一种车辆预警方法、装置、设备及存储介质
文献发布时间:2023-06-19 09:26:02
技术领域
本发明实施例涉及车辆技术领域,尤其涉及一种车辆预警方法、装置、设备及存储介质。
背景技术
现阶段自动驾驶车辆的感知系统还无法做到准确预测周围环境中行人和骑行者等的运动轨迹。因此,自动驾驶车辆在遇到过街行人、动物和骑行者等具有不可预测性的复杂对象时,往往需要向驾驶员发出预警,以提示驾驶员接管自动驾驶车辆,避免发生交通事故,保证本车辆的驾驶员与乘客以及车辆周围行人的安全。
现有技术中的预警方法通常是对行驶中的车辆的周围环境向驾驶员进行实时通报,当车辆的监测范围内出现障碍物及实时地警示驾驶员躲避障碍物。障碍物一般可认为是具有一定高度和宽度的物体,如近距离的行人,其他车辆等。然而,车辆在行驶道路上中往往会与行人、动物和非机动车辆等异常目标保持较近的距离,若车辆频繁预警会降低驾驶员和乘客的乘车体验。
发明内容
本发明实施例提供一种车辆预警方法、装置、设备及存储介质,以实现将车辆预警范围内出现的异常目标,根据异常目标类型进行不同方式的预警,提醒驾驶员接管车辆,以避免车辆频繁预警,从而保证车辆运行安全性的同时提高自动驾驶车辆的人机交互舒适性,提升驾驶员和乘客的乘车体验。
第一方面,本发明实施例提供了一种车辆预警方法,包括:
若检测到当前车辆的预警范围内存在异常目标,则获取所述异常目标信息,其中,所述异常目标信息包括异常目标的位置信息、异常目标的速度信息和/或异常目标的平面信息;
根据所述异常目标信息确定异常目标类型;
根据所述异常目标类型进行预警。
进一步的,根据所述异常目标类型进行预警,包括:
若所述异常目标类型为第一类型,则进行预警,其中,所述第一类型包括:目标车辆和/或红绿灯,所述目标车辆和当前车辆的行驶方向相反,且处于同一车道;
若所述异常目标类型为第二类型,则获取所述当前车辆的状态、所述异常目标进入所述预警范围的次数和所述异常目标进入所述预警范围的时间中的至少一种,其中,所述第二类型包括:行人、动物和非机动车中的至少一种;根据所述当前车辆的状态、所述异常目标进入所述预警范围的次数和所述异常目标进入所述预警范围的时间中的至少一种进行预警。
进一步的,根据所述当前车辆的状态、所述异常目标进入所述预警范围的次数和所述异常目标进入所述预警范围的时间中的至少一种进行预警,包括:
若所述当前车辆处于静止状态,且所述异常目标进入所述预警范围的次数大于次数阈值和/或所述异常目标进入所述预警范围的时间大于时间阈值,则进行预警;
若所述当前车辆处于运动状态,则进行预警,并控制所述当前车辆在所处车道内停车。
进一步的,当前车辆的预警范围包括:当前车辆所处车道、当前车辆所处车道左侧半个车道和当前车辆所处车道右侧半个车道。
进一步的,根据所述异常目标类型进行预警包括:
根据所述异常目标类型提醒驾驶员接管车辆。
第二方面,本发明实施例还提供了一种车辆预警装置,该装置包括:
获取模块,用于若检测到当前车辆的预警范围内存在异常目标,则获取所述异常目标信息,其中,所述异常目标信息包括异常目标的位置信息、异常目标的速度信息和/或异常目标的平面信息;
确定模块,用于根据所述异常目标信息确定异常目标类型;
预警模块,用于根据所述异常目标类型进行预警。
进一步的,所述预警模块,包括:
第一预警单元,用于若所述异常目标类型为第一类型,则进行预警,其中,所述第一类型包括:目标车辆和/或红绿灯,所述目标车辆和当前车辆的行驶方向相反,且处于同一车道;
第二预警单元,用于若所述异常目标类型为第二类型,则获取所述当前车辆的状态、所述异常目标进入所述预警范围的次数和所述异常目标进入所述预警范围的时间中的至少一种,其中,所述第二类型包括:行人、动物和非机动车中的至少一种;根据所述当前车辆的状态、所述异常目标进入所述预警范围的次数和所述异常目标进入所述预警范围的时间中的至少一种进行预警。
