精制机
文献发布时间:2023-06-19 19:37:02
技术领域
本发明涉及精制机,尤其涉及不进行定子打浆部与转子打浆部之间的间隙的调整,而可变地控制转子打浆部的马达的旋转来对应原料的精制机。
背景技术
以往,作为进行纸浆打浆的装置有精制机(例如,专利文献1记载的精制机)。
该精制机实现定子打浆部与转子打浆部之间的间隙的调整,从而将原料打浆。
现有技术文献
专利文献1:日本专利第4518711号公报
发明内容
发明所要解决的课题
然而,当原料例如纤维较短、绵软时,定子打浆部与转子打浆部之间的间隙的调整存在极限,无法对应原料。
本申请发明人经过反复试验,结果发现不进行定子打浆部与转子打浆部之间的间隙的调整,而着眼于可变地控制转子打浆部的马达的旋转来对应原料。
本发明是考虑上述实际情况而完成的,其目的在于提供不进行定子打浆部与转子打浆部之间的间隙的调整,而可变地控制转子打浆部的马达的旋转来对应原料的精制机。
用于解决课题的方案
第一方案记载的精制机将供给至定子打浆部与转子打浆部之间的原料打浆,且将打浆后的所述原料排出,所述精制机具备:旋转轴;转子打浆部,其安装于该旋转轴;马达,其驱动所述旋转轴;以及马达控制部,其可变地控制该马达的旋转,利用所述马达控制部来控制所述转子打浆部的马达的旋转,从而将所述原料打浆。
另外,第二方案记载的精制机在第一方案记载的精制机中,转子打浆部具有第一旋转刃及第二旋转刃,该第一旋转刃设置于转子的端面的外周,该第二旋转刃设置于所述转子的端面且所述第一旋转刃的内侧,定子打浆部是隔开狭缝而配置于第一环状体的端部的固定刃,所述定子打浆部的固定刃位于所述第一旋转刃与所述第二旋转刃之间,第二环状体位于第一环状体的外侧,所述第二环状体具有将由所述定子打浆部与所述转子打浆部打浆后的原料排出的狭缝。
另外,第三方案记载的精制机在第一方案记载的精制机中,转子打浆部是呈放射状地设置于转子的端部的旋转刃,定子打浆部是呈放射状地设置于第一环状体的端部的固定刃,该固定刃与所述旋转刃对置,环状体位于所述旋转刃及所述固定刃的外侧,所述环状体具有将由所述定子打浆部与所述转子打浆部打浆后的原料排出的狭缝。
另外,第四方案记载的精制机在第一方案记载的精制机中,转子打浆部在转子的端面设置有将所述原料取入至所述转子打浆部的内部的原料供给口,在所述转子的侧面隔开狭缝而设置有旋转刃,定子打浆部是在圆筒形状体的侧面隔开狭缝而配置的固定刃。
另外,第五方案记载的精制机在第一方案记载的精制机中,旋转轴由磁轴承支承,马达的转速为4000rpm以上。
发明效果
根据第一方案记载的精制机,即使原料例如纤维较短、绵软,也能够不进行定子打浆部与转子打浆部之间的间隙的调整,而可变地控制转子打浆部的马达的旋转来对应原料。
另外,根据第二方案记载的精制机,即使原料例如纤维较短、绵软,也能够不进行定子打浆部与转子打浆部之间的间隙的调整,而利用马达控制部可变地控制所述转子打浆部的马达的旋转来将原料打浆,定子打浆部的固定刃位于第一旋转刃与第二旋转刃之间,因此能够增大原料的打浆效果。
