一种车辆通信方法及通信系统
文献发布时间:2023-06-19 09:24:30
技术领域
本申请涉及车辆的通信控制技术领域,特别的,涉及一种车辆内部各ECU单元与外部客户端通信的方法及系统,可以适用于车辆ECU的诊断和升级。
背景技术
传统原始设备生产商运营模式对车辆进行诊断时,需要将车辆召回至售后维修服务中心,仅可通过连接诊断仪的方式获取车内信息或升级车内电子控制器单元(ElectronicControlUnit,ECU)。传统的车辆诊断方式,除了用户体验不好,也降低了维修人员的工作效率。
通过远程信息处理器(TelematicsBox,T-BOX)进行远程诊断,相比传统的诊断方式,虽然可以提高诊断效率,实时获取车辆状态和故障信息。但仅使用T-BOX进行诊断时,又不能满足车辆在工厂下线或售后过检时通过诊断仪进行车辆诊断的需要。
发明内容
本申请的目的是提供一种车辆通信方法及通信系统,该通信方法通过使诊断仪和T-Box远程两相结合满足了不同场景下的车辆诊断通信的不同需要。
第一方面,本申请实施例提供了一种车辆通信方法,包括:
客户端向车辆内某一目标ECU发起通信请求;
车辆的中央网关与该客户端建立连接,并通过预设路由表识别出所述目标ECU的通信路径;
中央网关将所述通信请求传输到所述通信路径中与该中央网关连接的第一级控制器;
如果所述第一级控制器不是所述目标ECU,则其通过预设路由表识别出所述目标ECU的通信路径,并将所述通信请求传输到所述通信路径中位于该第一级控制器下一级的第二级控制器,以此类推,直到某个控制器是所述目标ECU;
如果传输到的某个控制器是所述目标ECU,则该控制器响应所述通信请求,将通信数据沿所述目标ECU的通信路径返回到所述客户端。
一些实施例中,所述中央网关采用Ethernet总线通信方式进行通信;所述控制器采用Ethernet总线通信方式、CAN总线通信方式或LIN总线通信方式进行通信。
一些实施例中,所述中央网关根据原网段和目标网段的不同路由方式,分别实现DoIP到DoIP相互路由、CAN到CAN相互路由或DoIP到CAN相互路由;所述控制器实现DoIP到CAN相互路由、或CAN到LIN相互路由。
一些实施例中,所述中央网关和控制器分别存储有路由表,可通过所述路由表中的原节点和目标节点识别通信请求的发送方和接收方,进而识别该接收方的通信路径。
一些实施例中,所述通信请求是车辆ECU诊断请求或升级请求,所述客户端是诊断仪或T-Box。
一些实施例中,所述诊断仪向车辆内某一目标ECU发起诊断请求,以获取该目标ECU的诊断信息,用于车辆状态诊断;或所述诊断仪向车辆内某一目标ECU发起升级请求,对该目标ECU进行升级。
一些实施例中,所述T-Box以无线方式向车辆内某一目标ECU远程发起诊断请求,以获取该目标ECU的诊断信息,用于车辆状态诊断;或所述T-Box以无线方式向车辆内某一目标ECU发起升级请求,对该目标ECU进行升级。
一些实施例中,所述方法还包括所述中央网关根据某一个EthernetTx接口的激活状态来使能或禁用其他各个Ethernet接口的通信路径。
