一种健美操柔韧性训练辅助装置
文献发布时间:2023-06-19 10:35:20
技术领域
本发明涉及体育辅助装置领域,特别涉及一种健美操柔韧性训练辅助装置。
背景技术
健美操是一项健康的有氧运动,深受广大女性同志的喜爱。健美操在训练的时候,会对身体的柔韧性进行训练,在训练柔韧性的时候,一般会训练压腿和坐位体前屈,也就是训练韧带的拉伸,在训练的时候,通常都需要另一个人帮助训练者进行按压,使得训练者可以长时间的保持训练的动作,从而达到训练的效果,通常情况下,都是多个训练者两两为一组,每一组的两个训练者相互的帮助对方进行训练,这样就会使得在训练的时候,增长训练的时间而降低训练的效率,同时,人为的进行按压使得训练者也不能很好的掌握力度,极有可能对训练者造成韧带拉伤的情况。
发明内容
本发明的目的是克服上述现有技术中存在的问题,提供一种健美操柔韧性训练辅助装置,使得训练者将胯部进行固定,在使得训练者根据自身的情况调节上身与胯部之间的角度,从而达到训练韧带拉伸的目的。
为此,本发明提供一种健美操柔韧性训练辅助装置,包括:圆环,纵向的设置在地面的上方,其底部通过支撑架平稳的固定在地面上;胯部固定器,用于固定训练者的胯部,设置在所述圆环的圆心处,通过支撑杆与所述圆环左侧的内侧面连接,所述支撑杆与所述圆环固定连接,支撑杆与所述胯部固定器通过铰接件铰接;踩踏板,水平的设置在所述胯部固定器的正下方,连接在所述圆环下端的内侧面上;手持板,滑动连接在所述圆环的内侧面上,其滑动轨迹位于所述圆环的右侧且连续,滑动轨迹起始于所述圆环的上端终止于所述踩踏板的一侧,所述手持板在所述圆环的内侧面的滑动通过驱动机构进行驱动,所述驱动机构由训练者进行控制。
进一步,所述胯部固定器包括开口指向所述滑动轨迹的U型杆,U型杆的开口通过固定带封闭,所述固定带包括两个弹力带,所述U型杆的两端分别连接有一个所述弹力带,两个所述弹力带通过固定扣进行可拆卸连接。
进一步,所述铰接件包括凹槽和位于所述凹槽内部的活动块,所述活动块的尺寸大于所述凹槽槽口的尺寸,所述凹槽开设在所述U型杆中部的外表面,所述活动块与所述支撑杆固定连接。
进一步,所述圆环左侧的内侧面上开设有第一滑槽,所述第一滑槽起始于所述圆环的上端且终止于所述踩踏板的一侧,所述第一滑槽上滑动连接有第一滑块,所述手持板与所述第一滑块固定连接,所述驱动机构用于驱动所述第一滑块在所述第一滑槽上的运动。
更进一步,所述驱动机构包括:齿条,沿所述第一滑槽的长度走向设置在所述第一滑槽的槽底;齿轮,设置在所述第一滑块面向所述第一滑槽槽底的一面,与所述齿条相啮合;电机,设置在所述第一滑块面向所述第一滑槽槽底的一面,电机的输出轴与所述齿轮同轴连接,所述电机与电源装置电连接,其工作状态由训练者进行控制。
更进一步,所述所述第一滑块通过第一伸缩机构与所述手持板相连接,所述第一伸缩机构的第一调节器设置在所述手持板上。
更进一步,所述手持板上设置有两个U型的拉手,拉手的开口指向所述手持板,所述第一调节器设置在所述拉手在所述手持板的投影位置上。
更进一步,所述踩踏板通过第二伸缩机构与所述圆环连接,所述第二伸缩机构的第二调节器设置在所述胯部固定器的表面。