另外,根据第三方案记载的精制机,即使原料例如纤维较短、绵软,也能够不进行定子打浆部与转子打浆部之间的间隙的调整,而利用马达控制部可变地控制所述转子打浆部的马达的旋转来将原料打浆。
另外,根据第四方案记载的精制机,即使原料例如纤维较短、绵软,也能够不进行定子打浆部与转子打浆部之间的间隙的调整,而利用马达控制部可变地控制所述转子打浆部的马达的旋转来将原料打浆,原料除了被直接引导至所述定子打浆部与所述转子打浆部之间的间隙以外,还从所述转子打浆部的原料供给口被引导至所述定子打浆部与所述转子打浆部之间的间隙,与此相应地能够增大原料的打浆效果。
附图说明
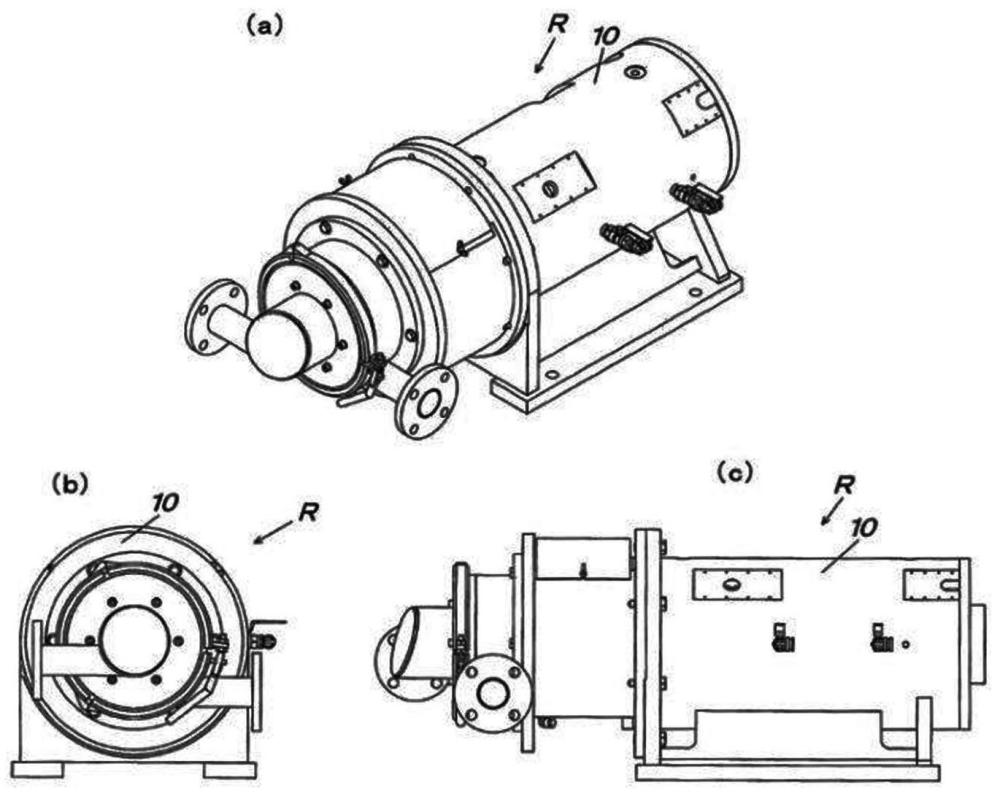
图1的(a)是本发明的一个实施例的精制机的概要立体图,图1的(b)是图1的(a)的概要主视图,图1的(c)是图1的(b)的概要右侧视图。
图2是图1的(a)的概要剖视图。
图3的(a)是图1的精制机的主要部分的概要主视图,图3的(b)是图3的(a)的A-A线概要剖视图,图3的(c)是将图3的(a)分解示出的概要分解立体图。
图4是表示与图3的实施例不同的另一实施例的精制机的图,图4的(a)是概要主视图,图4的(b)是图4的(a)的A-A线概要剖视图,图4的(c)是将图4的(a)分解示出的概要分解立体图。
图5是表示图4的原料流动的图,图5的(a)是表示图4的(b)中的原料流动的概要剖视图,图5的(b)是从斜向观察图5的(a)时的概要立体图。
图6是表示与图4的实施例不同的另一实施例的精制机的图,图6的(a)是概要主视图,图6的(b)是图6的(a)的A-A线概要剖视图,图6的(c)是将图6的(a)分解示出的概要分解立体图,图6的(d)是从不同方向观察图6的(c)时的概要分解立体图。
图7是表示与图6的实施例不同的另一实施例的精制机的图,图7的(a)是概要主视图,图7的(b)是图7的(a)的A-A线概要剖视图,图7的(c)是将图7的(a)分解示出的概要分解立体图,图7的(d)是从不同方向观察图7的(c)时的概要分解立体图。
具体实施方式
参照附图对本发明的一个实施例的精制机进行说明。
在图1中,R为精制机,精制机R将原料(原料例如为纤维素)供给至定子打浆部1与转子打浆部2之间,且将原料打浆(打浆是例如将纤维素机械地打浆成纳米尺寸,使其成为纤维素纳米纤维)。
在主体10内设置有旋转轴3。在该旋转轴3上利用安装构件60而安装有转子打浆部2。
4是驱动旋转轴3的马达(马达例如为主轴马达),马达4的旋转由马达控制部5控制。马达4的高旋转区域例如为4000rpm以上,优选为4000rpm~60000rpm的范围,该较宽的可变区域由马达控制部5控制。
6是通过磁悬浮来支承旋转轴3的磁轴承(径向磁轴承),7是通过磁悬浮来支承旋转轴3的磁轴承(轴向径向磁轴承),这些磁轴承(径向磁轴承)6、磁轴承(轴向径向磁轴承)7被磁轴承控制部8控制为通过电磁力在旋转轴3与磁轴承6、7之间形成间隙,以使高速旋转的旋转轴3不与磁轴承6、7接触。
