一种微小型两自由度超声电机及其驱动方法
文献发布时间:2023-06-19 12:02:28
技术领域
本发明涉及微特电机技术领域,特别涉及一种微小型两自由度超声电机及其驱动方法,该超声电机结构简单、尺寸小,输出力大、且驱动方法简单,适用于微小空间内物体的精密定位以及驱动。
背景技术
超声电机因具有低速大转矩、噪声小、响应快、不受电磁干扰等特点,在航空航天工程、光学工程、精密仪器等领域得到了广泛的应用,对于微型化超声电机来说,压电陶瓷薄片具有设计灵活的优点,常用作微型超声电机的驱动源,然而压电陶瓷薄片基于机电耦合效率低的d31模式工作,输出能力受限;且目前的超声电机大多是基于超声激发弹性体共振而实现相应驱动的,这种方式结构设计复杂、且运动不稳定;这些问题限制了微型超声电机的实际应用发展。
发明内容
本发明的目的在于提供一种微小型两自由度超声电机及其驱动方法,利用压电叠堆作为驱动源,在保证了结构微型化的基础上,具有更优异、稳定的输出能力,具有两自由度输出的能力,能够满足微小空间内对于物体的平面精密定位。
本发明的上述目的通过以下技术方案实现:
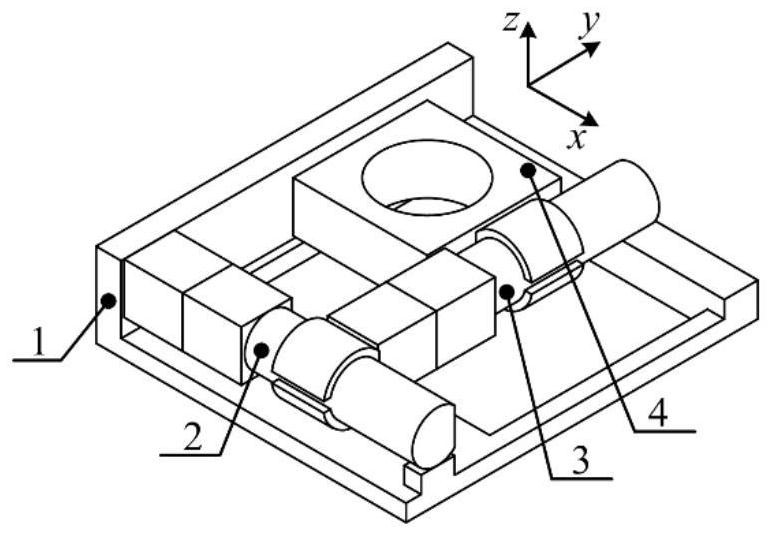
一种微小型两自由度超声电机,其特征在于:由基座1、x轴运动单元2、y轴运动单元3和载物台4组成;所述的x轴运动单元2通过压电叠堆a2-1固定连接在基座1上;所述的y轴运动单元3通过压电叠堆c3-1固定连接在x轴运动单元2的从动件a2-4上;所述的载物台4固定连接在y轴运动单元3的从动件b3-4上;所述的载物台4可以做成外部矩形、内部中空环形的结构,以搭载微型摄像头,并将一种微小型两自由度超声电机集合到手机、无人机等设备中,可以实现摄像防抖功能。
所述的基座1由凸台a1-1、中空腔体1-2、凸台b1-3组成,凸台a1-1和凸台b1-3的作用是承载x轴运动单元2和y轴运动单元3;中空腔体的作用是适应更多不同类型的被驱目标物体。
所述的x轴运动单元2由压电叠堆a2-1、压电叠堆b2-2、连接杆a2-3、从动件a2-4组成,所述的压电叠堆b2-2粘结在压电叠堆a2-1上,所述的连接杆a2-3粘结在压电叠堆b2-2上,所述的从动件a2-4以自适应预紧的方式安装在连接杆a2-3上。
所述的y轴运动单元3由压电叠堆c3-1、压电叠堆d3-2、连接杆b3-3、从动件b3-4组成,所述的压电叠堆d3-2粘结在压电叠堆c3-1上,所述的连接杆b3-3粘结在压电叠堆d3-2上,所述的从动件b3-4以自适应预紧的方式安装在连接杆b3-3上。
本发明的另一目的在于提供一种微小型两自由度超声电机的驱动方法,主要包括以下步骤:
a)给x轴运动单元2的压电叠堆a2-1施加
b)通过控制压电叠堆a2-1和压电叠堆b2-2的激励信号的幅值A、B和相位