一些实施例中,所述方法还包括所述中央网关检测与诊断仪对应的EthernetTx接口是否处于激活状态;如果所述EthernetTx接口处于激活状态,则通过诊断仪进行通信请求,并禁止其他Ethernet接口的通信请求;如果所述EthernetTx接口未处于激活状态,则使能其他Ethernet接口的通信请求,通过T-Box与所述使能的Ethernet接口进行通信请求。
一些实施例中,所述方法还包括所述诊断仪向车辆内某一目标ECU发起诊断请求时,其通过EthernetTx和/或CAN通信接口进行通信请求。
第二方面,本申请实施例提供了一种车辆通信系统,用于响应外部客户端的通信请求,以实现客户端与车辆内目标ECU的通信,该系统包括:
中央网关,其采用Ethernet总线通信与外部客户端建立连接,通过其中的路由表识别所述目标ECU的通信路径,并将所述通信请求传输到所述通信路径中与该中央网关连接的第一级控制器;
一个或多个第一级控制器,其通过Ethernet总线或CAN通信与所述中央网关连接,其中所述接收到通信请求的第一级控制器通过其中的路由表识别所述目标ECU及其通信路径;其中,
如果该第一级控制器是所述目标ECU,则该控制器响应所述通信请求,将通信数据沿所述目标ECU的通信路径返回到所述客户端;
如果该第一级控制器不是所述目标ECU,则将所述通信请求传输到所述通信路径中位于该第一级控制器下一级的第二级控制器,以此类推,直到某个控制器是所述目标ECU。
一些实施例中,所述系统还包括:
一个或多个第二级控制器,其通过CAN总线或LIN总线与相应的所述第一级控制器连接,其中所述接收到通信请求的第二级控制器通过其中的路由表识别所述目标ECU及其通信路径;其中,
如果该第二级控制器是所述目标ECU,则该控制器响应所述通信请求,将通信数据沿所述目标ECU的通信路径返回到所述客户端;
如果该第二级控制器不是所述目标ECU,则将所述通信请求传输到所述通信路径中位于该第二级控制器下一级的第三级控制器,以此类推,直到某个控制器是所述目标ECU。
一些实施例中,其中所述中央网关根据原网段和目标网段的不同路由方式,分别实现DoIP到DoIP相互路由、CAN到CAN相互路由或DoIP到CAN相互路由;所述控制器实现DoIP到CAN相互路由、或CAN到LIN相互路由。
一些实施例中,其中所述中央网关和控制器分别存储有路由表,可通过所述路由表中的原节点和目标节点识别通信请求的发送方和接收方,进而识别该接收方的通信路径。
一些实施例中,其中所述客户端是诊断仪或T-Box,所述通信请求是车辆ECU诊断请求或升级请求。
一些实施例中,其中所述中央网关响应所述诊断仪向车辆内某一目标ECU发起的诊断请求,以获取该目标ECU的诊断信息,用于车辆状态诊断;或所述中央网关响应所述诊断仪向车辆内某一目标ECU发起的升级请求,对该目标ECU进行升级。
一些实施例中,其中所述中央网关响应所述T-Box以无线方式向车辆内某一目标ECU远程发起的诊断请求,以获取该目标ECU的诊断信息,用于车辆状态诊断;或所述中央网关响应所述T-Box以无线方式向车辆内某一目标ECU发起的升级请求,对该目标ECU进行升级。
一些实施例中,其中所述中央网关根据其某一个EthernetTx接口的激活状态来使能或禁用其他各个Ethernet接口的通信路径。