进一步的,所述第二预警单元,具体用于:
若所述当前车辆处于静止状态,且所述异常目标进入所述预警范围的次数大于次数阈值和/或所述异常目标进入所述预警范围的时间大于时间阈值,则进行预警;
若所述当前车辆处于运动状态,则进行预警,并控制所述当前车辆在所处车道内停车。
进一步的,所述获取模块,具体用于:
确定当前车辆的预警范围包括:当前车辆所处车道、当前车辆所处车道左侧半个车道和当前车辆所处车道右侧半个车道。
进一步的,所述预警模块,具体用于:
根据所述异常目标类型提醒驾驶员接管车辆。
第三方面,本发明实施例还提供了一种计算机设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如本发明实施例中任一所述的车辆预警方法。
第四方面,本发明实施例还提供了一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现如本发明实施例中任一所述的车辆预警方法。
本发明实施例通过检测当前车辆的预警范围内是否存在异常目标,若检测到当前车辆的预警范围内存在异常目标,则获取所述异常目标信息,其中,所述异常目标信息包括异常目标的位置信息、异常目标的速度信息和/或异常目标的平面信息;根据所述异常目标信息确定异常目标类型;根据所述异常目标类型进行预警,实现将车辆预警范围内出现的异常目标的类型进行预警提醒驾驶员接管车辆,解决因车辆频繁预警而降低驾驶员乘车体验的问题,同时将预警和自动停车结合,解决因自动驾驶系统无法及时对预警范围内出现的异常目标进行处理而导致事故发生的问题,能够保证车辆运行安全性的同时提高自动驾驶车辆的人机交互舒适性,提升驾驶员和乘客的乘车体验。
附图说明
为了更清楚地说明本发明实施例的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本发明的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
图1是本发明实施例一中的一种车辆预警方法的流程图;
图2是本发明实施例二中的一种车辆预警方法的流程图;
图2a是本发明实施例二中的另一种车辆预警方法的流程图;
图3是本发明实施例三中的一种车辆预警装置的结构示意图;
图4是本发明实施例四中的一种计算机设备的结构示意图。
具体实施方式
下面结合附图和实施例对本发明作进一步的详细说明。可以理解的是,此处所描述的具体实施例仅仅用于解释本发明,而非对本发明的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与本发明相关的部分而非全部结构。
应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步定义和解释。同时,在本发明的描述中,术语“第一”、“第二”等仅用于区分描述,而不能理解为指示或暗示相对重要性。
实施例一
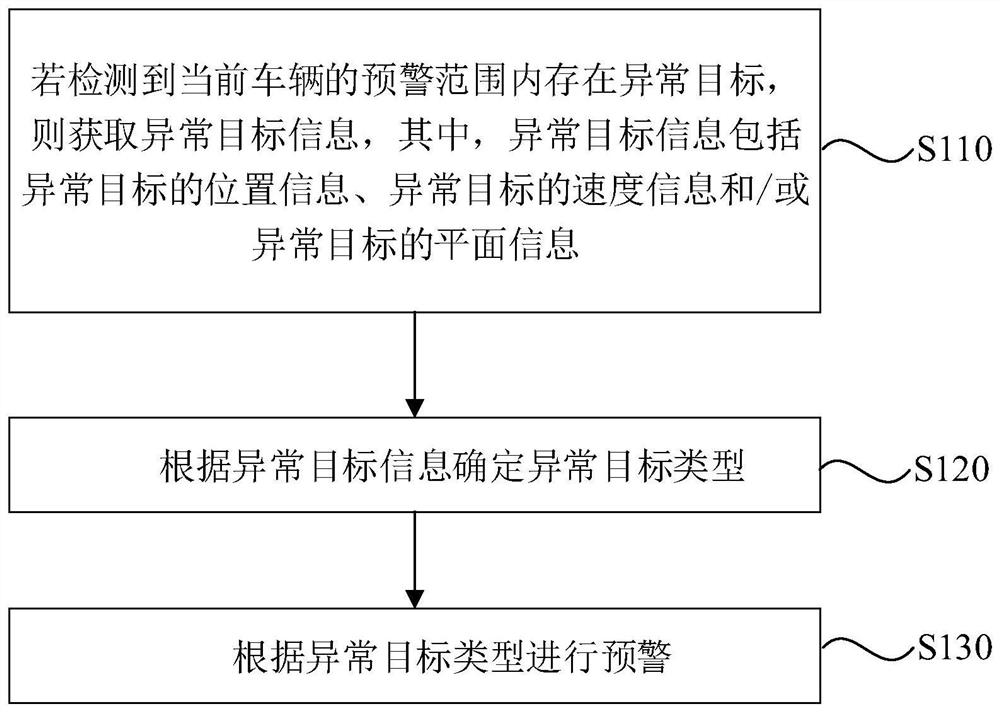
图1为本发明实施例一提供的一种车辆预警方法的流程图,本实施例可适用于车辆预警的情况,该方法可以由本发明实施例中的车辆预警装置来执行,该装置可采用软件和/或硬件的方式实现,如图1所示,该方法具体包括如下步骤:
S110,若检测到当前车辆的预警范围内存在异常目标,则获取所述异常目标信息,其中,所述异常目标信息包括异常目标的位置信息、异常目标的速度信息和/或异常目标的平面信息。
