飞行器的控制方法、装置、飞行器及计算机可读存储介质
文献发布时间:2023-06-19 10:38:35
技术领域
本申请涉及计算机视觉技术和飞行器在军事领域的应用,尤其涉及飞行器的控制方法、装置、飞行器及计算机可读存储介质。
背景技术
在某些作战环境,由于多山地积雪、高海拔等原因,单兵能见度较低,可携带的武器重量有限,造成单兵的侦查搜索范围和攻击强度都不高。在面对冲突(城市巷战、近战、山地战)时,攻防能力都较弱。因此,需要一款攻防兼备、轻巧智能的飞行器来应对这种场景,并增加军队,特别是单兵的数字化程度以及感知和打击范围,将飞行器所收集到的情报融合到更前线的作战单位,提升部队战斗力。
然而,现有技术的飞行器功能较为单一,多数飞行器只有侦查的功能,无法攻击,且未能脱离对人工控制的依赖,全程需要人工驾驶或者后方有人工操纵,这在现代化、信息化的战争中,产出的价值较低,出错率相对较高。例如以色列拉斐尔公司的Spike“萤火虫”战术游荡炸弹(自杀式微型无人机),仍然存在如下问题:无法真正地做到自主选择、辨别目标,需要人工在后台全程操控;攻击模式单一,即自爆。
发明内容
本申请的目的在于提供飞行器的控制方法、装置、飞行器及计算机可读存储介质,解决现有技术的飞行器需要人工控制和只能自杀式攻击的问题。
本申请的目的采用以下技术方案实现:
第一方面,本申请提供了一种飞行器的控制方法,应用于设置在所述飞行器上的处理器,所述飞行器还包括存储器、摄像头和战斗部,所述方法包括:接收所述摄像头发送的第一图像信息;读取所述存储器存储的攻击目标信息;根据所述第一图像信息和所述攻击目标信息,检测所述第一图像信息对应的区域是否存在攻击目标;若存在,则控制所述战斗部发射,以使所述战斗部攻击所述攻击目标。该技术方案的有益效果在于,在飞行器上设置处理器,对摄像头采集到的图像信息进行处理,检测区域内是否存在攻击目标,如果存在则自动控制战斗部对攻击目标进行攻击。上述过程不需要人工参与,解决了人工手动控制的问题;且由于处理器设置在飞行器上,在飞行器本地完成图像处理并生成对战斗部的控制指令,因此也不需要将图像信息回传到地面基站的后台服务器并由后台服务器进行图像处理以及返回控制指令,不依赖后方士兵或者驾驶人员通过摄像头进行人工肉眼识别,解决了现有技术的飞行器无法自主进行图像处理和控制战斗部参与战斗的问题;另外,控制战斗部发射而非自杀式袭击,飞行器可以重复利用、多次发动攻击,大大节约成本;由于不需要远程控制,大大减少了飞行器与后台服务器的交互次数,降低了飞行器在通信过程中被发现的可能性,提升了飞行器的安全性。
在一些可选的实施例中,所述若存在,则控制所述战斗部发射,以使所述战斗部攻击所述攻击目标,包括:若存在,则检测所述第一图像信息对应的区域中的攻击目标的数量是否大于1个;若大于1个,则从所有攻击目标中确定第一攻击目标;控制所述战斗部发射,以使所述战斗部攻击所述第一攻击目标。该技术方案的有益效果在于,当检测到不止1个攻击目标时,可以选择性地攻击其中一个攻击目标。
在一些可选的实施例中,所述从所有攻击目标中确定第一攻击目标,包括:确定所有攻击目标中距离所述飞行器最近的攻击目标作为所述第一攻击目标;或者,确定所有攻击目标中面积或体积最大的攻击目标作为所述第一攻击目标;或者,确定所有攻击目标中速度最低的攻击目标作为所述第一攻击目标。该技术方案的有益效果在于,在选择优先攻击的目标时,可以考虑距离、打击面积、速度等因素,将距离最近的、面积或体积最大的、速度最低的攻击目标之一作为优先攻击的对象,更加符合实际应用中的需求。