更进一步,所述胯部固定器的下表面和所述踩踏板的上表面通过长度可变的伸缩杆连接,所述伸缩杆的表面延期长度方向分别设置有多个腿部固定器。
进一步,所述踩踏板的上表面开设有水平方向的第二滑槽,第二滑槽所在的直线与所述圆环所在的平面相垂直,所述第二滑槽上滑动连接有两个第二滑块,第二滑块上设置有足部固定器,两个所述第二滑块相对的面上分别设置有一个电磁铁,两个所述电磁铁通电后产生相吸的磁力,所述第二滑槽两端槽壁的每一个槽壁上分别通过一个弹簧连接有一个挡板,所述挡板位于所述第二滑槽的内部。
本发明提供的一种健美操柔韧性训练辅助装置,具有如下有益效果:
1、本发明使得训练者将胯部进行固定,在使得训练者根据自身的情况调节上身与胯部之间的角度,从而达到训练韧带拉伸的目的;
2、本发明通过可限位的伸缩机构连接在滑块上,这样就可以通过对伸缩机构进行调节,从而使得本发明所提供的装置可以适用于任何身高体型的人群,从而使得适用的范围更广;
3、本发明在踩踏板上还通过设置有可以横向分开的滑块,使得训练者在同时进行劈叉的训练,同时在劈叉的时候,还可以进行韧带的拉伸。
附图说明
图1为本发明的整体结构示意图;
图2为本发明中胯部固定器的结构示意图;
图3为本发明中驱动机构的工作原理结构示意图;
图4为本发明中手持板的连接结构示意图;
图5为本发明中踩踏板上表面的结构关系示意图。
附图标记说明:
1、圆环;2、支撑杆;3、支撑架;5、第二伸缩机构;5-1、第二调节器;6、踩踏板;7、胯部固定器;8、第一滑槽;9、第一伸缩机构;9-1、第一调节器;10、拉手;11、手持板;12、第一滑块;13、固定带;13-1、固定扣;13-2、弹力带;14、铰接件;14-1、凹槽;14-2、活动块;15、驱动机构;15-1、齿轮;15-2、电机;15-3、齿条;16、弹簧;17、第二滑块;18、电磁铁;19、足部固定器;20、挡板;21、第二滑槽。
具体实施方式
下面结合附图,对本发明的一个具体实施方式进行详细描述,但应当理解本发明的保护范围并不受具体实施方式的限制。
在本申请文件中,未经明确的部件型号以及结构,均为本领域技术人员所公知的现有技术,本领域技术人员均可根据实际情况的需要进行设定,在本申请文件的实施例中不做具体的限定。
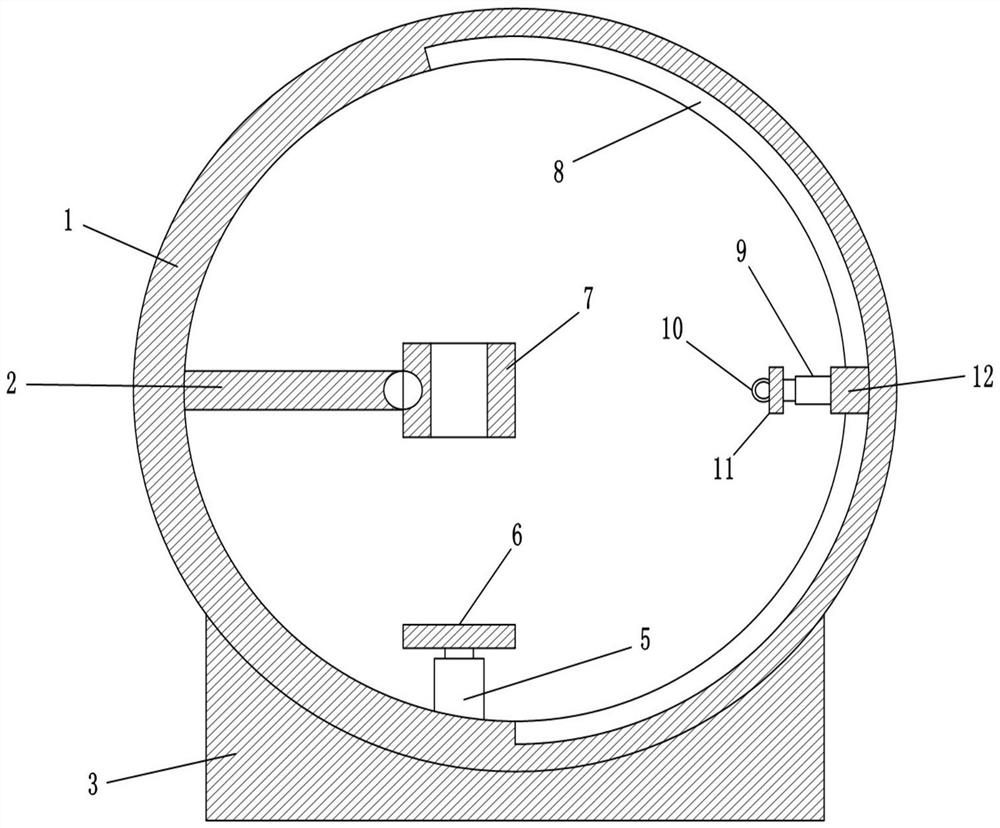
具体的,如图1-5所示,本发明实施例提供了一种健美操柔韧性训练辅助装置,包括:圆环1、胯部固定器7、踩踏板6以及手持板11。其中,圆环1纵向的设置在地面的上方,其底部通过支撑架3平稳的固定在地面上;胯部固定器7用于固定训练者的胯部,设置在所述圆环1的圆心处,通过支撑杆2与所述圆环1左侧的内侧面连接,所述支撑杆2与所述圆环1固定连接,支撑杆2与所述胯部固定器7通过铰接件14铰接;踩踏板6水平的设置在所述胯部固定器7的正下方,连接在所述圆环1下端的内侧面上;手持板11滑动连接在所述圆环1的内侧面上,其滑动轨迹位于所述圆环1的右侧且连续,滑动轨迹起始于所述圆环1的上端终止于所述踩踏板6的一侧,所述手持板11在所述圆环1的内侧面的滑动通过驱动机构15进行驱动,所述驱动机构15由训练者进行控制。