一些实施例中,其中所述中央网关检测与诊断仪对应的EthernetTx接口是否处于激活状态;如果所述EthernetTx接口处于激活状态,则通过诊断仪进行通信请求,并禁止其他Ethernet接口的通信请求;如果所述EthernetTx接口未处于激活状态,则使能其他Ethernet接口的通信请求,通过T-Box与所述使能的Ethernet接口进行通信请求。
一些实施例中,其中所述诊断仪向车辆内某一目标ECU发起诊断请求时,其通过EthernetTx和/或CAN通信接口进行通信请求。
第三方面,本申请实施例提供了一种可读存储介质,所述可读存储介质上存储有计算机执行指令,当所述计算机执行指令被处理器执行时,实现第一方面所述的方法。
第四方面,本申请实施例提供了一种车辆,其特征在于,所述车辆采用第一方面所述的通信方法实现与外部客户端的通信。
第五方面,一种车辆,所述车辆包括第二方面所述的车辆通信系统。
本申请实施例的有益效果通过本申请实施例的车辆通信方法使诊断仪和T-Box两相结合满足了车辆诊断通信在不同场景下的不同需要,既改善用户体验、提高诊断效率,又使车辆下线和车辆过检时的传统诊断需求也能得到满足。
附图说明
图1是本申请实施例的方法流程图;
图2是本申请实施例系统结构网络拓扑图;
图3是图2实施例中部分系统结构网络拓扑图。
具体实施方式
为使本申请的目的、技术方案和优点更加清楚明了,下面结合具体实施方式并参照附图,对本申请进一步详细说明。应该理解,这些描述只是示例性的,而并非要限制本申请的范围。此外,在以下说明中,省略了对公知结构和技术的描述,以避免不必要地混淆本申请的概念。
在本申请的描述中,需要说明的是,术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性。
此外,下面所描述的本申请不同实施方式中所涉及的技术特征只要彼此之间未构成冲突就可以相互结合。
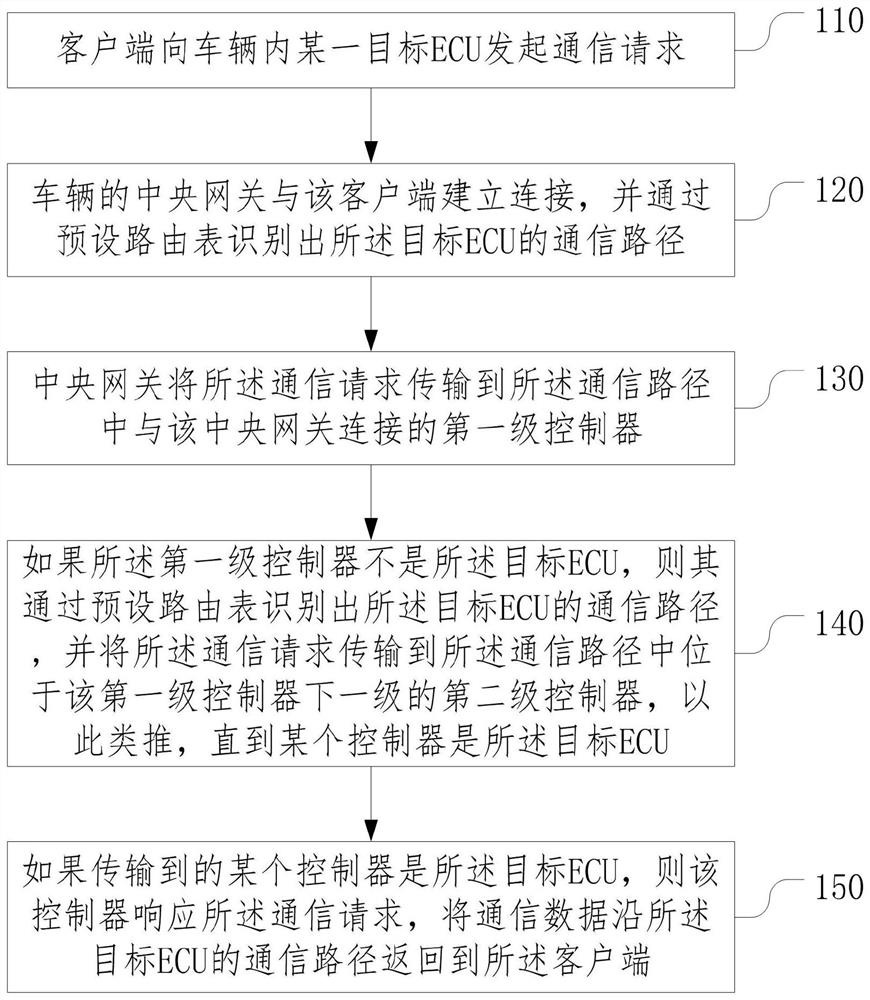
图1是本申请实施例的方法流程图。
如图1所示,一种车辆通信方法,包括:
步骤110:客户端向车辆内某一目标ECU发起通信请求。
该客户端可以是通过T-Box与车辆远程通信连接的远程客户端,也可以是与车辆直接连接的诊断仪。而相对于客户端目标ECU则相当于服务器的角色,即实施例中客户端与ECU均是通过客户端/服务器构架实现通信的。
步骤120:车辆的中央网关与该客户端建立连接,并通过预设路由表识别出所述目标ECU的通信路径。
一些实施例中,中央网关和控制器分别存储有路由表,可通过所述路由表中的原节点和目标节点识别通信请求的发送方和接收方,进而识别该接收方的通信路径。
步骤130:中央网关将所述通信请求传输到所述通信路径中与该中央网关连接的第一级控制器;
步骤140:如果所述第一级控制器不是所述目标ECU,则其通过预设路由表识别出所述目标ECU的通信路径,并将所述通信请求传输到所述通信路径中位于该第一级控制器下一级的第二级控制器,以此类推,直到某个控制器是所述目标ECU;
步骤150:如果传输到的某个控制器是所述目标ECU,则该控制器响应所述通信请求,将通信数据沿所述目标ECU的通信路径返回到所述客户端。
一些实施例中,所述中央网关采用Ethernet总线通信方式进行通信;所述控制器采用Ethernet总线通信方式、CAN总线通信方式或LIN总线通信方式进行通信。