在一些可选的实施例中,所述从所有攻击目标中确定第一攻击目标,包括:根据所有攻击目标中每个攻击目标的优先级参数,从所有攻击目标中确定所述第一攻击目标,所述每个攻击目标的优先级参数由以下至少一个参数确定:所述每个攻击目标与所述飞行器之间的距离、所述每个攻击目标的面积或体积、所述每个攻击目标的速度。
在一些可选的实施例中,所述方法还包括:检测所述飞行器是否满足回收条件,所述回收条件包括以下至少一种:未被激光锁定、未被干扰、未被黑客入侵、未被追踪和动力足够飞行至回收地点;若满足,则控制所述飞行器飞行至所述回收地点。该技术方案的有益效果在于,对飞行器进行回收,解决现有技术的飞行器无法回收再利用、不够经济的问题;在回收之前进行回收条件的检测,对满足回收条件的飞行器进行回收,提升了飞行器及回收地点的安全性。
在一些可选的实施例中,所述飞行器还包括信号干扰装置;所述若满足,则控制所述飞行器飞行至所述回收地点,包括:若满足,则控制所述信号干扰装置打开后,控制所述飞行器飞行至所述回收地点。该技术方案的有益效果在于,为飞行器增加了信号干扰功能,提高飞行器回收过程中的安全性。
在一些可选的实施例中,所述飞行器还包括壳体,所述壳体的外部设置有显示屏,所述处理器和所述存储器位于所述壳体内部,所述摄像头处于工作状态时至少部分外露于所述壳体,所述战斗部位于所述壳体内部或外部;所述方法还包括:接收所述摄像头发送的第二图像信息,所述第二图像信息用于显示所述飞行器的周围环境;根据所述第二图像信息控制所述显示屏的显示内容,以使所述壳体实现隐身功能。该技术方案的有益效果在于,通过摄像头采集周围环境信息,以此来控制显示屏的显示内容,使飞行器产生类似“变色龙”的效果,能够根据周围环境改变飞行器的外部显示,实现飞行器的隐身功能。
在一些可选的实施例中,所述显示屏包括多个显示单元,所述根据所述第二图像信息控制所述显示屏的显示内容,包括:根据所述第二图像信息,获取每个显示单元对应的显示内容并控制所述每个显示单元显示对应的显示内容。该技术方案的有益效果在于,多个显示单元可能分别位于飞行器的不同位置,例如上表面、侧面和下表面,使不同位置的显示单元显示不同的显示内容,增强飞行器的伪装效果,提升飞行器的安全性。
第二方面,本申请提供了一种飞行器的控制装置,所述飞行器包括处理器、存储器、摄像头和战斗部,所述处理器包括所述装置,所述装置包括:接收模块,用于接收所述摄像头发送的第一图像信息;读取模块,用于读取所述存储器存储的攻击目标信息;检测模块,用于根据所述第一图像信息和所述攻击目标信息,检测所述第一图像信息对应的区域是否存在攻击目标;第一控制模块,用于若存在,则控制所述战斗部发射,以使所述战斗部攻击所述攻击目标。
在一些可选的实施例中,所述第一控制模块用于:若存在,则检测所述第一图像信息对应的区域中的攻击目标的数量是否大于1个;若大于1个,则从所有攻击目标中确定第一攻击目标;控制所述战斗部发射,以使所述战斗部攻击所述第一攻击目标。
在一些可选的实施例中,所述第一控制模块还用于:确定所有攻击目标中距离所述飞行器最近的攻击目标作为所述第一攻击目标;或者,确定所有攻击目标中面积或体积最大的攻击目标作为所述第一攻击目标;或者,确定所有攻击目标中速度最低的攻击目标作为所述第一攻击目标。
在一些可选的实施例中,所述第一控制模块还用于:根据所有攻击目标中每个攻击目标的优先级参数,从所有攻击目标中确定所述第一攻击目标,所述每个攻击目标的优先级参数由以下至少一个参数确定:所述每个攻击目标与所述飞行器之间的距离、所述每个攻击目标的面积或体积、所述每个攻击目标的速度。