其中,异常目标是指道路上出现的且可能会影响当前车辆正常驾驶的物体,异常目标包括行人、动物、非机动车、目标车辆和红绿灯。其中,目标车辆是指与当前车辆的行驶方向相反,且处于同一车道的车辆。异常目标信息包括异常目标的位置信息、异常目标的速度信息和/或异常目标的平面信息,异常目标的位置信息是指通过车载传感器获取的异常目标相对于当前车辆的位置,异常目标的速度信息是指通过车载传感器获取的异常目标相对于当前车辆的速度,异常目标的平面信息是通过车载传感器获取的异常目标的形状和尺寸等平面结构信息。
其中,当前车辆的预警范围指的是当前车辆预设的预警范围,所述当前车辆的预警范围可以为当前车辆所在车道,可以为当前车辆所在车道和当前车辆所在车道的左侧半个车道,或者可以为当前车辆所在车道和当前车辆所在车道的右侧半个车道,也可以为当前车辆所处车道、当前车辆所处车道左侧半个车道和当前车辆所处车道右侧半个车道。
具体的,若检测到当前车辆的预警范围内存在异常目标,则获取所述异常目标信息,其中,所述异常目标信息包括异常目标的位置信息、异常目标的速度信息和/或异常目标的平面信息。获取所述异常目标信息的方式可以为通过摄像头获取当前车辆预警范围内异常目标的位置信息、异常目标的速度信息和/或异常目标的平面信息;可以为通过前置摄像头获取当前车辆预警范围内异常目标的位置信息和异常目标的速度信息,通过激光雷达传感器获取当前车辆预警范围内异常目标的平面信息;也可以为通过环视摄像头和超声波传感器获取当前车辆预警范围内异常目标的位置信息、异常目标的速度信息和/或异常目标的平面信息。本发明实施例对此不设限制。
S120,根据所述异常目标信息确定异常目标类型。
其中,异常目标类型包括但不限于第一类型和第二类型,第一类型可以包括目标车辆和/或红绿灯,也可以包括车辆所行驶的道路上出现的概率小于第一设定阈值的异常目标类型,还可以包括车辆所行驶的道路上影响车辆正常驾驶的概率小于第二设定阈值的异常目标类型,其中,第一设定阈值和第二设定阈值可以相同,也可以不同,若第一设定阈值和第二设定阈值不同,第一设定阈值可以大于第二设定阈值,也可以小于第二设定阈值,本发明实施例对此不进行限制。
其中,第二类型可以包括行人、动物和非机动车中的至少一种;也可以包括车辆所行驶的道路上出现的概率大于或者等于第一设定阈值的异常目标类型,还可以包括当前车辆所行驶的道路上影响当前车辆正常驾驶的概率大于或者等于第二设定阈值的异常目标类型,其中,第一设定阈值和第二设定阈值可以相同,也可以不同,若第一设定阈值和第二设定阈值不同,第一设定阈值可以大于第二设定阈值,也可以小于第二设定阈值,本发明实施例对此不进行限制。
其中,所述异常目标类型还可以包括第三类型和第四类型,异常目标类型可以根据用户的需求设置,也可以系统初始设置。异常目标分类的依据可以为当前车辆所行驶道路上异常目标出现的概率,也可以为当前车辆所行驶道路上异常目标可能会影响当前车辆正常驾驶的概率,本发明实施例对此不进行限制。
示例性的,若当前车辆所行驶道路为城市快速路,城市快速路上红绿灯和与当前车辆在同一车道内相向而行的目标车辆出现的概率小于第一设定阈值,则红绿灯和目标车辆为第一类型的异常目标;城市快速路上行人、动物和非机动车出现的概率大于或者等于第一设定阈值,则行人、动物和非机动车为第二类型的异常目标。
具体的,可以根据异常目标的位置信息、异常目标的速度信息和/或异常目标的平面信息,确定异常目标类型;或者可以根据异常目标的速度信息和异常目标的平面信息,确定异常目标类型;还可以根据异常目标的位置信息和异常目标的平面信息确定异常目标类型,也可以根据异常目标的位置信息、异常目标的速度信息、异常目标的平面信息和道路类型确定异常目标类型,或者可以为根据异常目标的平面信息和道路类型确定异常目标类型,还可以为根据异常目标的速度信息、异常目标的平面信息和道路类型确定异常目标类型,本发明实施例对此不进行限制。