而且,上述定子打浆部1与转子打浆部2之间的间隙t(参照图2)为不可变的恒定尺寸,不进行定子打浆部1与转子打浆部2之间的间隙t的调整,而可变地控制转子打浆部2的马达4的旋转来将原料打浆。
即,在马达4的旋转中,在原料的打浆不充分的情况下,利用马达控制部5使马达4的旋转更高速化,从而将原料打浆。
需要说明的是,例如如图3所示,转子打浆部2为圆筒形状体,在该圆筒形状体的侧面设置有旋转刃21,另外,定子打浆部1为圆筒形状体,是隔开狭缝S1而配置在该圆筒形状体的侧面的固定刃11,不进行定子打浆部1与转子打浆部2之间的间隙的调整,而可变地控制转子打浆部2的马达4的旋转来将原料打浆。
因此,从原料入口20供给的原料在定子打浆部1与转子打浆部2之间被打浆,被打浆的原料从原料出口30向主体10外排出。
根据该精制机R,即使原料例如纤维较短、绵软,也能够不进行定子打浆部1与转子打浆部2之间的间隙t的调整,而利用马达控制部5高速地控制转子打浆部2的马达4的旋转,从而与纤维较短、绵软的原料对应地进行打浆。
本发明的精制机R的定子打浆部1与转子打浆部2并不限定于上述图1至图3的精制机R的定子打浆部1与转子打浆部2,也可以是图4及图5记载的打浆部。
即,图4及图5记载的精制机R也与上述实施例的精制机R同样地将原料(原料例如是纤维素)供给至定子打浆部1与转子打浆部2之间,且将原料打浆(打浆是例如将纤维素机械地打浆成纳米尺寸,使其成为纤维素纳米纤维),本实施例的精制机R将图2记载的定子打浆部1与转子打浆部2替换成图4及图5记载的定子打浆部1与转子打浆部2,从而构成精制机R。
精制机R具备:旋转轴3、安装于该旋转轴3的转子打浆部2、驱动旋转轴3的马达4、以及控制该马达4的转速的马达控制部5。
定子打浆部1与转子打浆部2之间的间隙t是不可变的恒定尺寸,能够不进行定子打浆部1与转子打浆部2之间的间隙的调整,而可变地控制转子打浆部2的马达4的转速,从而与纤维较短、绵软的原料对应。
如图5所示,转子打浆部2为圆筒形状体,在该圆筒形状体的端面设置有将原料取入至转子打浆部2的内部的原料供给口22,在所述圆筒形状体的侧面设置有旋转刃21,定子打浆部1为圆筒形状体,是隔开狭缝S2而配置于该圆筒形状体的侧面的固定刃(图4的(c))。
图4及图5记载的精制机R,即使原料例如纤维较短、绵软,也能够不进行定子打浆部1与转子打浆部2之间的间隙的调整,而利用马达控制部5来与图1~图3记载的精制机R同样高速地控制转子打浆部2的马达4的旋转,从而与纤维较短、绵软的原料对应来将原料打浆,这是毋庸置疑的,原料除了被直接引导至定子打浆部1与转子打浆部2之间的间隙以外,还从转子打浆部2的原料供给口22被引导至定子打浆部1与转子打浆部2之间的间隙,与此相应地能够增大原料的打浆效果。
本发明的精制机R的定子打浆部与转子打浆部并不限定于上述图1至图5的精制机R的定子打浆部1与转子打浆部2,也可以是图6记载的定子打浆部1与转子打浆部2。
即,图6记载的精制机R也与上述实施例的精制机R同样地将原料(原料例如为纤维素)供给至定子打浆部1与转子打浆部2之间,且将原料打浆(打浆是例如将纤维素机械地打浆成纳米尺寸,使其成为纤维素纳米纤维),本实施例的精制机R是将图2记载的定子打浆部1与转子打浆部2替换成图6记载的定子打浆部1与转子打浆部2,从而构成精制机R。
