一种拉丝机精确调速控制系统及其方法
文献发布时间:2023-06-19 13:30:50
技术领域
本发明涉及一种拉丝机精确调速控制系统及其方法。
背景技术
在工程实际中,因电机频率是理论计算出来的值,同时由于频率转换成电机转速的机械运动,也有延迟,因此,与理想状态不符;电机在大负载时有拖曳现象;模具在拉丝过程中,孔径会磨损变大;从启动到稳定工作状态,模具及材料温度有变化;材料的硬度及表面合含成分等都有差异;由于存在这些众多因素,使得进线速度和出线速度不能精确匹配,而造成断丝或松套。
钢丝在拉拔过程中,理想状态下,前后级卷筒速度是匹配的,但存在上述所说的诸多因素,导致存在频率误差Δf,使前后速度不能更好匹配。
发明内容
为解决上述技术问题,本发明提供了一种拉丝机精确调速控制系统及其方法,该拉丝机精确调速控制系统及其方法能够基于钢丝拉拔过程中的受力情况精确计算出前级卷筒和后级卷筒之间的频率误差,从而使前后级卷筒速度达到最佳匹配状态,从而避免钢丝出现断丝和松套,造成设备停机无法生产。
本发明通过以下技术方案得以实现。
本发明提供的一种拉丝机精确调速控制系统,包括拉丝机的前级卷筒和后级卷筒;所述前级卷筒和后级卷筒之间装有位移传感器,前级卷筒和后级卷筒之间的钢丝过位移传感器并带动位移传感器移动;通过位移传感器的位移数据对前级卷筒和后级卷筒的转速进行调整。
所述位移传感器的移动方向垂直于前级卷筒和后级卷筒的中心连线。
所述位移传感器装在调谐臂上,调谐臂的延伸方向为位移传感器的移动方向,调谐臂用于复位位移传感器的位移。
所述位移传感器的初始位置位于调谐臂的端部。
本发明还提供一种拉丝机精确调速控制方法,采用如上所述的拉丝机精确调速控制系统,包括以下步骤:
①取位移值:从位移传感器获取当前周期的位移数据;
②计算差值:根据位移数据,计算位移调整量;
③调整控制值:根据位移调整量,计算前级卷筒和/或后级卷筒的转速控制差量;
④输出控制:将前级卷筒和/或后级卷筒的转速控制差量分别输出至前级卷筒和/或后级卷筒的转速控制模块,使前级卷筒和/或后级卷筒的转速控制量叠加转速控制差量,然后返回至步骤①。
所述步骤②过程采用S7-300系列PLC的SFB41模块。
所述步骤②中,采用PID算法计算位移调整量。
所述PID算法,计算位移调整量Δf=M
M
MP
MI
其中,MP
所述步骤③中,计算后级卷筒的转速控制差量f
本发明的有益效果在于:能够基于钢丝拉拔过程中的受力情况精确计算出前级卷筒和后级卷筒之间的频率误差,从而使前后级卷筒速度达到最佳匹配状态,从而避免钢丝出现断丝和松套,造成设备停机无法生产。
附图说明
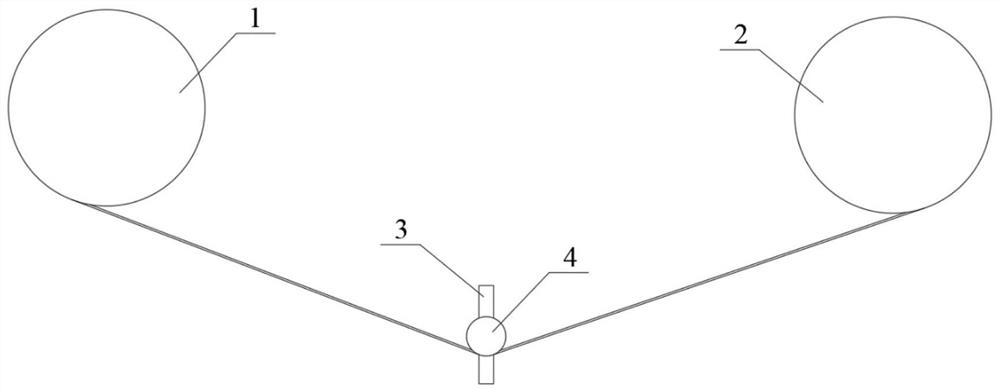
图1是本发明的安装结构示意图;
图2是本发明的流程示意图。
图中:1-前级卷筒,2-后级卷筒,3-调谐臂,4-位移传感器。
具体实施方式
下面进一步描述本发明的技术方案,但要求保护的范围并不局限于所述。
实施例1
如图1所示的一种拉丝机精确调速控制系统,包括拉丝机的前级卷筒1和后级卷筒2;所述前级卷筒1和后级卷筒2之间装有位移传感器4,前级卷筒1和后级卷筒2之间的钢丝过位移传感器4并带动位移传感器4移动;通过位移传感器4的位移数据对前级卷筒1和后级卷筒2的转速进行调整。
实施例2
基于实施例1,位移传感器4的移动方向垂直于前级卷筒1和后级卷筒2的中心连线。
实施例3
基于实施例2,位移传感器4装在调谐臂3上,调谐臂3的延伸方向为位移传感器4的移动方向,调谐臂3用于复位位移传感器4的位移。
实施例4
基于实施例3,位移传感器4的初始位置位于调谐臂3的端部。
实施例5
如图2所示的一种拉丝机精确调速控制方法;采用上述实施例1~4中任一,包括以下步骤:
①取位移值:从位移传感器4获取当前周期的位移数据;
②计算差值:根据位移数据,计算位移调整量;
③调整控制值:根据位移调整量,计算前级卷筒1和/或后级卷筒2的转速控制差量;
④输出控制:将前级卷筒1和/或后级卷筒2的转速控制差量分别输出至前级卷筒1和/或后级卷筒2的转速控制模块,使前级卷筒1和/或后级卷筒2的转速控制量叠加转速控制差量,然后返回至步骤①。
实施例6
基于实施例5,步骤②过程采用S7-300系列PLC的SFB41模块。
实施例7
基于实施例5,步骤②中,采用PID算法计算位移调整量。
实施例8
基于实施例5,所述PID算法为计算位移调整量Δf=M
M
MP
MI
其中,MP
实施例9
基于实施例5,以仅计算后级卷筒2的转速控制差量为例,步骤③中,计算后级卷筒2的转速控制差量f
- 一种拉丝机精确调速控制系统及其方法
- 改进的光纤高速精确拉丝机