示例性的,根据异常目标的平面信息和异常目标的位置信息,确定所述异常目标为红绿灯;根据异常目标的位置信息、异常目标的速度信息和异常目标的平面信息,确定所述异常目标为目标车辆;根据异常目标的速度信息和异常目标的平面信息,确定所述异常目标为行人、非机动车或者动物;根据异常目标的位置信息、异常目标的平面信息,且道路类型为城市道路,确定异常目标为红绿灯;根据异常目标的速度信息、异常目标的平面信息,且道路类型为县道,确定异常目标为行人。
示例性的,若根据异常目标的平面信息确定异常目标为行人,则确定异常目标类型为第二类型。若根据异常目标的平面信息确定异常目标为车辆,根据异常目标的位置信息确定异常目标为当前车辆所在车道内的车辆,根据异常目标的速度信息确定异常目标为当前车辆所在车道内与当前车辆行驶方向相反的车辆,即异常目标为当前车辆所在车道内的对向来车,则确定异常目标类型为第一类型。
S130,根据所述异常目标类型进行预警。
其中,预警是指当前车辆发出预警提醒驾驶员接管当前车辆。
具体的,根据所述异常目标类型进行预警的方式可以为根据异常目标类型发出预警信号,提醒驾驶员接管当前车辆;也可以为根据异常目标类型发出预警信号,提醒驾驶员接管当前车辆的同时,根据当前车辆的状态,控制当前车辆在所处车道内停车。预警的方式可以为预警指示灯闪烁;可以为发出蜂鸣声;也可以为根据异常目标类型预警指示灯以不同颜色或频率闪烁,或者发出不同蜂鸣声进行预警,本发明实施例对此不设限制。
本实施例的技术方案,通过检测当前车辆的预警范围内是否存在异常目标,若检测到当前车辆的预警范围内存在异常目标,则获取所述异常目标信息,确定异常目标类型,并根据所述异常目标类型进行预警,能够实现将车辆预警范围内出现的异常目标的类型进行预警提醒驾驶员接管车辆,解决因车辆频繁预警而降低驾驶员乘车体验的问题,同时将预警和自动停车结合,解决因自动驾驶系统无法及时对预警范围内出现的异常目标进行处理而导致事故发生的问题,能够保证车辆运行安全性的同时提高自动驾驶车辆的人机交互舒适性,提升驾驶员和乘客的乘车体验。
实施例二
图2为本发明实施例二中的一种车辆预警方法的流程图,本实施例以上述实施例为基础进行优化,在本实施例中,根据所述异常目标类型进行预警,包括:若所述异常目标类型为第一类型,则进行预警,其中,所述第一类型包括:目标车辆和/或红绿灯,所述目标车辆和当前车辆的行驶方向相反,且处于同一车道;若所述异常目标类型为第二类型,则获取所述当前车辆的状态、所述异常目标进入所述预警范围的次数和所述异常目标进入所述预警范围的时间中的至少一种,其中,所述第二类型包括:行人、动物和非机动车中的至少一种,根据所述当前车辆的状态、所述异常目标进入所述预警范围的次数和所述异常目标进入所述预警范围的时间中的至少一种进行预警。
如图2所示,本实施例的方法具体包括如下步骤:
S210,若检测到当前车辆的预警范围内存在异常目标,则获取所述异常目标信息,其中,所述异常目标信息包括异常目标的位置信息、异常目标的速度信息和/或异常目标的平面信息。
S220,根据所述异常目标信息确定异常目标类型。
S230,若所述异常目标类型为第一类型,则进行预警,其中,所述第一类型包括:目标车辆和/或红绿灯,所述目标车辆和当前车辆的行驶方向相反,且处于同一车道。
具体的,若进入当前车辆预警范围内的所述异常目标类型为第一类型,立即进行预警,提醒驾驶员接管车辆。
示例性的,若进入当前车辆预警范围内的异常目标为红绿灯,则确定所述异常目标类型为第一类型,立即进行预警,提醒驾驶员接管车辆,若驾驶员接管车辆,则当前车辆退出自动驾驶状态;若驾驶员在预设时间内未接管车辆,则当前车辆可以根据预设规划路径自动识别红绿灯状态自动控制车辆行驶。若进入当前车辆预警范围内的异常目标为目标车辆,所述异常目标类型为第一类型,立即进行预警,提醒驾驶员接管车辆,若驾驶员接管车辆,则当前车辆退出自动驾驶状态;若驾驶员在预设时间内未接管车辆,则当前车辆根据目标车辆信息减速或刹车。其中预设时间可以根据用户的需求设置,也可以根据车辆实际运行情况设置,本发明实施例对此不设限制。