一些实施例中,所述中央网关根据原网段和目标网段的不同路由方式,分别实现DoIP到DoIP相互路由、CAN到CAN相互路由或DoIP到CAN相互路由;所述控制器实现DoIP到CAN相互路由、或CAN到LIN相互路由。
一些实施例中,所述中央网关和控制器分别存储有路由表,可通过所述路由表中的原节点和目标节点识别通信请求的发送方和接收方,进而识别该接收方的通信路径。
一些实施例中,所述通信请求是车辆ECU诊断请求或升级请求,所述客户端是诊断仪或T-Box。
一些实施例中,所述诊断仪向车辆内某一目标ECU发起诊断请求,以获取该目标ECU的诊断信息,用于车辆状态诊断;或所述诊断仪向车辆内某一目标ECU发起升级请求,对该目标ECU进行升级。
一些实施例中,所述T-Box以无线方式向车辆内某一目标ECU远程发起诊断请求,以获取该目标ECU的诊断信息,用于车辆状态诊断;或所述T-Box以无线方式向车辆内某一目标ECU发起升级请求,对该目标ECU进行升级。
一些实施例中,所述方法还包括所述中央网关根据某一个EthernetTx接口的激活状态来使能或禁用其他各个Ethernet接口的通信路径。
一些实施例中,所述方法还包括所述中央网关检测与诊断仪对应的EthernetTx接口是否处于激活状态;如果所述EthernetTx接口处于激活状态,则通过诊断仪进行通信请求,并禁止其他Ethernet接口的通信请求;如果所述EthernetTx接口未处于激活状态,则使能其他Ethernet接口的通信请求,通过T-Box与所述使能的Ethernet接口进行通信请求。
一些实施例中,所述方法还包括所述诊断仪向车辆内某一目标ECU发起诊断请求时,其通过EthernetTx和/或CAN通信接口进行通信请求。
图2是是本申请实施例系统结构网络拓扑图。
如图2所示,一种车辆通信系统,用于响应外部客户端的通信请求,以实现客户端与车辆内目标ECU的通信,该系统包括:
中央网关,其采用Ethernet总线通信与外部客户端建立连接,通过其中的路由表识别所述目标ECU的通信路径,并将所述通信请求传输到所述通信路径中与该中央网关连接的第一级控制器;
一个或多个第一级控制器,其通过Ethernet总线或CAN通信与所述中央网关连接,其中所述接收到通信请求的第一级控制器通过其中的路由表识别所述目标ECU及其通信路径;其中,
如果该第一级控制器是所述目标ECU,则该控制器响应所述通信请求,将通信数据沿所述目标ECU的通信路径返回到所述客户端;
如果该第一级控制器不是所述目标ECU,则将所述通信请求传输到所述通信路径中位于该第一级控制器下一级的第二级控制器,以此类推,直到某个控制器是所述目标ECU。
如图2所示,中央网关也就是设置于车内的路由交换机,根据存储在中央网关或ECU中的路由表使不同路径的信息能够按预定的路由方式准确传输。
如图2所示,一些实施例中,所述系统还包括一个或多个第二级控制器,其通过CAN总线或LIN总线与相应的所述第一级控制器连接,其中所述接收到通信请求的第二级控制器通过其中的路由表识别所述目标ECU及其通信路径;其中,如果该第二级控制器是所述目标ECU,则该控制器响应所述通信请求,将通信数据沿所述目标ECU的通信路径返回到所述客户端;如果该第二级控制器不是所述目标ECU,则将所述通信请求传输到所述通信路径中位于该第二级控制器下一级的第三级控制器,以此类推,直到某个控制器是所述目标ECU。