在一些可选的实施例中,所述装置还包括回收模块,所述回收模块用于:检测所述飞行器是否满足回收条件,所述回收条件包括以下至少一种:未被激光锁定、未被干扰、未被黑客入侵、未被追踪和动力足够飞行至回收地点;若满足,则控制所述飞行器飞行至所述回收地点。
在一些可选的实施例中,所述飞行器还包括信号干扰装置;所述回收模块还用于:若满足,则控制所述信号干扰装置打开后,控制所述飞行器飞行至所述回收地点。
在一些可选的实施例中,所述飞行器还包括壳体,所述壳体的外部设置有显示屏,所述处理器和所述存储器位于所述壳体内部,所述摄像头处于工作状态时至少部分外露于所述壳体,所述战斗部位于所述壳体内部或外部;所述装置还包括第二控制模块,所述第二控制模块用于:接收所述摄像头发送的第二图像信息,所述第二图像信息用于显示所述飞行器的周围环境;根据所述第二图像信息控制所述显示屏的显示内容,以使所述壳体实现隐身功能。
在一些可选的实施例中,所述显示屏包括多个显示单元;所述第二控制模块还用于:根据所述第二图像信息,获取每个显示单元对应的显示内容并控制所述每个显示单元显示对应的显示内容。
第三方面,本申请提供了一种飞行器,所述飞行器包括壳体、处理器、存储器、摄像头和战斗部,所述处理器和所述存储器位于所述壳体内部,所述摄像头处于工作状态时至少部分外露于所述壳体,所述战斗部位于所述壳体内部或外部;所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现上述任一项方法的步骤。
在一些可选的实施例中,所述摄像头包括光学摄像头和红外摄像头。该技术方案的有益效果在于,通过光学摄像头和红外摄像头两个摄像头分别感应可见光和红外线,获取更多视觉信息。
在一些可选的实施例中,所述壳体的外部设置有隐身涂层。该技术方案的有益效果在于,通过隐身涂层来实现飞行器的隐身功能。
在一些可选的实施例中,所述飞行器还包括用于信号干扰的电子吊舱。该技术方案的有益效果在于,通过电子吊舱的形式进行信号干扰,节省飞行器的内部空间。
在一些可选的实施例中,所述飞行器是无人机。第四方面,本申请提供了一种计算机可读存储介质,存储有计算机程序,所述计算机程序被处理器执行时实现上述任一项方法的步骤。
附图说明
下面结合附图和实施例对本申请进一步说明。
图1是本申请实施例提供的一种飞行器的结构示意图;
图2是本申请实施例提供的一种飞行器的控制方法的流程示意图;
图3是本申请实施例提供的一种确定第一攻击目标的流程示意图;
图4是本申请实施例提供的一种飞行器的控制方法的流程示意图;
图5是本申请实施例提供的一种飞行器的控制方法的流程示意图;
图6是本申请实施例提供的一种飞行器的控制装置的结构示意图;
图7是本申请实施例提供的一种飞行器的控制装置的结构示意图;
图8是本申请实施例提供的一种飞行器的控制装置的结构示意图;
图9是本申请实施例提供的一种用于实现飞行器的控制方法的程序产品的结构示意图。
具体实施方式
下面,结合附图以及具体实施方式,对本申请做进一步描述,需要说明的是,在不相冲突的前提下,以下描述的各实施例之间或各技术特征之间可以任意组合形成新的实施例。
参见图1,本申请实施例提供了一种飞行器,其中,飞行器可以是有人驾驶的飞行器,也可以是应用无人驾驶技术的飞行器,例如无人机、无人直升机等。