S240,若所述异常目标类型为第二类型,则获取所述当前车辆的状态、所述异常目标进入所述预警范围的次数和所述异常目标进入所述预警范围的时间中的至少一种,其中,所述第二类型包括:行人、动物和非机动车中的至少一种,根据所述当前车辆的状态、所述异常目标进入所述预警范围的次数和所述异常目标进入所述预警范围的时间中的至少一种进行预警。
其中,所述当前车辆的状态是指当前车辆的运行状态,可以包括运动状态和静止状态。所述静止状态是指当前车辆启动且处于静止状态。
其中,所述异常目标进入所述预警范围的次数是指第二类型异常目标在预设时间内累计进入所述预警范围的次数。所述异常目标进入所述预警范围的时间是指单一异常目标进入所述预警范围内的持续时间。
具体的,进入当前车辆预警范围内的所述异常目标类型为第二类型,则获取所述当前车辆的状态、所述异常目标进入所述预警范围的次数和所述异常目标进入所述预警范围的时间中的至少一种,其中,所述第二类型包括:行人、动物和非机动车中的至少一种。根据所述当前车辆的状态、所述异常目标进入所述预警范围的次数和所述异常目标进入所述预警范围的时间中的至少一种进行预警,提醒驾驶员接管车辆,若驾驶员接管车辆,则当前车辆退出自动驾驶状态;若所述异常目标进入所述预警范围的次数达到预设次数或所述异常目标进入所述预警范围的时间达到预设时间,驾驶员未接管车辆,则根据当前车辆的状态,保持当前车辆的状态或者对当前车辆进行制动。
可选的,根据所述当前车辆的状态、所述异常目标进入所述预警范围的次数和所述异常目标进入所述预警范围的时间中的至少一种进行预警,包括:若所述当前车辆处于静止状态,且所述异常目标进入所述预警范围的次数大于次数阈值和/或所述异常目标进入所述预警范围的时间大于时间阈值,则进行预警;若所述当前车辆处于运动状态,则进行预警,并控制所述当前车辆在所处车道内停车。
其中,当前车辆的状态是指当前车辆的运行状态,包括运动状态和静止状态。次数阈值为预先设定的次数,可以根据用户的需求进行设定;时间阈值为预先设定的时间,可以根据用户的需求进行设定。
具体的,若所述当前车辆处于静止状态,且所述异常目标进入所述预警范围的次数大于次数阈值和/或所述异常目标进入所述预警范围的时间大于时间阈值,则进行预警;若驾驶员在预设时间内接管当前车辆,则退出当前车辆自动驾驶状态;若驾驶员在预设时间内未接管当前车辆,则保持当前车辆的自动驾驶状态。若所述当前车辆处于运动状态,所述异常目标进入所述预警范围内,则进行预警提醒驾驶员接管车辆,若驾驶员在预设时间内接管当前车辆,则当前车辆退出自动驾驶状态;驾驶员在预设时间内未接管当前车辆,则根据异常目标信息控制车辆在所处车道内停车。
示例性的,若所述当前车辆处于静止状态,所述异常目标进入所述预警范围的次数大于次数阈值,则进行预警,若驾驶员接管在预设时间内当前车辆,则当前车辆退出自动驾驶状态。若所述当前车辆处于运动状态,所述异常目标进入所述预警范围内,则进行预警提醒驾驶员接管当前车辆,若驾驶员在预设时间内未接管当前车辆,获取异常目标的位置信息和速度信息,控制当前车辆在所处车道内刹车进行减速或者制动。
可选的,当前车辆的预警范围可以包括:当前车辆所处车道、当前车辆所处车道左侧半个车道和当前车辆所处车道右侧半个车道。
具体的,所述当前车辆的预警范围可以包括当前车辆所在车道,可以为当前车辆所在车道和当前车辆所在车道的左侧半个车道,或者可以包括当前车辆所在车道和当前车辆所在车道的右侧半个车道,也可以包括当前车辆所处车道、当前车辆所处车道左侧半个车道和当前车辆所处车道右侧半个车道。当前车辆的预警范围可以由系统预先设定的,还可以根据用户的需求改变设置。
