机器人化的建造系统
文献发布时间:2023-06-19 09:49:27
技术领域
本发明的目的是一种系统,该系统允许借助于直角坐标机器人以及移动机器人所必需的电力和电子设备来架设任何建造物,诸如尤其为建筑物、结构、基础设施,该直角坐标机器人具有液体建造材料的机器人供应,这些液体建造材料在凝固时形成建造物的竖直和水平元件。作为本发明的一个值得注意的特性,有可能直角坐标机器人自主地上升,紧固在建造物的竖直表面上,而不需要诸如起重机的外部提升元件。
背景技术
建造是一种对劳动力具有强烈需求的活动,这意味着它是具有不足的生产率和高的工作事故风险的领域,工作事故源自所进行的许多工作的人工性质。然而,机械扮演非常重要的角色,在大部分任务中以及在执行它们的安全性方面是必要的。
在所使用的机械中,可以注意到,用于提升材料、用于找平、用于制备和浇注砂浆和混凝土。
提高建造生产率的另一个元素是预制建造材料,诸如预制混凝土元件和面板。预制混凝土元件包括许多在工厂通过模制和凝固制成的产品,诸如大型结构预制元件(诸如梁、墙壁以及立柱)、小型结构预制元件(诸如托梁、混凝土筒体、块、路缘、铺路石)、以及特殊预制元件(其中有枕木、柱以及舱室)。但是直到现在,还没有开发出彻底减少建造任务中的人类参与的系统,或者至少申请人意识到还没有开发出这种系统。
本发明公开宣布了一种自动化系统,随着建造物越来越高,通过使用自主地上升到建造物上方的直角坐标机器人,并且通过液体建造材料的贡献,该自动化系统允许架设几乎任何类型的结构。
发明内容
作为本发明目的的一种机器人化的建造系统包括:
·直角坐标机器人,该直角坐标机器人又包括:
○两个水平梁,使得建造物的楼层的至少部分位于所述梁之间;
○一个或多个桥梁,该一个或多个桥梁布置在水平梁之间并且被设计为沿着所述水平梁移动;
○一个或多个小车,该一个或多个小车布置在每个所述桥梁上并且被设计为沿着所述桥梁移动;
○一个或多个伸缩柱,每个所述伸缩柱联接到所述小车中的一个;
○一个或多个悬臂,每个所述悬臂具有一个或多个自由度并联接到柱的自由端;
○多个致动器,这些致动器使桥梁、小车、悬臂移动并使伸缩柱伸出或缩回;
○桥梁、小车以及悬臂的多个位置传感器;
○可编程控制器,该可编程控制器至少控制致动器并从至少位置传感器接收数据;
·竖直和水平元件的一个或多个制造工具,该一个或多个制造工具布置在悬臂上,竖直和水平元件形成建筑物或其它类型的建造物的一部分;
·由所述控制器驱动的电力和电子供应装置;
·装置,该装置向制造工具同时供应一种或多种流体建造材料、水以及加压空气。
附图说明
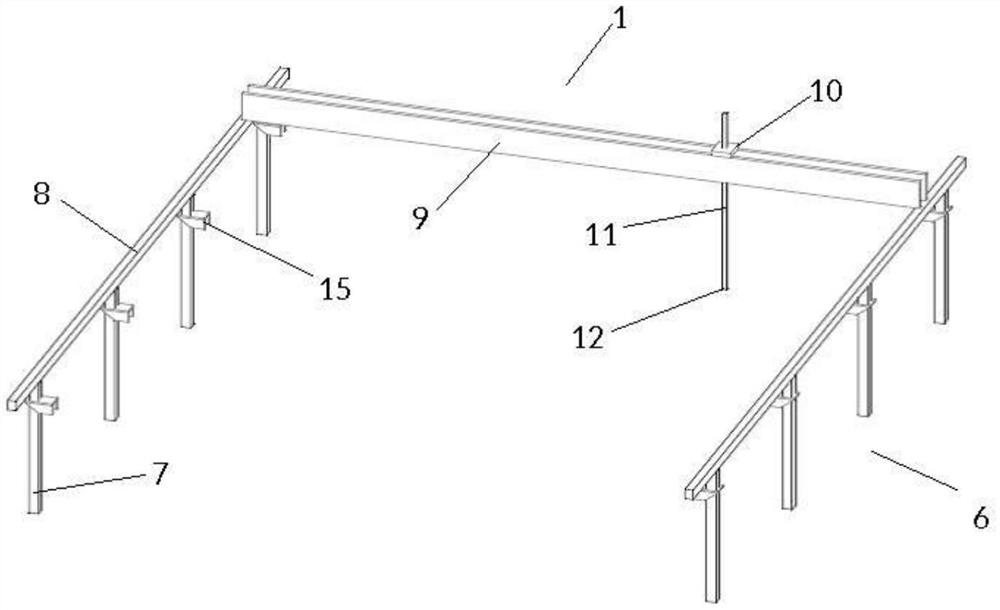
图1示出了直角坐标机器人的立体图。
图2示出了当建筑物的楼层已经建造并且提升装置锚固在所述楼层的天花板上时的直角坐标机器人的立体图。
图3示出了上升到已经建造的楼层上方的直角坐标机器人的立体图。
图4示出了四层建筑物和锚固在第三层天花板上的直角坐标机器人的立体图。
图5示出了准备开始上升的直角坐标机器人的细节的立体图。
图6示出了完全上升以建造新楼层的直角坐标机器人的细节的立体图。
图7示出了齿条小齿轮型提升装置的细节的立体图。
图8示出了具有两个桥梁的直角坐标机器人的立体图。
图9示出了具有两个桥梁和在每个桥梁上的两个小车的直角坐标机器人的立体图。
