开关室操作机器人任务工具总成
文献发布时间:2023-06-19 13:27:45
技术领域
本发明为开关室操作机器人任务工具总成,属于机器人领域。
背景技术
随着智能电网的不断发展,电网设备的不断增多,电网电压也不断提高。为了安全的需要,很多设备部署在配电开关柜中,传统的方法采用人力来操作配电开关柜,电工操作时容易发生安全事故。
随着机器人技术的兴起,配电开关柜开始引入机器人进行自动化或者远程操控。利用功能完善,操作灵活的机器人操作配电柜,既能够提高配电开关柜控制精准程度,又可以提高安全操作系数,保障电网企业对社会供电的稳定性,同时保证电网及其设备的安全性,具有重要的作用和意义。
目前,已经有企业在高压配电机房内配备用于分合闸的机器人,可有效降低人员触电风险。尤其是智能化机器人可做到远程接收信息、自动化操作以及自动化充电等。
但是,配电机房内部为精密设备,机器人在自动巡检或者行驶操作位时,存在碰撞至机房设备上问题,严重时造成设备故障甚至发生短路、断路等事故。
另外,机器人在机房内除实现分合闸功能外,还需识别指示灯状态、操作按钮开关和摇小车开关等功能。
发明内容
为解决上述技术问题,本发明提出一种可在高压配电机房内自主运行、实现分合闸、操作按钮开关、摇小车开关以及识别指示灯状态的机器人。
为实现上述技术目的,本发明提供的技术方案为:
开关室操作机器人任务工具总成,包括:底座和抓手;所述抓手设置于底座上;
所述抓手包括:伸缩驱动件、抓手外壳、手抓A和手抓B;所述伸缩驱动件前端具有沿某一直线往复运行趋势,所述伸缩驱动件前端两侧均设置有直齿条,所述手抓A和手抓B的一端均固定有齿轮,且手抓A齿轮中心和手抓B齿轮中心均与抓手外壳铰接,所述手抓A齿轮和手抓B齿轮与伸缩驱动件的两个直齿条一一对应啮合,且手抓A另一端和手抓B另一端均设置于抓手外壳外侧,所述手抓A齿轮或手抓B齿轮转动均具有手抓A另一端和手抓B另一端相互靠近趋势。
所述手抓A和手抓B内均设置有液压油囊模块,所述液压油囊模块包括:油管、活塞、液压电机、丝杠、油路启闭控制器、前端油囊和挤压油囊;所述手抓A和手抓B一端外壁上均固定有液压电机,所述手抓A和手抓B内部均设置有油管,所述油管为圆柱腔体,所述油管内设置有丝杠和活塞,所述手抓A和手抓B上设置有与丝杠相配合的螺纹孔,丝杠贯穿与其对应的螺纹孔后与液压电机输出轴同轴固定连接,且所述丝杠与活塞铰接,所述活塞相对的油管端头固定有油路启闭控制器,所述前端油囊和挤压油囊均通过油路与油路启闭控制器连通,所述油路启闭控制器用于控制相应油路启闭。
所述油路启闭控制器包括:控制器外壳、活动阀芯和控制阀芯;所述控制器外壳内设置有多个油路,每个油路均与另一个盲孔相交,所述盲孔开口端处固定有控制阀芯,所述盲孔内部活动设置有活动阀芯,且活动阀芯直径大于油路直径,所述活动阀芯在盲孔内某一位置具有将油路完全堵塞的趋势;
所述活动阀芯为永磁铁,所述控制阀芯为电磁铁。
所述抓手A和抓手B结构一致,所述抓手A包括前段杆和后段杆,所述前段杆为一端设置有螺纹孔,另一端为开口的圆柱管,所述前段杆管内为油管,所述前段杆另一端开口处固定有油路启闭控制器;
所述后段杆为弯曲杆,所述后段杆一端设置有与前段杆插接管口,后段杆另一端侧面设置用于夹取物品的凹槽,后段杆另一端端头设置有用于放置前端油囊的管孔,所述后段杆内设置有油管,所述后段杆插接与前段杆上时,所述后段杆的油管与油路启闭控制器对应管口一一连通。
