移动至所述第二工位,具体的,将所述棱镜A移动至所述第二工位上放置的装配主体B上设置的夹持装置40的上方,所述第一机动单元20驱动所述机械手10上抓取的所述棱镜A下降,所述棱镜A朝向所述承载件401施加作用力,所述第一弹性件402压缩,所述第二弹性件404压缩,三个所述夹臂403分别朝向远离所述承载件401的方向移动,所述到位监测单元检测到所述承载件401运动到预设位置,所述控制器50控制所述机械手10释放所述机械手10抓取的所述棱镜A,所述第一弹性件402回弹,所述第二弹性件404回弹,三个所述夹臂403分别朝向靠近所述承载件401的方向移动,所述棱镜A被夹持于三个所述夹臂403之间,所述夹臂403朝向所述承载件401弯折形成有卡勾4031时,所述棱镜A被夹持于三个所述夹臂403,以及三个所述夹臂403弯折形成的三个所述卡勾4031之间。
在本申请实施例中,组装棱镜A的装置包括第一工位,用于所述棱镜A的放置;第二工位,用于所述装配主体B的放置;机械手10,用于抓取所述棱镜A;第一机动单元20,与所述机械手10连接,用于驱动所述机械手10上升或者下降;第二机动单元30,与所述第一机动单元20连接,用于驱动所述第一机动单元20,使其可在所述第一工位和第二工位之间往复运动;夹持装置40,用于设置于所述装配体的安装槽B1,所述夹持装置40用于夹持所述棱镜A;控制器50,分别与所述机械手10、第一机动单元20和第二机动单元30连接。通过机械手10将棱镜A抓取,并在第一机动单元20和第二机动单元30的作用下,机械手10将棱镜A移动至装配主体B,机械手10释放所述棱镜A,所述棱镜A被装配于位于装配主体B的夹持装置40,从而实现机械手10将棱镜A组装于装配主体B,从而不需要人工手动的进行棱镜A的组装,非常方便。
本申请实施例还提供了一种生产设备的实施例,生产设备包括所述组装棱镜A的装置。对于组装棱镜A的装置的具体结构和功能可参阅上述实施例,此处不再一一赘述。
需要说明的是,本申请的说明书及其附图中给出了本申请的较佳的实施例,但是,本申请可以通过许多不同的形式来实现,并不限于本说明书所描述的实施例,这些实施例不作为对本申请内容的额外限制,提供这些实施例的目的是使对本申请的公开内容的理解更加透彻全面。并且,上述各技术特征继续相互组合,形成未在上面列举的各种实施例,均视为本申请说明书记载的范围;进一步地,对本领域普通技术人员来说,可以根据上述说明加以改进或变换,而所有这些改进和变换都应属于本申请所附权利要求的保护范围。
- 一种组装棱镜的装置以及生产设备
- 一种基于合色且消偏振分光棱镜模组装置