精制机R具备:旋转轴3、安装于该旋转轴3的转子打浆部2、驱动旋转轴3的马达4、以及控制该马达4的旋转的马达控制部5。
定子打浆部1与转子打浆部2之间的间隙t是不可变的恒定尺寸,能够不进行定子打浆部1与转子打浆部2之间的间隙的调整,而可变地控制转子打浆部2的马达4的旋转,从而与纤维较短、绵软的原料对应。
转子打浆部2是呈放射状地设置于转子的端部的旋转刃21’,定子打浆部1是呈放射状地设置于第一环状体的端部的固定刃11’,该固定刃11’与旋转刃21’对置。
使具有将由定子打浆部1与转子打浆部2打浆后的原料排出的狭缝S3的环状体40位于旋转刃21’及固定刃11’的外侧,可变地控制转子打浆部2的马达4的旋转来将原料打浆。
根据该精制机R,即使原料例如纤维较短、绵软,也能够不进行定子打浆部1与转子打浆部2之间的间隙的调整,而利用马达控制部5来与图1~图3记载的精制机R同样可变地控制转子打浆部2的马达4的旋转来将原料打浆。
本发明的精制机R的定子打浆部与转子打浆部并不限定于上述图1至图6的精制机R的定子打浆部1与转子打浆部2,也可以是图7记载的定子打浆部1与转子打浆部2。
即,图7记载的精制机R也与上述实施例的精制机R同样地将原料(原料例如为纤维素)供给至定子打浆部1与转子打浆部2之间,且将原料打浆(打浆是例如将纤维素机械性地打浆成纳米尺寸,而形成纤维素纳米纤维),本实施例的精制机R是将图2记载的定子打浆部1与转子打浆部2替换成图7记载的定子打浆部1与转子打浆部2,从而构成精制机R。
精制机R具备:旋转轴3、安装于该旋转轴3的转子打浆部2、驱动旋转轴3的马达4、以及控制该马达4的转速的马达控制部5。
定子打浆部1与转子打浆部2之间的间隙t是不可变的恒定尺寸,能够不进行定子打浆部1与转子打浆部2之间的间隙的调整,而可变地控制转子打浆部2的马达4的旋转,从而与纤维较短、绵软的原料对应。
转子打浆部2具有设置于转子的端面的外周的第一旋转刃21、以及呈环状地设置于所述转子的端面且第一旋转刃21的内侧的第二旋转刃23,第一旋转刃21、第二旋转刃23设置于转子打浆部主体2A。
定子打浆部1是隔开狭缝S2而配置于第一环状体的端部的固定刃11,该固定刃11位于第一旋转刃21与第二旋转刃23之间。另外,使具有将由定子打浆部1与转子打浆部2打浆后的原料排出的狭缝S4的第二环状体50位于所述第一环状体的外侧。
根据该精制机R,即使原料例如纤维较短、绵软,也能够不进行定子打浆部1与转子打浆部2之间的间隙的调整,而利用马达控制部5来与图1~图3记载的精制机R同样可变地控制转子打浆部2的马达4的旋转来将原料打浆,定子打浆部1的固定刃11位于第一旋转刃21与第二旋转刃23之间,因此能够增大原料的打浆效果。
需要说明的是,图4、图5、图6、图7所示的60与图2、图3的记载同样地是将转子打浆部2安装于旋转轴3的安装构件。
- 有机溶剂的精制方法和有机溶剂的精制装置
- 精制机的打浆方法及精制机