可选的,根据所述异常目标类型进行预警包括:根据所述异常目标类型提醒驾驶员接管车辆。具体的,根据所述异常目标类型进行预警,提醒驾驶员接管车辆。预警的方式可以为预警指示灯闪烁;可以为发出蜂鸣声;也可以为根据异常目标类型预警指示灯以不同颜色或频率闪烁,或者发出不同蜂鸣声进行预警,本发明实施例对此不设限制。
如图2a所示,本实施例的技术方案的具体步骤为:若检测到当前车辆的预警范围内存在异常目标,其中异常目标包括行人、动物、非机动车、目标车辆或红绿灯,则获取所述异常目标信息,包括异常目标的位置信息,异常目标的速度信息和/或异常目标的平面信息。若异常目标为目标车辆或者红绿灯,则进行预警提醒驾驶员接管车辆,若驾驶员在预设时间内接管车辆,则当前车辆退出自动驾驶状态,若驾驶员在预设时间内未接管车辆,则根据异常目标信息控制车辆自动驾驶。若异常目标不是目标车辆或者红绿灯,即异常目标为行人、动物或者非机动车,则获取当前车辆的状态,若当前车辆处于静止状态,则获取异常目标进入当前车辆的预警范围的次数和异常目标进入当前车辆的预警范围的时间中的至少一种,根据异常目标进入当前车辆的预警范围的次数大于次数阈值和/或异常目标进入当前车辆的预警范围的时间大于时间阈值中的至少一种,进行预警提醒驾驶员接管车辆,若驾驶员在预设时间内接管车辆,则当前车辆退出自动驾驶状态,若驾驶员在预设时间内未接管车辆,则保持当前车辆的静止状态。若当前车辆处于运动状态,则根据异常目标信息进行预警提醒驾驶员接管车辆,若驾驶员在预设时间内接管车辆,则当前车辆退出自动驾驶状态,若驾驶员在预设时间内未接管车辆,则控制当前车辆在本车道内停车,并退出自动驾驶状态。
本实施例的技术方案,通过检测当前车辆的预警范围内是否存在异常目标,若检测到当前车辆的预警范围内存在异常目标,则获取所述异常目标信息,确定异常目标类型,并根据所述异常目标类型进行预警,能够实现将车辆预警范围内出现的异常目标的类型进行预警提醒驾驶员接管车辆,解决因车辆频繁预警而降低驾驶员乘车体验的问题,同时将预警和自动停车结合,解决因自动驾驶系统无法及时对预警范围内出现的异常目标进行处理而导致事故发生的问题,能够保证车辆运行安全性的同时提高自动驾驶车辆的人机交互舒适性,提升驾驶员和乘客的乘车体验。
实施例三
图3为本发明实施例三提供的一种车辆预警装置的结构示意图。本实施例可适用于车辆预警的情况,该装置可采用软件和/或硬件的方式实现,该装置可集成在任何提供车辆预警的功能的设备中,如图3所示,所述车辆预警的装置具体包括:获取模块310、获取模块320和获取模块330。
其中,获取模块310,用于若检测到当前车辆的预警范围内存在异常目标,则获取所述异常目标信息,其中,所述异常目标信息包括异常目标的位置信息、异常目标的速度信息和/或异常目标的平面信息;
确定模块320,用于根据所述异常目标信息确定异常目标类型;
预警模块330,用于根据所述异常目标类型进行预警。
可选的,所述预警模块,包括:
第一预警单元,用于若所述异常目标类型为第一类型,则进行预警,其中,所述第一类型包括:目标车辆和/或红绿灯,所述目标车辆和当前车辆的行驶方向相反,且处于同一车道;
第二预警单元,用于若所述异常目标类型为第二类型,则获取所述当前车辆的状态、所述异常目标进入所述预警范围的次数和所述异常目标进入所述预警范围的时间中的至少一种,其中,所述第二类型包括:行人、动物和非机动车中的至少一种;
根据所述当前车辆的状态、所述异常目标进入所述预警范围的次数和所述异常目标进入所述预警范围的时间中的至少一种进行预警。
可选的,所述第二预警单元,具体用于:
若所述当前车辆处于静止状态,且所述异常目标进入所述预警范围的次数大于次数阈值和/或所述异常目标进入所述预警范围的时间大于时间阈值,则进行预警;
若所述当前车辆处于运动状态,则进行预警,并控制所述当前车辆在所处车道内停车。
可选的,所述获取模块,具体用于:
确定当前车辆的预警范围包括:当前车辆所处车道、当前车辆所处车道左侧半个车道和当前车辆所处车道右侧半个车道。
可选的,所述预警模块,具体用于:
根据所述异常目标类型提醒驾驶员接管车辆。
上述产品可执行本发明任意实施例所提供的方法,具备执行方法相应的功能模块和有益效果。
本实施例的技术方案,通过检测当前车辆的预警范围内是否存在异常目标,若检测当前车辆的预警范围内存在异常目标,则获取所述异常目标信息,确定异常目标类型,并根据所述异常目标类型进行预警,能够实现将车辆预警范围内出现的异常目标的类型进行预警提醒驾驶员接管车辆,解决因车辆频繁预警而降低驾驶员乘车体验的问题,同时将预警和自动停车结合,解决因自动驾驶系统无法及时对预警范围内出现的异常目标进行处理而导致事故发生的问题,能够保证车辆运行安全性的同时提高自动驾驶车辆的人机交互舒适性,提升驾驶员和乘客的乘车体验。
实施例四
图4为本发明实施例四中的一种计算机设备的结构示意图。图4示出了适于用来实现本发明实施方式的示例性计算机设备12的框图。图4显示的计算机设备12仅仅是一个示例,不应对本发明实施例的功能和使用范围带来任何限制。
如图4所示,计算机设备12以通用计算设备的形式表现。计算机设备12的组件可以包括但不限于:一个或者多个处理器或者处理单元16,系统存储器28,连接不同系统组件(包括系统存储器28和处理单元16)的总线18。
总线18表示几类总线结构中的一种或多种,包括存储器总线或者存储器控制器,外围总线,图形加速端口,处理器或者使用多种总线结构中的任意总线结构的局域总线。举例来说,这些体系结构包括但不限于工业标准体系结构(ISA)总线,微通道体系结构(MAC)总线,增强型ISA总线、视频电子标准协会(VESA)局域总线以及外围组件互连(PCI)总线。
计算机设备12典型地包括多种计算机系统可读介质。这些介质可以是任何能够被计算机设备12访问的可用介质,包括易失性和非易失性介质,可移动的和不可移动的介质。
系统存储器28可以包括易失性存储器形式的计算机系统可读介质,例如随机存取存储器(RAM)30和/或高速缓存存储器32。计算机设备12可以进一步包括其它可移动/不可移动的、易失性/非易失性计算机系统存储介质。仅作为举例,存储系统34可以用于读写不可移动的、非易失性磁介质(图4未显示,通常称为“硬盘驱动器”)。尽管图4中未示出,可以提供用于对可移动非易失性磁盘(例如“软盘”)读写的磁盘驱动器,以及对可移动非易失性光盘(例如CD-ROM,DVD-ROM或者其它光介质)读写的光盘驱动器。在这些情况下,每个驱动器可以通过一个或者多个数据介质接口与总线18相连。存储器28可以包括至少一个程序产品,该程序产品具有一组(例如至少一个)程序模块,这些程序模块被配置以执行本发明各实施例的功能。
具有一组(至少一个)程序模块42的程序/实用工具40,可以存储在例如存储器28中,这样的程序模块42包括——但不限于——操作系统、一个或者多个应用程序、其它程序模块以及程序数据,这些示例中的每一个或某种组合中可能包括网络环境的实现。程序模块42通常执行本发明所描述的实施例中的功能和/或方法。
计算机设备12也可以与一个或多个外部设备14(例如键盘、指向设备、显示器24等)通信,还可与一个或者多个使得用户能与该计算机设备12交互的设备通信,和/或与使得该计算机设备12能与一个或多个其它计算设备进行通信的任何设备(例如网卡,调制解调器等等)通信。这种通信可以通过输入/输出(I/O)接口22进行。另外,本实施例中的计算机设备12,显示器24不是作为独立个体存在,而是嵌入镜面中,在显示器24的显示面不予显示时,显示器24的显示面与镜面从视觉上融为一体。并且,计算机设备12还可以通过网络适配器20与一个或者多个网络(例如局域网(LAN),广域网(WAN)和/或公共网络,例如因特网)通信。如图所示,网络适配器20通过总线18与计算机设备12的其它模块通信。应当明白,尽管图中未示出,可以结合计算机设备12使用其它硬件和/或软件模块,包括但不限于:微代码、设备驱动器、冗余处理单元、外部磁盘驱动阵列、RAID系统、磁带驱动器以及数据备份存储系统等。