上述技术方案中,训练者在使用的时候,将自己的胯部使用胯部固定器7进行固定,这样就使得训练者的胯部始终位于圆环1的圆心处,训练者踩在踩踏板6上,手部抓着手持板11,此时就可以进行拉伸的训练了,训练者通过控制驱动机构15使得手持板11沿着圆环1进行滑动,慢慢的,训练者的身体就会与腿部呈现出夹角,之后,训练者通过调节手持板11在圆环1上位置,就可以改变自己的身体与腿部之间的夹角,从而达到一人单独就可以进行训练的效果,而且训练者根据自己的自身情况自行进行调节。
在本发明中,使用圆环1还可以同时使得训练者在训练的时候,姿势更加的标准,因为训练者在进行拉伸的时候,标准的动作就是胯部为圆心,上身向下转动运动,这样可以防止训练的时候产生肌肉的拉伤,因此,本发明使用圆环1,并且使得手持板11在圆环1上滑动,这样就限定了训练者的手部,也就从而限定了训练者的上身转动轨迹,同时,使用使用胯部固定器7将胯部进行固定,这样就将转动的圆心进行了固定,从而使得动作更加的标准。
在本实施例中,所述胯部固定器7包括开口指向所述滑动轨迹的U型杆,U型杆的开口通过固定带13封闭,所述固定带13包括两个弹力带13-2,所述U型杆的两端分别连接有一个所述弹力带13-2,两个所述弹力带13-2通过固定扣13-1进行可拆卸连接。
上述技术方案中,训练者将胯部放置在U型杆内,使用弹力带13-2进行固定,这样训练者的身体进行转动时候,弹力带13-2由于自身的柔韧性,就可以使得在训练者进行训练的时候,不会起到阻碍训练者的身体进行转动的作用,使得训练者在训练的时候,胯部的转动更加的舒适。
在本实施例中,所述铰接件14包括凹槽14-1和位于所述凹槽14-1内部的活动块14-2,所述活动块14-2的尺寸大于所述凹槽14-1槽口的尺寸,所述凹槽14-1开设在所述U型杆中部的外表面,所述活动块14-2与所述支撑杆2固定连接。这样可以使得U型杆与支撑杆2之间灵活的进行活动,使得支撑杆2与U型杆之间的角度灵活的进行改变,从而使得训练者在训练的时候,胯部的转动更加的舒适。
在本实施例中,所述圆环1左侧的内侧面上开设有第一滑槽8,所述第一滑槽8起始于所述圆环1的上端且终止于所述踩踏板6的一侧,所述第一滑槽8上滑动连接有第一滑块12,所述手持板11与所述第一滑块12固定连接,所述驱动机构15用于驱动所述第一滑块12在所述第一滑槽8上的运动。这里提供了手持板11和圆环1之间的一种滑动连接方式。
同时,在本实施例中,根据上述的手持板11和圆环1之间的滑动连接方式,提出一种驱动机构15的结构,所述驱动机构15包括:齿条15-3、齿轮15-1以及电机15-2。其中,齿条15-3沿所述第一滑槽8的长度走向设置在所述第一滑槽8的槽底;齿轮15-1设置在所述第一滑块12面向所述第一滑槽8槽底的一面,与所述齿条15-3相啮合;电机15-2设置在所述第一滑块12面向所述第一滑槽8槽底的一面,电机15-2的输出轴与所述齿轮15-1同轴连接,所述电机15-2与电源装置电连接,其工作状态由训练者进行控制。
