细长工件竖向输送机械及系统
文献发布时间:2023-06-19 13:45:04
技术领域
本发明涉及输送机械自动化技术领域,尤其提供了一种适合于细长工件竖向输送的自动化设备。
背景技术
在工业工程中,部分细长工件需要在保持竖向的状态下进行大距离竖向的输送,在细长工件浸漆、镀锌等表面处理等场合,例如将细长工件、管件由地面输送至的距离地面高度较大的平台上,以便于将清洗后的细长工件进一步的投放至浸漆、镀锌处理液池内,目前缺少能够完成细长工件保持竖向的状态下进行大距离的竖向输送的机械设备,一般采用吊车完成,而吊车输送细长工件需要细长工件捆扎、挂取等作业过程,并且细长工件捆扎、挂取需工人近距离操作,不仅不利于安全健康,而且操作效率低,不适合于自动化生产进行。而且,作业过程中水平放置,容易造成表面粘附杂质,造成后续浸漆、镀锌等处理质量降低,影响产品质量。
发明内容
为了解决长度较大的细长工件的自动化夹取、竖向输送和释放,并使得输送过程中细长工件保持在稳定的竖直状态,本发明提供了一种细长工件竖向输送机械。
为了达到上述目的,本发明的技术方案为:
一种细长工件竖向输送机械,包括机架、链条机构、夹取机构、导向机构和夹取控制单元。
所述链条机构,包括沿竖向间隔布置的链轮、设置在链轮之间的链条,链轮通过马达驱动,链条机构设置有控制马达启停的马达控制单元。
所述夹取机构包括多个并等间距的设置在链条上,各夹取机构包括钳座和钳爪;所述钳座的后端与单个链节固定连接,所述钳爪能够横向开合的设置在钳座前端,钳座设置有用于驱动钳爪开合的第一电动线性缸。
所述导向机构包括环形导轨和导向座,所述环形导轨设置在机架上并位于链条外侧,环形导轨与链条平行布置;所述导向座设置在钳座上,导向座设置有支撑到环形导轨外侧的支撑轮组。
所述夹取控制单元包括第一导电滑轨、第一导电刷、电源和第一控制器,所述第一导电刷设置在钳座上并与第一导电滑轨滑动电连接,所述第一电动线性缸与第一导电刷电连接;所述第一控制器设置在电源与第一导电滑轨之间,第一控制器通过控制电源到第一导电滑轨的电流通断实现多个夹取机构的第一电动线性缸的同步控制,以使得多个夹取机构共同完成竖向状态的细长工件的夹取。
可选地,所述细长工件竖向输送机械还包括托载机构,所述托载机构包括多个并等间距的设置在链条上,各相邻的托载机构之间分别设置有多个所述的夹取机构。
通过托载机构的设置,能够对多个夹取机构的钳爪所夹取的细长工件的下端进行托载,防止细长工件由钳爪之间的轴向滑溜。对于薄壁、外表光滑的细长工件,如管件,钳爪抓力过大,容易造成管件变形损坏,托载机构托载情况下,可以在钳爪抓力较小的情况下输送,从而保证管件输送的安全。
可选地,所述托载机构包括托载架和活动托板,托载架的后端与链条的单个链节固定连接,活动托板铰接在托载架前端,托载架设置有用于驱动活动托板绕横向铰链转动的第二电动线性缸。
通过托载机构设置可翻转的活动托板,在夹取机构的钳爪夹取细长工件过程中,活动托板处于向下翻转状态,防止夹取动作中活动托板对细长工件端部的阻挡,夹取动作后,活动托板向上翻转,实现对细长工件下端托载。
可选地,所述机座设置有第二导电滑轨滑动电连接,所述托载架设置有第二导电刷,所述第二电动线性缸与第二导电刷电连接,第一控制器通过控制电源到第二导电滑轨的电流通断实现托载机构的第二电动线性缸的控制,以使得活动托板对竖向状态的细长工件下端的托载。
通过第二导电刷与第二导电滑轨的滑动电连接,实现电源与移动状态的第二电动线性缸的电流连通,并通过第一控制器实现电源的通断,从而控制第二电动线性缸的动作,以实现活动托板的翻转动作。
可选地,所述夹取机构包括沿横向相对布置的两个钳爪,各钳爪分别铰接在钳座前端,所述第一电动线性缸包括两个,各第一电动线性缸的缸体与钳座铰接而活动杆与不同的钳爪铰接。
通过夹取机构的两个钳爪铰接在钳座前端,第一电动线性缸驱动两个钳爪翻转,实现竖向状态的细长工件的夹取。
