一种交叉式治具搬运开盖机构及搬运开盖方法
文献发布时间:2023-06-19 10:41:48
技术领域
本发明涉及治具搬运技术,尤其涉及一种交叉式治具搬运开盖机构及搬运开盖方法。
背景技术
在如今自动化生产行业当中,治具的运用范围十分广泛,许多需要组装的零件因为外形、材质等因素都需要治具辅助固定,才能实现自动化组装。借助治具,零件可以随治具自动流转、精确定位,实现精加工。
现实情况中,如图1所示,有种治具1是由本体11和盖板12组成,本体11两侧铰接有把手13,把手13上翻时固定住盖板12,把手13向两侧打开后才能取下盖板12,如图2所示。这种治具1在产品组装完成后,需要打开盖板12才能取料。因此,如何提出一种能够同时完成治具搬运和开盖的搬运机构,就成为本领域技术人员亟待解决的问题。
发明内容
本发明的目的在于提供一种能够在移载治具的同时打开治具盖板的交叉式治具搬运开盖机构。
本发明的另一目的在于提供一种基于上述机构的高效的治具搬运开盖方法。
以下给出一个或多个方面的简要概述以提供对这些方面的基本理解。此概述不是所有构想到的方面的详尽综览,并且既非旨在指认出所有方面的关键性或决定性要素亦非试图界定任何或所有方面的范围。其唯一的目的是要以简化形式给出一个或多个方面的一些概念以为稍后给出的更加详细的描述之序。
根据本发明的一方面,提供了一种交叉式治具搬运开盖机构,设置于取治具位和放治具位上方,包括对称设置的左工位搬运机构和右工位搬运机构,所述左工位搬运机构和右工位搬运机构均包括X向驱动组件、Y向驱动组件、Z向驱动组件、治具搬运组件和治具盖板搬运组件,所述X向驱动组件、Y向驱动组件、Z向驱动组件相互传动配合构成三轴平台,所述治具搬运组件和治具盖板搬运组件设置于所述三轴平台的活动座上。
在一实施例中,该交叉式治具搬运开盖机构的所述治具搬运组件包括夹治具气缸、滑轨、两个滑块和一对夹爪,所述夹治具气缸和滑轨沿X向设置于所述活动座上,所述两个滑块配接于所述滑轨上,所述两个滑块分别与所述夹治具气缸的两个气爪连接,所述一对夹爪分别设置于所述两个滑块上。
在一实施例中,该交叉式治具搬运开盖机构的所述夹爪包括呈T字形相连的竖向杆和横向杆,所述竖向杆与所述滑块连接,所述横向杆的侧面设置有与治具侧面槽孔匹配的卡头。
在一实施例中,该交叉式治具搬运开盖机构的所述治具盖板搬运组件包括X向移载组件、Z向升降组件、治具盖板吸盘组件和治具开盖组件,所述X向移载组件设置于所述活动座上,所述Z向升降组件与所述X向移载组件传动配合,所述治具盖板吸盘组件与所述Z向升降组件传动连接,所述治具开盖组件设置于所述治具盖板吸盘组件的下表面。
在一实施例中,该交叉式治具搬运开盖机构的所述X向移载组件包括X向导轨和治具盖板移载气缸,所述Z向升降组件滑动配接于所述X向导轨上并与所述治具盖板移载气缸传动连接。
在一实施例中,该交叉式治具搬运开盖机构的所述Z向升降组件包括治具盖板升降气缸和Z向导轨,所述治具盖板吸盘组件滑动配接于所述Z向导轨上并与所述治具盖板升降气缸传动连接。
在一实施例中,该交叉式治具搬运开盖机构的所述治具盖板吸盘组件包括水平设置的固定板以及设置于所述固定板下表面的两组治具盖板吸盘,所述两组治具盖板吸盘对称地设置于所述固定板沿X向的两端位置。
在一实施例中,该交叉式治具搬运开盖机构的所述治具开盖组件包括夹爪气缸和两个活动块,所述夹爪气缸设置于所述两组治具盖板吸盘之间,所述夹爪气缸的开合方向沿Y向,所述两个活动块分别与所述夹爪气缸的两个夹爪连接。
在一实施例中,该交叉式治具搬运开盖机构的所述活动块的端部设置有滚轮。