本发明的有益效果在于:通过本发明提供的一种微小型两自由度超声电机及其驱动方法,可以实现对目标物体的平面两自由度精密驱动与定位,具有结构简单、尺寸微小、易于集成、无电磁干扰等特点,适合在有限空间的应用,且采用机电耦合效率高的d33模式的压电叠堆作为输出源,输出能力优异。在精密驱动领域有广阔的应用前景。
附图说明
此处所说明的附图用来提供对本发明的进一步理解,构成本申请的一部分,本发明的示意性实例及其说明用于解释本发明,并不构成对本发明的不当限定。
图1为本发明的微小型两自由度超声电机整体结构示意图;
图2为本发明的x轴运动单元结构示意图;
图3为本发明的y轴运动单元结构示意图;
图4为本发明的底板结构示意图;
图中:1、基座;2、x轴运动单元;2-1、压电叠堆a;2-2、压电叠堆b;2-3、连接杆a;2-4、从动件a;3、y轴运动单元;3-1、压电叠堆c;3-2、压电叠堆d;3-3、连接杆b;3-4、从动件b;4、载物台。
具体实施方式
下面结合附图进一步说明本发明的详细内容及其具体实施方式。
参见图1至图4所示,一种微小型两自由度超声电机,其特征在于:由基座1、x轴运动单元2、y轴运动单元3和载物台4组成;所述的x轴运动单元2通过压电叠堆a2-1固定连接在基座1上;所述的y轴运动单元3通过压电叠堆c3-1固定连接在x轴运动单元2的从动件a2-4上;所述的载物台4固定连接在y轴运动单元3的从动件b3-4上;所述的载物台4可以做成外部矩形、内部中空环形的结构,以搭载微型摄像头,并将一种微小型两自由度超声电机集合到手机、无人机等设备中,可以实现摄像防抖功能。
所述的基座1由凸台a1-1、中空腔体1-2、凸台b1-3组成,凸台a1-1和凸台b1-3的作用是承载x轴运动单元2和y轴运动单元3;中空腔体的作用是适应更多不同类型的被驱目标物体。
所述的x轴运动单元2由压电叠堆a2-1、压电叠堆b2-2、连接杆a2-3、从动件a2-4组成,所述的压电叠堆b2-2粘结在压电叠堆a2-1上,所述的连接杆a2-3粘结在压电叠堆b2-2上,所述的从动件a2-4以自适应预紧的方式安装在连接杆a2-3上。
所述的y轴运动单元3由压电叠堆c3-1、压电叠堆d3-2、连接杆b3-3、从动件b3-4组成,所述的压电叠堆d3-2粘结在压电叠堆c3-1上,所述的连接杆b3-3粘结在压电叠堆d3-2上,所述的从动件b3-4以自适应预紧的方式安装在连接杆b3-3上。
一种微小型两自由度超声电机驱动方法包括以下步骤:
a)给x轴运动单元2的压电叠堆a2-1施加
b)通过控制压电叠堆a2-1和压电叠堆b2-2的激励信号的幅值A、B和相位
以上所述仅为本发明的优选实例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡对本发明所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种微小型两自由度超声电机及其驱动方法
- 一种两自由度超声电机及其驱动方法