可选地,所述夹取机构包括沿横向相对布置的两个钳爪,两个钳爪呈对称的滑设在钳座前端,所述第一电动线性缸包括两个,各第一电动线性缸的缸体与钳座固定连接而活动杆与不同的钳爪固定连接。
通过夹取机构的两个钳爪滑设在钳座前端,第一电动线性缸驱动两个钳爪相对移动,实现竖向状态的细长工件的夹取。
可选地,所述环形导轨包括两个平行布置、等长直线段和分别连接在两个直线段之间的圆弧段,所述直线段设置有用于容纳支撑轮的直线导槽。
进一步的,本发明提供了一种细长工件竖向输送系统,包括上述的细长工件竖向输送机械,还包括装载架和卸载架,所述机架设置有沿竖向间隔布置的装载架、卸载架,装载架与卸载架的间距为相邻的托载机构间距的整数倍,所述装载架、卸载架的前端与链条间隔布置,所述装载架设置有用于检测托载机构的第一传感器,所述卸载架设置有用于检测托载机构的第二传感器,所述第一传感器、第二传感器分别与马达控制单元、夹取控制单元连接。
通过在装载架处设置第一传感器,使得托载机构停止在装载架处,以完成细长工件的夹取、托载动作;通过在装载架处设置第二传感器,使得托载机构停止在卸载架处,以完成细长工件的释放、卸载动作。
可选地,装载架、卸载架分别设置有用于保持细长工件的竖向状态的扶持机构。
可选地,所述装载架设置有能够横向移动的装载滑座,装载滑座上设置有用于夹持竖直状态管件的工件夹钳;所述卸载架设置有能够横向移动的卸载滑座,卸载滑座上设置有用于夹持竖直状态管件的另一工件夹钳。
同时,本发明提供了一种细长工件竖向输送方法,使用所述的细长工件竖向输送系统进行细长工件的输送作业,具体如下:
将细长工件竖向状态的放置在装载架上;
马达驱动链条移动,带动第一组夹取机构移动至装载架处;
在装载架处,第一组夹取机构的多个钳爪同时合并夹取装载架上的竖向状态的细长工件;
马达驱动链条移动,带动第一组夹取机构及夹取的细长工件移动至卸载架处;
在卸载架处,第一组夹取机构的钳爪同时打开释放竖向状态的细长工件至卸载架上;
第一组夹取机构移动至卸载架并卸载细长工件的同时,第二组夹取机构移动至装载架并装载另一细长工件;链条单向移动,依次完成多根细长杆件的装载和卸载作业。
所提供的细长工件竖向输送机械,通过分布在链条驱动的夹取机构完成细长工件的自动夹取、竖向输送和自动释放过程,其技术优势主要体现在:
1.在竖向布置的链条上等间距的设置夹取机构,通过多个夹取机构共同对竖向状态的单个细长工件夹取,并通过马达驱动链轮转动,带动布置在链条上多个夹取机构竖向移动,以实现细长工件竖向输送。由于多个夹取机构同步动作,适合于长度远大于单个链节高度的细长工件的夹取,并且细长工件在夹取和竖向输送过程中始终保持稳定竖向状态。
2.设置了夹取控制单元,通过机架上的导电滑轨、钳座上的导电刷实现电源与驱动钳爪开合的第一电动线性缸之间的电连接,并在电源与导电滑轨之间设置控制电流通断的第一控制器,实现第一电动线性缸的动作控制,从而控制多个夹取机构的同步开合动作,第一控制器设置在机架上而不是支撑架上,有利于减轻支撑架结构、体积,第一控制器静态设置在机架上,结构简单,便于控制。
3.在链条上设置了托载机构,在输送过程中,通过活动托板对夹取机构夹取的细长工件的下端进行托载,防止细长工件沿着轴向滑动、掉落,利于输送过程中细长工件的稳定性,尤其适合于表面光滑或者夹紧力不宜过大、仅通过夹取机构难以牢固抓取的薄壁细长工件,如薄壁圆管、薄壁钣金方管等。
4.在机架设置了对夹取机构起到状态扶正作用的环形导轨,在夹取机构的设置与环形导轨配合的支撑轮组,防止细长工件倾斜而与链条发生干涉问题,以保持夹取、输送细长工件过程的稳定进行。
附图说明
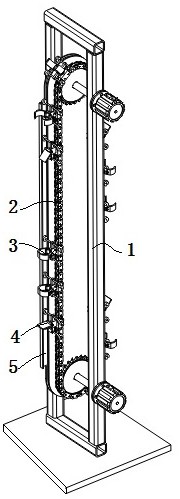
图1为本发明提供的细长工件竖向输送机械的三维结构示意图。
图2为链条上仅设置夹取机构的结构示意图。