所述飞行器包括壳体101、处理器102、存储器103、摄像头104和战斗部105,所述处理器102和所述存储器103位于所述壳体101内部,所述摄像头104处于工作状态时至少部分外露于所述壳体101,所述战斗部105位于所述壳体101内部或外部;所述存储器103存储有计算机程序,所述处理器102执行所述计算机程序时实现飞行器的控制方法的步骤。下面将首先介绍飞行器的硬件结构,飞行器的控制方法将在下文中进行说明。在具体实施中,可以根据实际应用中的需求确定飞行器的旋翼数量,例如可以采用单旋翼、四旋翼、六旋翼或者八旋翼。在实际应用中,可以优先选用低噪声的四轴四旋翼飞行器。
所述战斗部105是飞行器搭载的可抛弃的高爆战斗部,例如是照明弹、高爆炸弹或者催泪弹。在具体实施中,每个飞行器可以搭载一个或多个战斗部105,对每个战斗部105的控制可以单独进行,也可以同时控制多个战斗部105攻击同一攻击目标或者多个攻击目标。
在一个实际应用中,所述摄像头104可以包括光学摄像头和红外摄像头。通过光学摄像头和红外摄像头两个摄像头分别感应可见光和红外线,获取更多视觉信息。在具体实施中,光学摄像头和红外摄像头可以采用全景摄像头,由此可以观察到飞行器各个角度的周围环境。
在一个实际应用中,所述壳体101的外部可以设置有隐身涂层。其中,隐身涂层采用隐身涂料,隐身涂料能吸收雷达波(雷达反射截面小),通过隐身涂层来实现飞行器的隐身功能。
或者,所述壳体101的外部可以设置有显示屏106,所述显示屏106可以设置于所述壳体101的以下至少一个位置:上表面、下表面和侧面。在具体实施中,飞行器可以通过摄像头104采集周围环境信息,以此来控制显示屏106的显示内容,使飞行器产生类似“变色龙”的效果,能够根据周围环境改变飞行器的外部显示,实现飞行器的隐身功能。显示屏106例如是LED显示屏,即,在壳体101的外部使用LED外层,通过摄像头104和计算机视觉算法来感知周围环境的颜色、亮度、饱和度、对比度等视觉参数,并根据感知到的视觉参数通过LED外层模拟周围环境的视觉效果,以隐身涂层之外的另一种方式达到隐身效果,从而加强突袭的可能。
所述显示屏106可以包括1个或多个显示单元。每个显示单元可以显示相同的显示内容,或者,每个显示单元可以显示不同的显示内容。
在一个实际应用中,所述飞行器还可以包括用于信号干扰的信号干扰装置。信号干扰装置例如可以进行电磁干扰或者声波干扰,用途是干扰敌方飞行器等电子设备,使其电子控制系统失灵从而无法工作。其中,信号干扰装置例如是电子吊舱107。通过电子吊舱107的形式进行信号干扰,节省飞行器的内部空间。
除了战斗部105和电子吊舱107之外,飞行器还可以搭载其他任务设备,提供多种用途,例如侦查、攻击、干扰和运输。
为了提高飞行器的充电效率,可以采用轻型高续航快充电池。
在未来,当激光武器的体积大幅缩小到能被无人机挂载,核动力电池的电量能够更大,放射性被进一步降低,体积更小时,无人机的打击目标可以增加到包括巡航导弹、直升机和地面的轻装甲设施(雷达、机库、油库等),功能延伸至拦截中低空制导导弹,在单次任务中,能多次攻击敌方多个目标,由此大大节省战争成本,甚至可能改变未来的战争形态,即更加偏向无人化的战争。
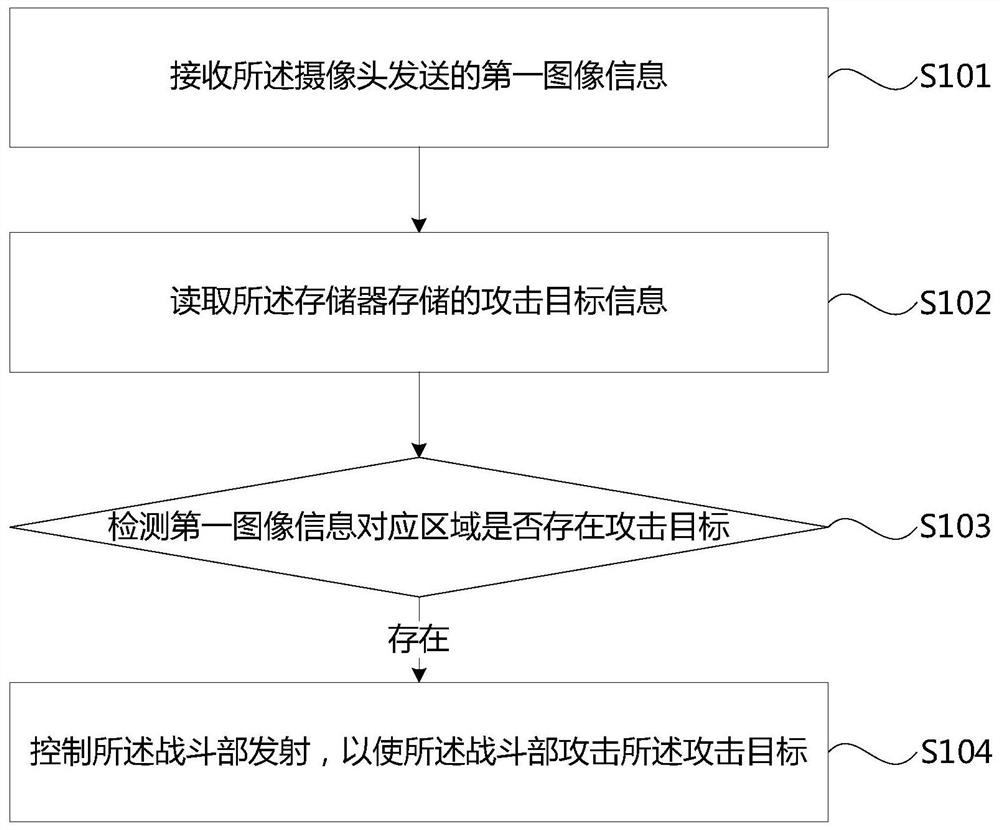
参见图2,本申请实施例还提供了一种飞行器的控制方法,飞行器例如是上述实施例中的飞行器。所述方法应用于设置在所述飞行器上的处理器,所述方法包括步骤S101~S104。
步骤S101:接收所述摄像头发送的第一图像信息。第一图像信息例如可以包括图片和/或视频。
步骤S102:读取所述存储器存储的攻击目标信息。存储器上还可以存储我方目标信息,用以使处理器更好地区分敌我双方。