图10示出了本发明的用于材料和用于电力和电子电缆的管道的整个机器人供应系统的立体图。
图11示出了用于机器人供应系统中的机器人旋转滚筒的视图,其中管道以螺旋形式盘绕。
图12示出了弯曲的和动力驱动的装置以及旋转轴承的支撑件的视图,管道被引导通过旋转轴承。
图13示出了具有正方形截面的喷嘴以及处于建造过程中的竖直元件的示例的立体图。
图14示出了具有5个喷嘴的制造工具和建造的竖直元件的立体图,其中一个喷嘴是可移动的。
图15示出了具有布置在喷嘴自由端上的模具的制造工具的立体图。
图16示出了借助于通过图15的模具制成的元件建造的竖直元件的立体图。
图17示出了模具的立体图,其中模具的下表面打开并且存放固体建造元件。
图18示出了通过模制和真空工作的制造工具的立体图。
图19示出了用于以印刷辊形式沉积层的制造工具的分解立体图。
图20示出了形成诸如墙壁的建造元件的图19的工具的立体图。
图21示出了用于水平表面的找平工具的立体图。
图22示出了用于竖直表面的找平工具的两个立体图。
图23示出了粘合剂挤出工具和处理机的两个立体图。
图24示出了修整和抛光盘制造工具的立体图。
图25示出了修整和抛光盘制造工具的分解透视图。
具体实施方式
机器人化的建造系统包括直角坐标机器人(1)、一个或多个制造工具(3)、电力供应装置(4)以及建造材料供应装置(5)。
直角坐标机器人包括两个梁(8),偶尔由形成柱廊(6)的柱(7)补充,在图1、图8以及图9中,优选实施方式示出为具有四个柱和水平梁(8),其中,梁可伸缩以配合具有不同长度的建造物。一个或多个桥梁(9)也可以伸缩以在梁(8)彼此不平行的情况下改变它们的宽度,一个或多个桥梁(9)布置在水平梁(8)之间,并且在它们上布置一个或多个小车(10)。在图1中,仅一个桥梁(9)被示出为具有小车(10)。在图8中,直角坐标机器人(1)被示出为具有两个桥梁(9)和在它们中的每一个上的单个小车(10)。并且在图9中,直角坐标机器人(1)被示出为具有两个桥梁(9)和在桥梁(9)中的每一个上的两个小车(10)。这最后两个优选实施方式提高了建造的速度,因为控制器避免了小车彼此干扰。
优选地,建造系统包括用于提升梁(8)或柱廊(6)的系统(2)。
在每个伸缩柱(11)的自由端上,每个伸缩柱联接到小车。悬臂(12)可以布置在直角坐标机器人的控制器上并由其控制。悬臂设置有一个或多个自由度,例如,悬臂(12)可以相对于竖直轴线和/或相对于水平轴线旋转,以便更准确地定位制造工具(3)或将其相对于伸缩柱垂直地定位,例如以将粘合剂或绝缘层涂敷在竖直或倾斜表面上。
图1至图7示出了直角坐标机器人(1)在五层建筑物的情况下随着建造继续进行而如何上升。锚具被分成第一锚具(14)和第二锚具(15)。该第一锚具与柱(7)的下端成一体,并且柱廊(6)在机器人化的建造系统工作时支撑在第一锚具上。第二锚具沿着柱(7)是可移动的,仅在它们必须提升直角坐标机器人(1)时固定在建造物上,并且例如在齿条小齿轮(pinion)型提升装置、小齿轮(16)以及驱动小齿轮的马达(18)将被安装在第二锚具上并且齿条(17)将位于柱(7)上的情况下形成提升装置(2)的一部分。图1示出了直角坐标机器人(1),该直角坐标机器人在地面上被支撑在位于柱的上部处的提升系统(2)的第一锚具(14)和第二锚具(15)上。在图2中,第一层已经建好,第二锚具(15)被支撑在第一层的地面上或者建筑物或建造物的表面上,并且当第一锚具(14)被锚固在结构上时,第二锚具借助于提升装置(2)同时提升两个柱廊(6),使本发明处于其工作位置以建造新楼层,参见图3。图5示出了一旦第四层完成并准备提升机器人化的建造系统以开始架设第五层,如何将柱廊(6)支撑在第一锚具(14)和第二锚具(15)上。