图3为夹取机构的结构示意图。
图4为夹取机构的钳爪开合控制原理图。
图5为链条上设置有夹取机构和托载机构的结构示意图。
图6为图5的局部示意图。
图7为托载机构的结构示意图。
图8为托载机构的活动托板翻转控制原理图。
图9为细长工件被夹取和托载的状态示意图。
图10为环形导轨的结构示意图。
图11为夹取机构和托载机构被环形导轨支撑导向的状态示意图。
图12为细长工件被环形导轨导向的状态示意图。
图13为提供的细长工件竖向输送系统的结构示意图。
图14为装载架和卸载架的结构示意图。
图15为工件夹钳的机构示意图。
图16为完成细长工件装载后的状态示意图。
图17为竖向输送过程中的状态示意图。
图中,1—机架;2—链条机构,21—链轮,22—链条,23—马达;3—夹取机构,31—钳座,32—钳爪,33—第一电动线性缸,34—第一导电滑轨,35—第一导电刷,36—第一控制器;4—托载机构,41—托载架,42—活动托板,43—第二电动线性缸,44—第二导电刷,45—第二导电滑轨,46—第二控制器;5—导向机构,51—环形导轨,511—直线导槽,512—直线段,513—圆弧段,52—导向座,53—支撑轮组;6—装载架,61—装载滑座,62—工件夹钳,621—竖向支架,622—支座,623—夹爪,624—气/液动缸;7—卸载架,71—卸载滑座;8—细长工件。
具体实施方式
本发明的目的是提供了一种细长工件竖向输送机械用于长度较大的细长工件的自动化夹取、竖向输送和释放,并使得输送过程中细长工件保持在稳定的竖直状态。
图1,本发明提供的细长工件竖向输送机械的三维结构示意图。
如图1所示,本发明的整体技术方案:提供的细长工件竖向输送机械,包括机架1、链条机构2、夹取机构3、导向机构5和夹取控制单元。
图2,链条上仅设置夹取机构的结构示意图。
如图2所示,链条机构2,起到驱动夹取机构移动的作用。
链条机构2包括沿竖向间隔布置的两个链轮21,两个链轮21之间设置张紧状态的链条22,其中的一个链轮21通过马达23驱动,马达启停控制通过马达控制单元完成,以实现链条21的运动和停止。
图3,夹取机构的结构示意图。
如图3所示,夹取机构3,起到夹取细长工件8并保持竖直状态的作用。
夹取机构3包括多个并等间距的设置在链条22上,各夹取机构3设置有用于夹取细长工件8的钳爪32,并且通过多个夹取机构的钳爪32同时对细长工件8夹取,以使得钳爪32能够沿着细长工件8的轴向多处进行夹取,从而保证长度远大于链条的链节长度的细长杆件8的夹取牢固、竖直状态的稳定。
图10,环形导轨的结构示意图。
图11,夹取机构和托载机构被环形导轨支撑导向的状态示意图。
如图10、图11所示,导向机构5,对夹取机构3起到扶持作用。
导向机构5包括环形导轨51和导向座52,环形导轨51设置在机架1上并位于链条22外侧,环形导轨51与链条22平行布置,环形导轨51的走向与链条22的走向一致,导向座52设置在钳座31上,导向座52设置有支撑到环形导轨51外侧的支撑轮组53。
图2,链条上仅设置夹取机构的结构示意图。
图3,夹取机构的结构示意图。
结合图2和图3,说明本发明的夹取机构的具体技术方案:
本发明的细长工件竖向输送机械,在竖向布置的链条上等间距的设置夹取机构,通过多个夹取机构3共同对竖向状态的单个细长工件8夹取,并通过马达23驱动链轮21转动,带动布置在链条22上多个夹取机构3竖向移动,以实现细长工件8竖向输送。由于多个夹取机构3同步动作,适合于长度远大于单个链节高度的细长工件8的夹取,并且细长工件8在夹取和竖向输送过程中始终保持稳定竖向状态。
夹取机构3包括钳座31和钳爪32;钳座31的后端与单个链节固定连接,钳爪32能够横向开合的设置在钳座31前端,钳座31设置有用于驱动钳爪32开合的第一电动线性缸33。
如图3所示,本发明提供的夹取机构的实施具体技术方案:
在一些实施例中,夹取机构3包括沿横向相对布置的两个钳爪32,各钳爪32分别铰接在钳座31前端,第一电动线性缸33包括两个,各第一电动线性缸33的缸体与钳座铰接而活动杆与不同的钳爪32铰接。
第一电动线性缸33在与电源连通时,活动杆伸出驱动两个钳爪32同时向内翻转,实现对竖向状态的细长工件8的夹取。第一电动线性缸33在与电源断开时,活动杆收回驱动两个钳爪32同时向外翻转,释放被夹取的细长工件8。
夹取机构的第二种实施具体技术方案:在另一些实施例中,夹取机构包括沿横向相对布置的两个钳爪,两个钳爪呈对称的滑设在钳座前端,第一电动线性缸包括两个,各第一电动线性缸的缸体与钳座固定连接而活动杆与不同的钳爪32固定连接。
第一电动线性缸在与电源连通时,活动杆伸出驱动两个钳爪同时向内移动,实现对竖向状态的细长工件的夹取。第一电动线性缸在与电源断开时,活动杆收回驱动两个钳爪同时向外移动,释被夹取的细长工件。
结合图4说明夹取控制的具体技术方案:
第一电动线性缸33通过电力驱动动作,由于第一电动线性缸33随着链条22的连接移动,电源位置固定,两者无法使用固定的电线连接,为此,采用第一导电滑轨34与第一导电刷35的滑动电连接,并在电源与第一导电滑轨34之间设置第一控制器36控制电源电流的通断。
如图4所示,在具体实施中,夹取控制单元包括第一导电滑轨34、第一导电刷35、电源和第一控制器36,第一导电滑轨34沿竖向设置在机架1上并与环形导轨51的一侧的直线段相平行,第一导电刷35设置在钳座31上并与第一导电滑轨34滑动电连接,第一电动线性缸33与第一导电刷35电连接;第一控制器36设置在电源与第一导电滑轨34之间,第一控制器36通过控制电源到第一导电滑轨34的电流通断实现多个夹取机构的第一电动线性缸35的同步控制,以使得多个夹取机构3共同完成竖向状态的细长工件8的夹取。
具体地,第一导电滑轨34为直线状并布置在环状导轨34的靠近装载架6、卸载架7一侧的直线段上,环状导轨51的其他位置不布置第一导电滑轨34。因此,夹取机构3仅在移动至环状导轨34的靠近装载架6、卸载架7一侧时,第一导电刷35才与第一导电滑轨34接触,进行电连通,在其他位置,第一导电刷35不与第一导电滑轨34接触,不进行电连通。这样设计,使得夹取机构3、托载机构4在远离装载架6、卸载架7一侧时,第一电动线性缸33与电源断开状态,夹取机构3的钳爪保持在打开的状态。这与第一控制器36控制电源、电滑轨的电流通断无关。
夹取控制单元通过机架1上的第一导电滑轨34、钳座31上的第一导电刷35实现电源与驱动钳爪32开合的第一电动线性缸33之间的电连接,并在电源与第一导电滑轨34之间设置控制电流通断的第一控制器36,实现第一电动线性缸35的动作控制,从而控制多个夹取机构3的同步开合动作,第一控制器36设置在机架1上而不是钳座31上,有利于减轻钳座31结构、体积,结构简单,便于安装布置。
结合图5、图6和图7说明托载机构设置有可翻转的活动托板的具体技术方案:
对于薄壁、外表光滑的细长工件8,如外表光滑度较高的薄壁管件,钳爪32夹紧力过大,容易造成薄壁管件变形损坏,而钳爪32夹紧力过小,夹紧产生的摩擦力较小,使得薄壁管件容易沿着链条22的长度方向滑溜,无法实现薄壁管件的正常输送。
图5,链条上设置有夹取机构和托载机构的结构示意图。图6,图5的局部示意图。图7,托载机构的结构示意图。图9,细长工件被夹取和托载的状态示意图。
如图5、图6、图7、图8和图9所示,在一些实施例中,在链条22上设置了对细长工件8的下端进行托载的托载机构4,在夹取机构的钳爪对细长工件的夹紧情况下,托载机构的钳爪对细长工件的下端托起,从而既能够保持细长工件8的竖向状态稳定,又能保持细长工件8轴向位置稳定,不会产生轴向滑溜。
在具体实施中,托载机构4包括多个并等间距的设置在链条22上,各相邻的托载机构4之间分别设置有多个的夹取机构3。
图7,托载机构的结构示意图。