步骤S103:根据所述第一图像信息和所述攻击目标信息,检测所述第一图像信息对应的区域是否存在攻击目标。具体而言,可以使用目标检测算法检测所述第一图像信息对应的区域是否存在攻击目标。其中,攻击目标例如可以包括人员、车辆、(敌方)飞行器、雷达、建筑物和掩体中的一种或多种。
步骤S104:若存在,则控制所述战斗部发射,以使所述战斗部攻击所述攻击目标。
在一个实际应用中,参见图3,所述步骤S104可以包括步骤S201~S203。
步骤S201:若存在,则检测所述第一图像信息对应的区域中的攻击目标的数量是否大于1个。
步骤S202:若大于1个,则从所有攻击目标中确定第一攻击目标。
其中,所述从所有攻击目标中确定第一攻击目标的步骤,可以包括:确定所有攻击目标中距离所述飞行器最近的攻击目标作为所述第一攻击目标;或者,确定所有攻击目标中面积或体积最大的攻击目标作为所述第一攻击目标;或者,确定所有攻击目标中速度最低的攻击目标作为所述第一攻击目标。在选择优先攻击的目标时,可以考虑距离、打击面积、速度等因素,将距离最近的、面积或体积最大的、速度最低的攻击目标之一作为优先攻击的对象,更加符合实际应用中的需求。
或者,所述从所有攻击目标中确定第一攻击目标的步骤,可以包括:根据所有攻击目标中每个攻击目标的优先级参数,从所有攻击目标中确定所述第一攻击目标,所述每个攻击目标的优先级参数由以下至少一个参数确定:所述每个攻击目标与所述飞行器之间的距离、所述每个攻击目标的面积或体积、所述每个攻击目标的速度。使用优先级参数综合考虑多种影响因素用以决策优先打击的攻击目标,更加符合实际应用中的需求。
步骤S203:控制所述战斗部发射,以使所述战斗部攻击所述第一攻击目标。
由此,当检测到不止1个攻击目标时,可以选择性地攻击其中一个攻击目标。
在一个实际应用中,参见图4,所述方法还可以包括步骤S105~S106。
步骤S105:检测所述飞行器是否满足回收条件,所述回收条件包括以下至少一种:未被激光锁定、未被干扰、未被黑客入侵、未被追踪和动力足够飞行至回收地点。其中,未被干扰包括未被电磁干扰和/或未被声波干扰。是否被追踪可以通过摄像头采集周围环境信息来判断。
步骤S106:若满足,则控制所述飞行器飞行至所述回收地点。对飞行器进行回收,解决现有技术的飞行器无法回收再利用、不够经济的问题,降低使用成本;在回收之前进行回收条件的检测,对满足回收条件的飞行器进行回收,提升了飞行器及回收地点的安全性。
在一个实际应用中,所述步骤S106可以包括:若满足,则控制所述信号干扰装置打开后,控制所述飞行器飞行至所述回收地点。为飞行器增加了信号干扰功能,提高飞行器回收过程中的安全性。
在一个实际应用中,参见图5,所述方法还可以包括步骤S107~S108。
步骤S107:接收所述摄像头发送的第二图像信息,所述第二图像信息用于显示所述飞行器的周围环境。例如,当飞行器在空中飞行时,第二图像信息可以是当前位置仰视天空的图像信息。当飞行器停留在屋顶时,第二图像信息可以是俯视或者侧视屋顶的图像信息。
步骤S108:根据所述第二图像信息控制所述显示屏的显示内容,以使所述壳体实现隐身功能。例如,当飞行器在空中飞行时,飞行器底部的显示屏的显示内容可以是天空的静态图片、动态图片或者视频。当飞行器停留在屋顶时,飞行器侧面的显示屏的显示内容可以是与屋顶颜色、纹理相同或者相似的图片。当飞行器停留在树上时,飞行器上表面、下表面和侧面的显示屏的显示内容可以是当前树木、树枝、树叶的静态图片、动态图片或者视频。