提升装置(2)可以是齿条小齿轮型,由电动马达(18)借助于液压缸的驱动棘轮扳手的液压或气动活塞、借助于机械操作的螺纹主轴或类似系统驱动。所有类型的提升装置将由直角坐标机器人的控制器控制和驱动。另一种可能的提升装置(2)是借助于伸缩柱(7),使得随着柱廊上升,柱(7)支撑在作为柱廊(7)的柱沿着地面向下的延伸部分的下柱上。
另一方面,供应装置(4和5)可以设置有一个或多个管道(19)。其中一个或多个管道用于流体建造材料(例如水泥基建造材料),一个或多个管道用于隔声或保暖涂层的辅助材料,两个或多个管道用于水和压缩空气,并且一个或多个管道用于机器人供电。供应建造材料(5)的管道(19)液压地接合储罐并用制造工具(3)泵送流体。供应装置(4和5)作为整体且在优选构造中由柔性元件形成,并且包括一个或多个辅助马达驱动的滚筒(20),滚筒由机器人的控制器控制,与机器人同时移动,其中柔性元件以螺旋方式盘绕,不同的管道(19)可以全部盘绕在一个或多个滚筒(20)中,或者盘绕在仅专用于一个管道(19)的一个或多个滚筒(20)中。管道(19)从滚筒(20)出来,并经过一个伸缩柱(7)直到水平梁(8)。管道(19)的竖直布置到水平布置的过渡借助于弯曲的且马达驱动的装置(21)来进行,该装置根据整个机器人的移动将管道(19)推向滚筒(20)或推向制造工具(3)。这样,避免了摩擦,并保证了满足每个不同管道(19)的最小弯曲半径。弯曲装置(21)设置有自由旋转轴承(22)和联接到马达(23)的辊(100),并且辊借助于弹簧(24)压缩管道(19),以便使管道受控且与滚筒(20)的旋转同时地移动。随着管道(19)在水平梁(8)旁边流动,管道通过在独立小车(27)上具有旋转轴承(26)的支撑件(25)的内部部分来进行流动,小车在安装在水平梁(8)中的轨道(28)上滑动。小车以确定的最大距离并由于使用了如图12所示的伸缩系统或剪刀(29)而分开,该最大距离根据管道系统(19)的类型确定。第一小车(27)被锚固到移动桥梁(9)的小车,而其余小车彼此锚固,使得在需要时打开。
管道(19)在水平梁(8)与桥梁(9)之间的过渡借助于与前段中公开的弯曲的且马达驱动的装置类似的弯曲的且马达驱动的装置(21)来进行。并且与前面的公开类似地,管道(19)通过在独立小车(101)上具有旋转轴承(26)的支撑件的内部部分而在桥梁(9)旁边流过,小车在轨道(30)上滑动,并且以根据管道系统(19)的类型确定的最大距离并由于使用了伸缩系统或剪刀(29)而分开,直到借助于与前面类似的弯曲的且马达驱动的装置(21)过渡到伸缩柱(11)为止。弯曲的且动力驱动的装置(21)和滚筒(20)的机动化通过控制器同步,并且基于轴线Z或工具(3)的末端的位置释放确定长度的管道(19)。
先前公开的管道系统(4和5)也由本发明的不同致动器和电动马达的供应的供电电缆使用。