如图7所示,在具体实施中,托载机构4包括托载架41和活动托板42,托载架41的后端与链条22的单个链节固定连接,活动托板42铰接在托载架41前端,托载架41设置有用于驱动活动托板42绕横向铰链转动的第二电动线性缸43。
通过托载机构4设置可翻转的活动托板42,在夹取机构3的钳爪32夹取细长工件8过程中,活动托板42处于向下翻转状态,防止夹取动作中活动托板42对细长工件8端部的阻挡,夹取动作后,活动托板42向上翻转,实现对细长工件8下端托载。
在细长工件8输送过程中使用托载机构4进行细长工件8托载的方法,具体如下:
在装载架7处,夹取机构3的钳爪32夹取细长工件8后,链条22带动夹取机构3及细长工件8竖向移动一小段距离后,托载机构4的活动托板42绕铰链向上翻转,对竖向状态的细长工件8下端进行托载;
在夹取机构和工件未到达卸载架前,托载机构的活动托板绕铰链向下翻转为卸载架让出空间,夹取机构的钳爪张开释放细长工件。
在链条上设置了托载机构4,在输送过程中,通过活动托板42对夹取机构3夹取的细长工件8的下端进行托载,防止细长工件8沿着轴向滑动、掉落,利于输送过程中细长工件8的稳定性,尤其适合于表面光滑或者夹紧力不宜过大、仅通过夹取机构3难以牢固抓取的薄壁细长工件8,如薄壁圆管、薄壁钣金方管等。
图8,托载机构的活动托板翻转控制原理图。
结合图8说明托载机构控制的具体方案:
如图8所示,与夹取机构3的第一电动线性缸33一样,托载机构4的第二电动线性缸43也是通过电力驱动动作,由于第二电动线性缸43随着链条22的连接移动,电源位置固定,两者无法使用固定的电线连接,为此,采用第二导电滑轨45与第二导电刷44的滑动电连接,并在电源与第二导电滑轨45之间设置第二控制器46控制电源电流的通断。
如图8所示,在具体实施中,机架上设置与第一导电滑轨34平行布置的第二导电滑轨45,托载架设置有第二导电刷44,第二电动线性缸43与第二导电刷44电连接,第二导电刷44设置在钳座31上并与第二导电滑轨45滑动电连接,第二控制器46通过控制电源到第二导电滑轨45的电流通断实现托载机构4的第二电动线性缸43的控制,以使得活动托板42对竖向状态的细长工件8下端的托载。
通过第二导电刷44与第二导电滑轨45的滑动电连接,实现电源与移动状态的第二电动线性缸43的电流连通,并通过第二控制器46实现电源的通断,从而控制第二电动线性缸43的动作,以实现活动托板42的翻转动作。
同理,由于第二导电滑轨45为直线状并布置在环状导轨的靠近装载架6、卸载架7一侧的直线段上,环状导轨51的其他位置不布置第二导电滑轨45。托载机构4仅在移动至环状导轨51的靠近装载架6、卸载架7一侧时,第二导电刷44才与第二导电滑轨45接触,进行电连通,在其他位置,第二导电刷44不与第二导电滑轨45接触,不进行电连通。这种结构设计,使得夹取机构3、托载机构4在远离装载架6、卸载架7一侧时,第二电动线性缸43与电源断开状态,托载机构4的活动托板42保持在向下翻转的状态。这与第二控制器46控制电源、电滑轨的电流通断无关。
图10,环形导轨的结构示意图。图11,夹取机构和托载机构被环形导轨支撑导向的状态示意图。图12,细长工件被环形导轨导向的状态示意图。
结合图10、图11和图12说明导向机构的具体技术方案:
导向机构5包括环形导轨51和导向座52,环形导轨51设置在机架1上并位于链条22外侧,环形导轨51与链条22平行布置;在具体实施中,环形导轨51包括两个并对称的布置在链条22宽度方向两侧,两个环形导轨51之间间隔布置而构成与链条22走向一致的间隙。
图10,环形导轨的结构示意图。
如图10所示,具体的,所述环形导轨包括两个平行布置、等长直线段512和分别连接在两个直线段之间的圆弧段513,所述直线段设置有用于容纳支撑轮的直线导槽511。
图11,夹取机构和托载机构被环形导轨支撑导向的状态示意图。