所述凹槽内壁上设置有挤压油囊。
所述伸缩驱动件为电动推杆。
所述底座包括:车体、机械臂和摄像头;所述车体上固定有机械臂和摄像头,所述机械臂前端与伸缩驱动件固定连接;
所述车体设置有车轮机构,所述车轮机构包括:转向驱动、转向器、车轮架和车轮模块;所述车轮架上铰接有车轮模块,所述车轮架与车体固定连接,所述车轮架上固定有转向器,所述转向器的输出轴与车轮模块的转动轴固定连接,所述转向驱动与转向器输入轴连接。
所述底座包括:所述车体侧壁上设置有若干激光雷达。
所述抓手外壳上还固定有深度相机。
所述摄像头为双目摄像头。
所述车轮模块包括:电机架、运行电机和车轮,所述电机架包括固定端面和转动主轴,所述固定端面为竖直面,所述固定端面一侧固定有运行电机,所述固定端面另一侧设置有车轮,所述运行电机输出轴贯穿固定端面与车轮同轴固定连接,所述转动主轴相对固定端面固定设置,所述转动主轴与车轮架通过轴承连接。
所述转向器包括:外壳、丝杠、转向螺母和转向齿轮;所述外壳固定于车轮架上,所述丝杠一端设置于外壳内,且丝杠具有绕其中轴转动趋势,所述丝杠上设置有转向螺母,所述转向螺母中心设置有与丝杠相适应的螺纹孔,所述转向螺母外壁上固定有直齿条,所述外壳内还设置有转向齿轮,所述转向齿轮具有绕其中心转动趋势,所述直齿条与转向齿轮相啮合,所述转向齿轮中心轴与转动主轴同轴固定连接。
所述丝杠另一端与转向驱动固定连接,所述转向驱动为步进电机。
所述车轮模块还包括编码器,所述编码器固定于固定端面另一侧,且编码器输入轴与运行电机输出轴之间通过齿轮传动。
所述转向器还包括转向角度传感器,所述转向角度传感器固定于外壳内,且转向角度传感器输入轴与转向齿轮中心轴之间通过齿轮传动。
所述运行电机为盘式步进电机,且所述盘式步进电机与固定端面之间还设置有行星减速器。
车体内设置有行走控制中心,所述行走控制中心为8位嵌入式处理器,所述转向驱动、运行电机、编码器和转向角度传感器均与行走控制中心电气连接。
本发明与现有技术相比具有以下有益效果:
一、伸缩驱动件通过齿轮直齿条啮合的方式驱动手抓A和手抓B,具有精确控制手抓A和手抓B开合角度的目的,可对精密设备进行精确力度的抓取。
二、本发明采用液压油囊模块,启动前端油囊可实现对按钮下按、门柜抽拉的功能,同时因具有一定的柔软度,可防止机器人用力过大、破坏设备的情况发生;挤压油囊配合手抓A和手抓B抓取杆状物品,稳定抓取的过程中因挤压油囊较大的形变幅度,方便杆状物相对手抓A或手抓B转动。
三、本发明采用油路启闭控制器,配合油管、活塞、液压电机和丝杠等,具有结构简单,布置紧凑,控制方便的优点。
附图说明
图1为本发明结构示意图。
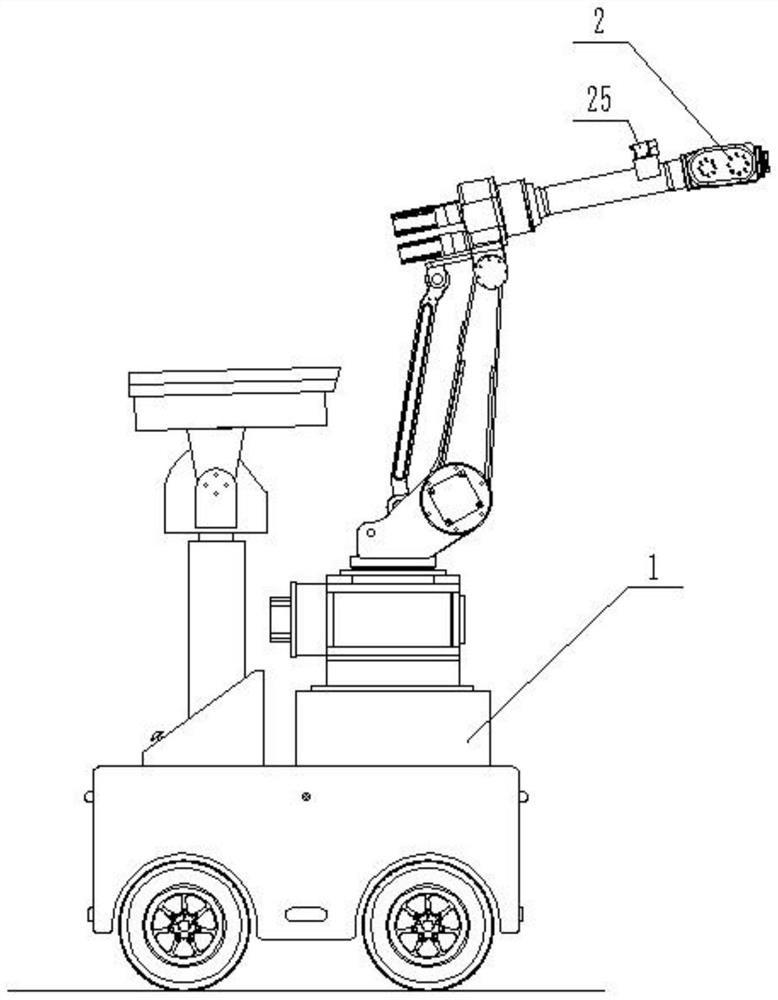
图2为本发明侧面结构示意图。
图3为本发明底座部分结构示意图。
图4为本发明转向器内部结构示意图。
图5为本发明抓手内部结构示意图。
图6为本发明手抓B剖面结构示意图。
图7为本发明手抓A剖面结构示意图。
图8为本发明油路启闭控制器竖直截面示意图。
图9为本发明图6中A-A的剖面示意图。