处理单元16通过运行存储在系统存储器28中的程序,从而执行各种功能应用以及数据处理,例如实现本发明实施例所提供的车辆预警方法:
若检测到当前车辆的预警范围内存在异常目标,则获取所述异常目标信息,其中,所述异常目标信息包括异常目标的位置信息、异常目标的速度信息和/或异常目标的平面信息;
根据所述异常目标信息确定异常目标类型;
根据所述异常目标类型进行预警。
实施例五
本发明实施例五提供了一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现如本申请所有发明实施例提供的车辆预警方法:
若检测到当前车辆的预警范围内存在异常目标,则获取所述异常目标信息,其中,所述异常目标信息包括异常目标的位置信息、异常目标的速度信息和/或异常目标的平面信息;
根据所述异常目标信息确定异常目标类型;
根据所述异常目标类型进行预警。
可以采用一个或多个计算机可读的介质的任意组合。计算机可读介质可以是计算机可读信号介质或者计算机可读存储介质。计算机可读存储介质例如可以是但不限于电、磁、光、电磁、红外线、或半导体的系统、装置或器件,或者任意以上的组合。计算机可读存储介质的更具体的例子(非穷举的列表)包括:具有一个或多个导线的电连接、便携式计算机磁盘、硬盘、随机存取存储器(RAM)、只读存储器(ROM)、可擦式可编程只读存储器(EPROM或闪存)、光纤、便携式紧凑磁盘只读存储器(CD-ROM)、光存储器件、磁存储器件、或者上述的任意合适的组合。在本文件中,计算机可读存储介质可以是任何包含或存储程序的有形介质,该程序可以被指令执行系统、装置或者器件使用或者与其结合使用。
计算机可读的信号介质可以包括在基带中或者作为载波一部分传播的数据信号,其中承载了计算机可读的程序代码。这种传播的数据信号可以采用多种形式,包括但不限于电磁信号、光信号或上述的任意合适的组合。计算机可读的信号介质还可以是计算机可读存储介质以外的任何计算机可读介质,该计算机可读介质可以发送、传播或者传输用于由指令执行系统、装置或者器件使用或者与其结合使用的程序。
计算机可读介质上包含的程序代码可以用任何适当的介质传输,包括但不限于无线、电线、光缆、RF等等,或者上述的任意合适的组合。
可以以一种或多种程序设计语言或其组合来编写用于执行本发明操作的计算机程序代码,所述程序设计语言包括面向对象的程序设计语言,诸如Java、Smalltalk、C++,还包括常规的过程式程序设计语言,诸如“C”语言或类似的程序设计语言。程序代码可以完全地在用户计算机上执行、部分地在用户计算机上执行、作为一个独立的软件包执行、部分在用户计算机上部分在远程计算机上执行、或者完全在远程计算机或服务器上执行。在涉及远程计算机的情形中,远程计算机可以通过任意种类的网络——包括局域网(LAN)或广域网(WAN)—连接到用户计算机,或者,可以连接到外部计算机(例如利用因特网服务提供商来通过因特网连接)。
注意,上述仅为本发明的较佳实施例及所运用技术原理。本领域技术人员会理解,本发明不限于这里所述的特定实施例,对本领域技术人员来说能够进行各种明显的变化、重新调整和替代而不会脱离本发明的保护范围。因此,虽然通过以上实施例对本发明进行了较为详细的说明,但是本发明不仅仅限于以上实施例,在不脱离本发明构思的情况下,还可以包括更多其他等效实施例,而本发明的范围由所附的权利要求范围决定。
- 车辆水浸预警方法、车辆水浸预警装置、终端设备以及计算机可读存储介质
- 一种车辆充电预警方法、装置、计算机设备和存储介质