如图11所示,钳座31由两个环形导轨51的外侧伸出,导向座52安装在钳座31上并位于环形导轨51外,导向座52设置有支撑到环形导轨51外侧的支撑轮组53,支撑轮组53的支撑轮包括两组并沿着链条22的宽度方向对称布置,各支撑轮的轮体靠近钳爪的一侧设置有外径大于轮体的轮缘,轮体压紧在环形导轨外侧面,从而对钳座实现垂直于链轴方向的支撑;轮缘外侧靠紧在环形导轨的靠近间隙的边侧面,从而对钳座实现平行于链轴轴向的支撑,保证钳座的状态稳定。
图12,细长工件被环形导轨导向的状态示意图。
如图11所示,在机架1设置了对夹取机构3和起到状态扶正作用的环形导轨51,在夹取机构3的设置与环形导轨51配合的支撑轮组53,防止细长工件8倾斜而与链条22发生干涉问题,以保持夹取、输送细长工件8过程的稳定进行。
图13,提供的细长工件竖向输送系统的结构示意图。图14,装载架和卸载架的结构示意图。图15,工件夹钳的机构示意图。
结合图13、图14和图15所示,说明本发明提供的一种细长工件竖向输送系统的具体技术方案:
如图13所示,本发明提供的一种细长工件竖向输送系统,包括所述的细长工件竖向输送机械,还包括装载架6和卸载架7,所述装载架6、卸载架7沿竖向间隔布置设置在机架上。
装载架6、卸载架7沿竖向间隔布置的设置在机架1上,装载架6与卸载架7的竖向间距为相邻的托载机构4间距的整数倍。
装载架6,用于向夹取机构3提供竖直状态的细长工件8。
卸载架7,用于接收竖向输送后、从夹取机构3取下的细长工件8。
如图14所示,在一些实施例中,所述装载架设置有能够横向移动的装载滑座,装载滑座上设置有用于夹持竖直状态管件的工件夹钳62;所述卸载架设置有能够横向移动的卸载滑座,卸载滑座上设置有用于夹持竖直状态管件的另一工件夹钳。
如图15所示,装载滑座的工件夹钳62包括竖向支架621、夹座622和夹爪623。竖向支架621固定安装在装载滑座上夹座622包括多个沿竖向间隔布置的设置在固定连接竖向支架621上,夹爪623能够横向开合的设置在夹座622前端,夹座622设置有用于驱动钳爪623开合的气/液动缸624。
卸载滑座的工件夹钳与装载滑座的工件夹钳结构相同,不再赘述。
在另一些实施例中,在装载架6、卸载架7处,为了保持细长杆件8的竖向状态的稳定,分别设置有用于保持细长工件8的竖向状态的夹持架,在一些实施例中,扶持架沿竖向间隔布置有多个,各扶持架前端设置有与细长工件外形配合的凹槽,凹槽朝向链条一侧设置有前开口。
实现托载机构、夹取机构在装载架、卸载架处停止的具体技术方案:
装载架6、卸载架7的前端与链条22间隔布置,装载架6设置有用于检测托载机构的第一传感器,卸载架7设置有用于检测托载机构的第二传感器,第一传感器、第二传感器分别与马达控制单元、夹取控制单元连接。
通过在装载架6处设置第一传感器,使得托载机构4停止在装载架6处,以完成细长工件8的夹取、托载动作;通过在装载架7处设置第二传感器,使得托载机构4停止在卸载架处,以完成细长工件8的释放、卸载动作。
图16,完成细长工件装载后的状态示意图。图17,竖向输送过程中的状态示意图。
结合图16、图17说明使用本发明提供的细长工件竖向输送系统进行细长工件竖向输送方法:
将细长工件8竖向状态的放置在装载架6上;
马达23驱动链条22移动,带动第一组夹取机构301移动至装载架6处;
在装载架6处,第一组夹取机构301的多个钳爪32同时合并夹取装载架6上的竖向状态的细长工件8;
马达23驱动链条22移动,带动第一组夹取机构301及夹取的细长工件8移动至卸载架7处;
在卸载架7处,第一组夹取机构301的钳爪22同时打开释放竖向状态的细长工件8至卸载架7上;
第一组夹取机构301移动至卸载架6并卸载细长工件8的同时,第二组夹取机构302移动至装载架6并装载另一细长工件8;链条22沿着原方向继续移动,依次完成多根细长杆件8的装载和卸载作业。