图中:1为底座,2为抓手,11为车体,12为机械臂,13为摄像头,14为转向驱动,15为转向器,16为车轮架,17为车轮模块,18为激光雷达,151为外壳,152为丝杠,153为转向螺母,154为转向齿轮,171为电机架,172为运行电机,21为伸缩驱动件,22为抓手外壳,23为手抓A,24为手抓B,25为深度相机,231为油管,232为活塞,233为液压电机,234为丝杠,235为油路启闭控制器,236为前端油囊,237为挤压油囊,238为凹槽,2351为控制器外壳,2352为活动阀芯,2353为控制阀芯。
具体实施方式
为进一步理解本发明,下面结合附图和实施例详细阐述:
如图1至图9所示:本发明所述开关室操作机器人任务工具总成,包括:底座1和抓手2;所述抓手2设置于底座1上;
所述抓手2包括:伸缩驱动件21、抓手外壳22、手抓A23和手抓B24;所述伸缩驱动件21前端具有沿某一直线往复运行趋势,所述伸缩驱动件21前端两侧均设置有直齿条,所述手抓A23和手抓B24的一端均固定有齿轮,且手抓A23齿轮中心和手抓B24齿轮中心均与抓手外壳22铰接,所述手抓A23齿轮和手抓B24齿轮与伸缩驱动件21的两个直齿条一一对应啮合,且手抓A23另一端和手抓B24另一端均设置于抓手外壳22外侧,所述手抓A23齿轮或手抓B24齿轮转动均具有手抓A23另一端和手抓B24另一端相互靠近趋势。
所述手抓A23和手抓B24内均设置有液压油囊模块,所述液压油囊模块包括:油管231、活塞232、液压电机233、丝杠234、油路启闭控制器235、前端油囊236和挤压油囊237;所述手抓A23和手抓B24一端外壁上均固定有液压电机233,所述手抓A23和手抓B24内部均设置有油管231,所述油管231为圆柱腔体,所述油管231内设置有丝杠234和活塞232,所述手抓A23和手抓B24上设置有与丝杠234相配合的螺纹孔,丝杠234贯穿与其对应的螺纹孔后与液压电机233输出轴同轴固定连接,且所述丝杠234与活塞232铰接,所述活塞232相对的油管231端头固定有油路启闭控制器235,所述前端油囊236和挤压油囊237均通过油路与油路启闭控制器235连通,所述油路启闭控制器235用于控制相应油路启闭。
所述油路启闭控制器235包括:控制器外壳2351、活动阀芯2352和控制阀芯2353;所述控制器外壳2351内设置有多个油路,每个油路均与另一个盲孔相交,所述盲孔开口端处固定有控制阀芯2353,所述盲孔内部活动设置有活动阀芯2352,且活动阀芯2352直径大于油路直径,所述活动阀芯2352在盲孔内某一位置具有将油路完全堵塞的趋势;
所述活动阀芯2352为永磁铁,所述控制阀芯2353为电磁铁。
所述抓手A和抓手B结构一致,所述抓手A包括前段杆和后段杆,所述前段杆为一端设置有螺纹孔,另一端为开口的圆柱管,所述前段杆管内为油管231,所述前段杆另一端开口处固定有油路启闭控制器235;
所述后段杆为弯曲杆,所述后段杆一端设置有与前段杆插接管口,后段杆另一端侧面设置用于夹取物品的凹槽238,后段杆另一端端头设置有用于放置前端油囊236的管孔,所述后段杆内设置有油管,所述后段杆插接与前段杆上时,所述后段杆的油管与油路启闭控制器235对应管口一一连通。
所述凹槽238内壁上设置有挤压油囊237。
所述伸缩驱动件21为电动推杆。