在一个实际应用中,所述步骤S108可以包括:根据所述第二图像信息,获取每个显示单元对应的显示内容并控制所述每个显示单元显示对应的显示内容。多个显示单元可能分别位于飞行器的不同位置,例如上表面、侧面和下表面,使不同位置的显示单元显示不同的显示内容,增强飞行器的伪装效果,提升飞行器的安全性。
在飞行器上设置处理器,对摄像头采集到的图像信息进行处理,检测区域内是否存在攻击目标,如果存在则自动控制战斗部对攻击目标进行攻击。上述过程不需要人工参与,解决了人工手动控制的问题;且由于处理器设置在飞行器上,在飞行器本地完成图像处理并生成对战斗部的控制指令,因此也不需要将图像信息回传到地面基站的后台服务器并由后台服务器进行图像处理以及返回控制指令,解决了现有技术的飞行器无法自主进行图像处理和控制战斗部参与战斗的问题;不依赖后方士兵或者驾驶人员通过摄像头进行人工肉眼识别,降低出错率,更容易被前线士兵使用;另外,控制战斗部发射而非自杀式袭击,飞行器可以重复利用、多次发动攻击,大大节约成本;由于不需要远程控制,大大减少了飞行器与后台服务器的交互次数,降低了飞行器在通信过程中被发现的可能性,提升了飞行器的安全性;提供更加丰富的攻击手段,减少了其他武器的研发经费,提供更多元的战场价值(例如侦察、进攻、防御和心理战)。
例如飞行器可以在半径为3公里的范围内飞行,自动搜寻和精确打击隐藏在掩体、遮蔽物后的敌方人员,或干扰敌方飞行器。整个过程中,飞行器可以不依赖人工操纵,减少人为失误,适合城市巷战和高海拔等能见度低的或较为封闭的区域,减少己方人员损失,加快占领重要区域。
参见图6,本申请实施例还提供了一种飞行器的控制装置,其具体实现方式与上述飞行器的控制方法的实施例中记载的实施方式、所达到的技术效果一致,部分内容不再赘述。
所述飞行器包括处理器、存储器、摄像头和战斗部,所述处理器包括所述装置,所述装置包括:接收模块201,用于接收所述摄像头发送的第一图像信息;读取模块202,用于读取所述存储器存储的攻击目标信息;检测模块203,用于根据所述第一图像信息和所述攻击目标信息,检测所述第一图像信息对应的区域是否存在攻击目标;第一控制模块204,用于若存在,则控制所述战斗部发射,以使所述战斗部攻击所述攻击目标。
在一个实际应用中,所述第一控制模块204可以用于:若存在,则检测所述第一图像信息对应的区域中的攻击目标的数量是否大于1个;若大于1个,则从所有攻击目标中确定第一攻击目标;控制所述战斗部发射,以使所述战斗部攻击所述第一攻击目标。
在一个实际应用中,所述第一控制模块204还可以用于:确定所有攻击目标中距离所述飞行器最近的攻击目标作为所述第一攻击目标;或者,确定所有攻击目标中面积或体积最大的攻击目标作为所述第一攻击目标;或者,确定所有攻击目标中速度最低的攻击目标作为所述第一攻击目标。
在一个实际应用中,所述第一控制模块204还可以用于:根据所有攻击目标中每个攻击目标的优先级参数,从所有攻击目标中确定所述第一攻击目标,所述每个攻击目标的优先级参数由以下至少一个参数确定:所述每个攻击目标与所述飞行器之间的距离、所述每个攻击目标的面积或体积、所述每个攻击目标的速度。
在一个实际应用中,参见图7,所述装置还可以包括回收模块205,所述回收模块205用于:检测所述飞行器是否满足回收条件,所述回收条件包括以下至少一种:未被激光锁定、未被干扰、未被黑客入侵、未被追踪和动力足够飞行至回收地点;若满足,则控制所述飞行器飞行至所述回收地点。
在一个实际应用中,所述飞行器还包括信号干扰装置;所述回收模块205还可以用于:若满足,则控制所述信号干扰装置打开后,控制所述飞行器飞行至所述回收地点。