显然,供应系统(4和5)设置有刚性元件与柔性元件之间的快速连接件(99)、开/关阀、制造建造材料的罐(32)的出口处的至少一个主泵(31)、制造工具(3)的入口处的至少一个副泵(33),该副泵可以是螺旋螺杆或双驱动活塞泵的类型,在次级泵(33)的出口处可以设置有吸气阀,以从由机器人的所述控制器控制的所有前述元件上的管道和流量传感器去除空气。
供应系统(4和5)的变型包括:管道由电缆悬挂链和管道引导,电缆悬挂链和管道支撑在梁(8)和桥梁(9)的上部上,并且又锚固在允许桥梁(9)以及伸缩柱(11)的移动的小车上。这样,引导管道(9)将不受机器人的所述控制器控制。
建造材料(5)的管道(19)的供应系统(4和5)的变型包括一个或多个无人驾驶飞行器,通常称为无人机,无人驾驶飞行器设置有一个或多个建造材料的罐,飞到伸缩柱(11)的上部并且将建造材料注入到其中,直接到达工具(3)和/或到达有关的主泵(31)和副泵(33)和/或开/关阀。无人机将由控制器控制,在这种情况下,控制器将设置有与无人机无线通信的装置。
关于建造物的竖直和水平元件的制造工具(3),设计了四种类型的工具:用于沉积、用于模制和用于放置、用于抛掷和修整以及处理。
第一种类型的制造工具(3)包括一个或多个喷嘴,喷嘴液压地联接到悬臂(12),且电气地连接到供应装置(4和5)。并且喷嘴被设计成沉积流体建造材料层,流体建造材料层在凝固时生成所述竖直或水平元件。喷嘴(34)中的至少一个可具有矩形截面并且可为制造工具(3)的独特喷嘴。所述喷嘴可设有由控制器驱动的开/关阀(35)并且甚至设有用于每个喷嘴的独立泵送系统,以便完美地定量供应材料。喷嘴可以设置有侧板,该侧板借助于马达进行角移动,该马达允许对沉积的材料提供支撑和/或一旦材料已经被沉积就将由侧板的粗糙度预定的形状赋予材料。
制造工具(3)可设有两个或更多个喷嘴(34),并且每个喷嘴可沉积不同的流体材料,例如,一种水泥基材料和隔音或保暖材料。另外,一个或多个喷嘴(34)可借助于由控制器驱动的电动马达(36)相对于固定或移动的其余喷嘴(34)在水平面上移动,以制造例如图14的竖直元件。
作为具有一个或多个喷嘴(34)的制造工具(3)的变型,在一个喷嘴(34)的出口处,可以设置印刷辊(36),该印刷辊沉积具有确定设计的层。所述辊包括结构(102),四个同心管(37)紧固到该结构,并且四个同心管中的一个布置在另一个内,四个同心管中的两个是旋转的。这些管(37)在其表面上具有一系列中空部,当旋转时,这些中空部与材料的注入一起形成建造元件。
制造工具(3)的另一变型将是在单个装置中混合前述两种系统而得到的。
作为工具的另一变型,我们具有:在一个喷嘴(34)的出口处,可设置模具(38),以随着流体在模具内凝固而生成具有预定形状的固体建造元件。优选地,当所述固体元件的下表面(39)被打开时,所述固体元件被沉积在预定位置,并且所述固体元件被例如由压缩空气驱动的推进器(40)排出,推进器和压缩空气两者都由控制器驱动。模具(38)可以设置有压实和振动装置,并且例如通过感应加热以加速流体建造材料的凝固。该工具的一种变型是将光照射到引入模具中的建造材料,以便使建造材料硬化,并在建造材料硬化之后将其沉积在适当位置。
同样,在悬臂(12)上,可以安装用于找平水平或竖直表面的工具(3)。这些工具可以具有用于压实所提供的材料的振动运动;用于处理固体材料的工具;用于修整和抛光表面的圆盘;用于涂敷粘合剂和面板的钻头或细长喷嘴;用于处理预制建造元件的工具,诸如形成结构元件所必需的梁或金属装甲。