所述底座1包括:车体11、机械臂12和摄像头13;所述车体11上固定有机械臂12和摄像头13,所述机械臂12前端与伸缩驱动件21固定连接;
所述车体11设置有车轮机构,所述车轮机构包括:转向驱动14、转向器15、车轮架16和车轮模块17;所述车轮架16上铰接有车轮模块17,所述车轮架16与车体11固定连接,所述车轮架16上固定有转向器15,所述转向器15的输出轴与车轮模块17的转动轴固定连接,所述转向驱动14与转向器15输入轴连接。
所述底座1包括:所述车体11侧壁上设置有若干激光雷达18。
所述抓手外壳22上还固定有深度相机25。
所述摄像头13为双目摄像头。
所述车轮模块17包括:电机架171、运行电机172和车轮,所述电机架171包括固定端面和转动主轴,所述固定端面为竖直面,所述固定端面一侧固定有运行电机172,所述固定端面另一侧设置有车轮,所述运行电机172输出轴贯穿固定端面与车轮同轴固定连接,所述转动主轴相对固定端面固定设置,所述转动主轴与车轮架16通过轴承连接。
所述转向器15包括:外壳151、丝杠152、转向螺母153和转向齿轮154;所述外壳151固定于车轮架16上,所述丝杠152一端设置于外壳151内,且丝杠152具有绕其中轴转动趋势,所述丝杠152上设置有转向螺母153,所述转向螺母153中心设置有与丝杠152相适应的螺纹孔,所述转向螺母153外壁上固定有直齿条,所述外壳151内还设置有转向齿轮154,所述转向齿轮154具有绕其中心转动趋势,所述直齿条与转向齿轮154相啮合,所述转向齿轮154中心轴与转动主轴同轴固定连接。
所述丝杠152另一端与转向驱动14固定连接,所述转向驱动14为步进电机。
所述车轮模块17还包括编码器,所述编码器固定于固定端面另一侧,且编码器输入轴与运行电机172输出轴之间通过齿轮传动。
所述转向器15还包括转向角度传感器,所述转向角度传感器固定于外壳151内,且转向角度传感器输入轴与转向齿轮154中心轴之间通过齿轮传动。
所述运行电机172为盘式步进电机,且所述盘式步进电机与固定端面之间还设置有行星减速器。
车体11内设置有行走控制中心,所述行走控制中心为8位嵌入式处理器,所述转向驱动14、运行电机172、编码器和转向角度传感器均与行走控制中心电气连接。
本发明具体实施方式如下:
机器人底座1上安装有若干激光雷达18,采用SLAM技术实现机器人在配电机房内定位、导航和姿态位置确定。
机器人自动行驶至对应配电柜前,停止运行。
采用摄像头13识别被操作设备同时配合深度相机25定位其位置,机器人计算数据后控制机械臂12将抓手2移送至被操作设备处,伸缩驱动件21精确控制伸缩长度,进而控制手抓A23和手抓B24的开合角度,便于对微小部件和小空间位置内的设备进行操作。同时液压油囊模块具有一定缓冲作用,为抓手2操作提供了一定缓冲余量,且便于对多种操作功能。
上述实施方式仅示例性说明本发明的原理及其效果,而非用于限制本发明。对于熟悉此技术的人皆可在不违背本发明的精神及范畴下,对上述实施例进行修饰或改进。因此,凡举所述技术领域中具有通常知识者在未脱离本发明所揭示的精神与技术思想下所完成的一切等效修饰或改变,仍应由本发明的权利要求所涵盖。
- 开关室操作机器人任务工具总成
- 通用协作机器人、机器人系统及通用协作机器人执行操作任务的控制方法