在一个实际应用中,参见图8,所述飞行器还包括壳体,所述壳体的外部设置有显示屏,所述处理器和所述存储器位于所述壳体内部,所述摄像头处于工作状态时至少部分外露于所述壳体,所述战斗部位于所述壳体内部或外部;所述装置还可以包括第二控制模块206,所述第二控制模块206用于:接收所述摄像头发送的第二图像信息,所述第二图像信息用于显示所述飞行器的周围环境;根据所述第二图像信息控制所述显示屏的显示内容,以使所述壳体实现隐身功能。
在一个实际应用中,所述显示屏包括多个显示单元;所述第二控制模块206还可以用于:根据所述第二图像信息,获取每个显示单元对应的显示内容并控制所述每个显示单元显示对应的显示内容。
本申请实施例还提供了一种计算机可读存储介质,该计算机可读存储介质用于存储计算机程序,所述计算机程序被执行时实现本申请实施例中飞行器的控制方法的步骤,其具体实现方式与上述飞行器的控制方法的实施例中记载的实施方式、所达到的技术效果一致,部分内容不再赘述。
图9示出了本实施例提供的用于实现上述方法的程序产品300,其可以采用便携式紧凑盘只读存储器(CD-ROM)并包括程序代码,并可以在终端设备,例如个人电脑上运行。然而,本发明的程序产品300不限于此,在本文件中,可读存储介质可以是任何包含或存储程序的有形介质,该程序可以被指令执行系统、装置或者器件使用或者与其结合使用。程序产品300可以采用一个或多个可读介质的任意组合。可读介质可以是可读信号介质或者可读存储介质。可读存储介质例如可以为但不限于电、磁、光、电磁、红外线、或半导体的系统、装置或器件,或者任意以上的组合。可读存储介质的更具体的例子(非穷举的列表)包括:具有一个或多个导线的电连接、便携式盘、硬盘、随机存取存储器(RAM)、只读存储器(ROM)、可擦式可编程只读存储器(EPROM或闪存)、光纤、便携式紧凑盘只读存储器(CD-ROM)、光存储器件、磁存储器件、或者上述的任意合适的组合。
计算机可读存储介质可以包括在基带中或者作为载波一部分传播的数据信号,其中承载了可读程序代码。这种传播的数据信号可以采用多种形式,包括但不限于电磁信号、光信号或上述的任意合适的组合。可读存储介质还可以是可读存储介质以外的任何可读介质,该可读介质可以发送、传播或者传输用于由指令执行系统、装置或者器件使用或者与其结合使用的程序。可读存储介质上包含的程序代码可以用任何适当的介质传输,包括但不限于无线、有线、光缆、RF等等,或者上述的任意合适的组合。可以以一种或多种程序设计语言的任意组合来编写用于执行本发明操作的程序代码,程序设计语言包括面向对象的程序设计语言诸如Java、C++等,还包括常规的过程式程序设计语言诸如“C”语言或类似的程序设计语言。程序代码可以完全地在用户计算设备上执行、部分地在用户设备上执行、作为一个独立的软件包执行、部分在用户计算设备上部分在远程计算设备上执行、或者完全在远程计算设备或服务器上执行。在涉及远程计算设备的情形中,远程计算设备可以通过任意种类的网络,包括局域网(LAN)或广域网(WAN),连接到用户计算设备,或者,可以连接到外部计算设备(例如利用因特网服务提供商来通过因特网连接)。
本申请从使用目的上,效能上,进步及新颖性等观点进行阐述,其设置有的实用进步性,已符合专利法所强调的功能增进及使用要件,本申请以上的说明及附图,仅为本申请的较佳实施例而已,并非以此局限本申请,因此,凡一切与本申请构造,装置,特征等近似、雷同的,即凡依本申请专利申请范围所作的等同替换或修饰等,皆应属本申请的专利申请保护的范围之内。
- 飞行器控制方法、装置、飞行器及计算机可读存储介质
- 飞行器的控制方法、装置、飞行器及计算机可读存储介质