上述技术方案中,训练者通过控制电机15-2的工作,即输出轴的转动,使得齿轮15-1转动,从而使得齿轮15-1沿着齿条15-3相对移动,从而使得手持板11沿着圆环1表面进行滑动。
在本发明的实施例中,电机15-2使用的步进电机,其控制端可以设置在手持板11上,方便训练者进行操作。
同时,在本实施例中,所述所述第一滑块12通过第一伸缩机构9与所述手持板11相连接,所述第一伸缩机构9的第一调节器9-1设置在所述手持板11上。
上述技术方案中,在训练者用过控制第一调节器9-1调节第一伸缩机构9的长度状态,这样就可以使得在训练者在训练的时候,对训练者的手臂的长度没有要求,同时可以使得无论多长的手臂都可以和手持板11以及滑块12处于同一直线上进行运动。
同时,在本实施例中,所述手持板11上设置有两个U型的拉手10,拉手10的开口指向所述手持板11,所述第一调节器9-1设置在所述拉手10在所述手持板11的投影位置上。训练者在训练的时候,将手拉着拉手10,这样也方便对第一调节器9-1进行控制。
同时,在本实施例中,所述踩踏板6通过第二伸缩机构5与所述圆环1连接,所述第二伸缩机构5的第二调节器5-1设置在所述胯部固定器7的表面。
上述技术方案中,在训练者用过控制第二调节器5-1调节第二伸缩机构5的长度状态,这样就可以使得在训练者在训练的时候,对训练者的腿部的长度没有要求,结合上述的对手臂的长度没有要求,就使得本发明对训练者的身高体型的任何情况全部进行兼容。第二调节器5-1可以设置在胯部固定器7的表面,这样方便手动的调节。
同时,在本实施例中,所述胯部固定器7的下表面和所述踩踏板6的上表面通过长度可变的伸缩杆连接,所述伸缩杆的表面延期长度方向分别设置有多个腿部固定器。训练者在训练的时候,将将腿部使用腿部固定器进行固定,这样就可以使得在训练的时候,不会产生腿部的弯曲,从而使得更好的达到训练的效果。
在本实施例中,所述踩踏板6的上表面开设有水平方向的第二滑槽21,第二滑槽21所在的直线与所述圆环1所在的平面相垂直,所述第二滑槽21上滑动连接有两个第二滑块17,第二滑块17上设置有足部固定器19,两个所述第二滑块17相对的面上分别设置有一个电磁铁18,两个所述电磁铁18通电后产生相吸的磁力,所述第二滑槽21两端槽壁的每一个槽壁上分别通过一个弹簧20连接有一个挡板20,所述挡板20位于所述第二滑槽21的内部。
上述技术方案中,同时还可以训练劈叉,也可以在劈叉的同时转动身体,使得柔韧性训练的更加的全面,在使用的时候,训练者将脚部使用足部固定器19进行固定,在就可以使得脚部随着第二滑块17进行滑动,从而使得达到移动的更加方便的效果,当第二滑块17移动到第二滑槽21的端点的时候,通过弹簧20和挡板20,使得产生一个缓冲的作用,当不需要劈叉的时候,控制电磁铁18使得电磁铁18通电,两个电磁铁18通电后产生相吸的磁力,使得两个第二滑块17进行接触,而且不会分离,这样就不会使得足部分开。
以上公开的仅为本发明的几个具体实施例,但是,本发明实施例并非局限于此,任何本领域的技术人员能思之的变化都应落入本发明的保护范围。
- 一种健美操柔韧性训练辅助装置
- 一种健美操柔韧性兼平衡性训练辅助装置及方法