如图2所示,一些实施例中,所述中央网关根据原网段和目标网段的不同路由方式,分别实现DoIP到DoIP相互路由、CAN到CAN相互路由或DoIP到CAN相互路由;所述控制器实现DoIP到CAN相互路由、或CAN到LIN相互路由。
如图2所示,一些实施例中,所述中央网关和控制器分别存储有路由表,可通过所述路由表中的原节点和目标节点识别通信请求的发送方和接收方,进而识别该接收方的通信路径。
如图2所示,一些实施例中,所述客户端是诊断仪或T-Box,所述通信请求是车辆ECU诊断请求或升级请求。
如图2所示,一些实施例中,所述中央网关响应所述诊断仪向车辆内某一目标ECU发起的诊断请求,以获取该目标ECU的诊断信息,用于车辆状态诊断;或所述中央网关响应所述诊断仪向车辆内某一目标ECU发起的升级请求,对该目标ECU进行升级。
如图2所示,一些实施例中,所述中央网关响应所述T-Box以无线方式向车辆内某一目标ECU远程发起的诊断请求,以获取该目标ECU的诊断信息,用于车辆状态诊断;或所述中央网关响应所述T-Box以无线方式向车辆内某一目标ECU发起的升级请求,对该目标ECU进行升级。
如图2所示,一些实施例中,所述中央网关根据其某一个EthernetTx接口的激活状态来使能或禁用其他各个Ethernet接口的通信路径。
如图2所示,一些实施例中,所述中央网关检测与诊断仪对应的EthernetTx接口是否处于激活状态;如果所述EthernetTx接口处于激活状态,则通过诊断仪进行通信请求,并禁止其他Ethernet接口的通信请求;如果所述EthernetTx接口未处于激活状态,则使能其他Ethernet接口的通信请求,通过T-Box与所述使能的Ethernet接口进行通信请求。
如图2所示,一些实施例中,所述诊断仪向车辆内某一目标ECU发起诊断请求时,其通过EthernetTx和/或CAN通信接口进行通信请求。
参见图2,一些实施例中,所述作为中间节点的ECU包括域控制器和中间控制器。如图2所示,该域控制器包括域控制器1和域控制器2,中间控制器包括控制器4。其中诊断路由表就是存储在该域控制器1、域控制器2和控制器4中。
一些实施例中,所述中央网关的原网段和目标网段之间的路由方式包括DoIP到DoIP路由、CAN到CAN路由和DoIP与CAN相互路由。参见图2,比如在ECU包括多种节点,如包括多个域控制器或中间控制器的情况下,不同节点间就需要采用不同的路由方式。在中央网关就具体体现为在原网段和目标网段之间存在多种路由方式。比如,中央网关与域控制器1或域控制器2之间的路由为DoIP到DoIP路由,中央网关与控制器8、控制器9和控制器10之间的路由为CAN到CAN路由,而中央网关与控制器1、控制器2、控制器3和控制器4之间的路由为DoIP与CAN相互路由。
参见图2,一些实施例中,所述域控制器支持DoIP和CAN相互路由,所述中间控制器支持CAN和LIN相互路由。比如,域控制器1和域控制器2支持其与中央网关间的DoIP和CAN相互路由,控制器的支持其与中央网关间的CAN和LIN相互路由。
图3是图2实施例中经第一接口的部分系统结构网络拓扑图。