关于找平工具,认为方便的是引用和描述工具找平水平表面(60)和工具找平竖直表面(70)。
在优选的构造中,工具找平水平表面是连接在管道(34)的出口处的收集器(61),通过该收集器运送可以是水泥基的流体建造材料,收集器允许建造材料可以均匀地流出并且以必要的位置和数量沉积。主管道安装有阀(35),该阀被远程控制并与主泵(31)和副泵(33)同步。该工具具有深度传感器(62),该深度传感器被安装用于确定工具直到其将被存放的位置或地点的距离,并且将该信号发送到控制器。在收集器(61)旁边安装了尺(63),尺由于快速返回机构64而进行纵向移动,该纵向移动使得沉积的材料除了被压实之外还能够被完美找平。如果需要,尺可以包括振动装置以增加其振动能力,该振动装置可以被隔离以避免将振动传递到本发明的其余部分。
所述尺(63)可借助于线性滑块(65)紧固到工具的其余部分。线性滑块允许尺的纵向位移。线性滑块通过轴线与收集器连接,以允许尺借助于两个致动器(66)的作用与工具的结构一起旋转。
工具找平竖直表面(70)被设计为在墙面上用不同材料进行连续涂布。在优选的构造中,工具找平竖直表面由一个管道(71)的引导和摆动移动构成,该管道释放一定量的确定的流体建造材料,并连接到另一压缩空气管道(72),实现将其抛掷在面层上。工具另外设有移动的、振动的和铰接的尺(73),由于由控制器引导的气动或电动致动器(74),该尺进行支撑件上的材料的对齐。工具除了在管道出口处的流量计之外还设有用于测量向下至支撑件的深度的传感器(75),这些传感器将信号发送至控制器,用于引导移动。
材料和压缩空气的供应或不供应借助于由控制器驱动的阀来进行。
其它制造工具是:粘合剂挤出工具,该粘合剂挤出工具允许在表面上沉积确定量的粘合剂以固定涂层,例如在墙壁和地面上的陶瓷涂层;和处理工具(90),该处理工具实现从存在于特定地点的原料中拾取材料并将其在确切位置中且准确地涂敷在墙壁上。在优选实施方式中,这两个工具变成一个,并且它包括具有矩形横截面的喷嘴(91)和粘合剂材料出去和沉积所通过的出口槽。该同一工具安装有抽吸式操纵器(92),该操纵器借助于真空实现从原料中拾取材料并将其在确切位置中涂敷在墙壁上,并且准确地使用保证完美放置的压力传感器。操纵器(92)和喷嘴(91)彼此成90度定向,并且借助于由控制器驱动的电动马达(93)旋转,以便将操纵器或喷嘴定位成面向表面。
另一种制造工具(3)包括一个或多个喷嘴(34),喷嘴供给用于将建造材料抛掷到支撑件上或其自身上的枪或机构,以生成新的建造元件或在其他现有的建造元件上沉积层,作为表面的涂层。
另一种制造工具(3)包括修整和抛光圆盘(64),该修整和抛光圆盘包括具有高转速的旋转马达(641)。该旋转马达旋转一刚性支撑圆盘(644),不同材料的修整盘(643)联接到该刚性支撑圆盘,又紧固在马达(645)的轴线上并且允许进行抛光表面,诸如墙壁和地面。
优选地,机器人化的建造系统(1)包括耐候保护系统。该保护系统在桥梁(9)的方向上并且在每个桥梁(9)的两侧上从一个柱廊(8)水平地延伸到另一个柱廊,并且根据桥梁(9)的移动而伸出和缩回,以允许该保护系统的自由移动并且保护机器人的工作区域免受气候影响。该系统被设计为将来自雨水的水引导到建造区域外。
- 机器人化的建造系统
- 用于驱动细长柔性医疗构件的可机器人化模块、医用机器人以及包括这种模块的系统