如图3所示,第一接口为以太网T1接口,T-Box经由中央网关的以太网T1接口与作为域控制器1的ECU相连接,中央网关与作为域控制器1的ECU之间的路由方式可支持DoIP到DoIP路由、CAN到CAN路由或DoIP与CAN相互路由;作为域控制器1的ECU与作为中间控制器4的相应的ECU之间的路由方式支持DoIP和/或DoCAN路由协议;作为中间控制器4的所述ECU与作为末端控制器5的所述ECU的路由方式支持DoCAN和/或LIN路由协议。
以T-Box对控制器5进行诊断为例,其诊断数据传输过程如下:
T-Box与中央网关建立连接,并通过以太网T1接口DoIP路由协议发送诊断请求给中央网关,中央网关通过诊断路由表识别此诊断数据的接收方是控制器5。
中央网关将诊断请求通过以太网T1DoIP协议传输到域控制器1,域控制器1通过诊断路由表识别此诊断数据的接收方是控制器5,域控制器1进行DoIP到CAN路由并将协议转换后的CAN报文发送到CAN2网段。
控制器4接收到诊断请求,并通过诊断路由表识别此诊断数据的接收方是控制器5,控制器4进行CAN到LIN的路由并将协议转换后的LIN报文发送到LIN网段。
控制器5在LIN网段接收到诊断请求报文后进行诊断数据响应,响应后的诊断数据按照上述路径返回到T-Box。
上述过程为远程客户端通过T-Box经第二诊断入口对ECU进行的诊断。而通过诊断仪经第一诊断入口对ECU进行诊断与上述方法一致,不同点仅为诊断仪是通过以太网TX接口或CAN接口与中央网关进行连接的。
在车辆诊断过程中,不同诊断路径使能条件不同,诊断仪与T-Box都可以对ECU进行诊断,且同一个ECU的诊断路径在该ECU到中央网关之间的都是相同的。因为目前ECU不支持同时收到多个诊断请求的功能,所以需要对不同路径的诊断进行上述使能设置与冲突处理。
一些实施例中,如图2所示,中央网关可识别不同路径的诊断通信请求,通过配置中央网关的以太网TX和以太网T1状态来使能诊断路径,具体过程为:
(1)当中央网关检测到以太网TX接口激活线未处于激活状态时,表明诊断仪无诊断通信使能需求,以太网T1诊断接口使能,此时可通过T-Box进行诊断通信请求。
(2)当中央网检查到以太网TX接口的激活线处于激活状态时,表明诊断仪已经与整车进行物理连接,诊断仪有诊断通信使能的需求,此时可通过诊断仪进行诊断通信请求。以太网T1口不支持诊断通信;
其中,在(2)条件下诊断仪与ECU为有线通信连接,此时诊断仪可通过以太网TX和CAN两种通信接口进行诊断通信请求,但诊断仪不能同时通过两种通信接口对同一个ECU进行诊断通信请求。
本申请实施例还提供了一种计算机可读存储介质,所述计算机可读存储介质上存储有计算机执行指令,当所述计算机执行指令被处理器执行时,实现上述方法实施例中任一项所述的方法。
本申请实施例还提供了一种车辆,所述车辆采用方法实施例中任一项所述的通信方法实现与外部客户端的通信。
本申请实施例还提供了一种车辆,所述车辆包括上述任一所述的车辆通信系统。
应当理解的是,本申请的上述具体实施方式仅仅用于示例性说明或解释本申请的原理,而不构成对本申请的限制。因此,在不偏离本申请的精神和范围的情况下所做的任何修改、等同替换、改进等,均应包含在本申请的保护范围之内。此外,本申请所附权利要求旨在涵盖落入所附权利要求范围和边界、或者这种范围和边界的等同形式内的全部变化和修改例。
- 车辆通信系统及基于车辆通信系统的通信方法
- 中继装置、车辆通信系统、车辆、通信方法及通信程序