根据本发明的另一方面,还提供了一种交叉式治具搬运开盖方法,包括以下步骤:左工位搬运机构和右工位搬运机构交替将治具从取治具位搬运到放治具位,在搬运过程中,左工位搬运机构和右工位搬运机构的X向驱动组件和Y向驱动组件的驱动方向相反;
其中,左工位搬运机构或右工位搬运机构具体搬运过程为:
X向驱动组件和Y向驱动组件带动治具搬运组件移动到取治具位上方,Z向驱动组件带动治具搬运组件下降,治具搬运组件夹取治具,Z向驱动组件带动治具搬运组件上升;
X向驱动组件和Y向驱动组件带动治具搬运组件移动到放治具位上方,在移动过程中,治具盖板搬运组件将治具把手打开并将治具盖板搬离治具;
到达放治具位上方后,Z向驱动组件下降,治具搬运组件和治具盖板搬运组件将治具本体和盖板放到放治具位。
本发明实施例的有益效果是:通过设置左工位搬运机构和右工位搬运机构,能够左右工位交替运行;通过在每个搬运机构均设置治具搬运组件和治具盖板搬运组件,能够在移载治具的同时打开治具盖板,从而能够最大效率地实现治具搬运和开盖工作,工作效率高且占用空间小。
附图说明
为了更清楚地说明本发明实施例的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本发明的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
在结合以下附图阅读本公开的实施例的详细描述之后,能够更好地理解本发明的上述特征和优点。在附图中,各组件不一定是按比例绘制,并且具有类似的相关特性或特征的组件可能具有相同或相近的附图标记。
图1是治具来料的结构示意图;
图2是治具盖板拆下后的示意图;
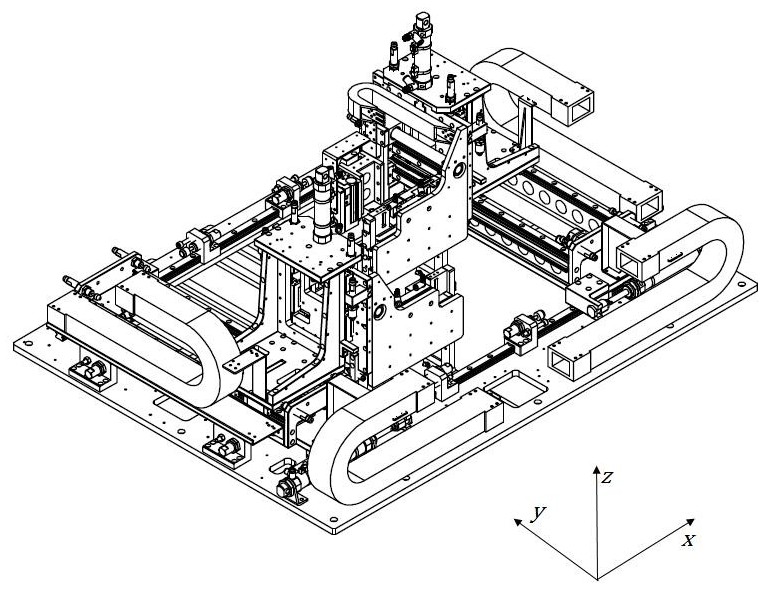
图3是本发明实施例的整体结构示意图;
图4是本发明实施例的正面视图;
图5是本发明实施例的俯视图;
图6是本发明实施例的右工位搬运机构示意图;
图7是本发明实施例的治具搬运组件结构示意图;
图8是本发明实施例的治具盖板搬运组件结构示意图;
其中:1-治具;11-本体;12-盖板;13-把手;14-槽孔;2-左工位搬运机构;3-右工位搬运机构;31-X向驱动组件;32-Y向驱动组件;33-Z向驱动组件;34-治具搬运组件;341-夹治具气缸;342-滑轨;343-滑块;344-夹爪;344a-竖向杆;344b-横向杆;344c-卡头;35-治具盖板搬运组件;351-X向移载组件;351a-X向导轨;351b-治具盖板移载气缸;352-Z向升降组件;352a-治具盖板升降气缸;352b-Z向导轨;353-治具盖板吸盘组件;353a-固定板;353b-治具盖板吸盘;354-治具开盖组件;354a-夹爪气缸;354b-活动块;354c-滚轮;36-活动座;4-取治具位;5-放治具位。
具体实施方式
以下结合附图和具体实施例对本发明作详细描述。注意,以下结合附图和具体实施例描述的诸方面仅是示例性的,而不应被理解为对本发明的保护范围进行任何限制。
如图3~图6所示,本发明实施例提供了一种交叉式治具搬运开盖机构。该机构设置于取治具位4和放治具位5上方,包括对称设置的左工位搬运机构2和右工位搬运机构3。由于左工位搬运机构2和右工位搬运机构3结构相同,下面以右工位搬运机构3为例进行具体说明。右工位搬运机构3包括X向驱动组件31、Y向驱动组件32、Z向驱动组件33、治具搬运组件34和治具盖板搬运组件35。其中,X向驱动组件31、Y向驱动组件32、Z向驱动组件33均采用滑块、滑轨和气缸的结构,三者相互传动配合构成三轴平台,治具搬运组件34和治具盖板搬运组件35设置于三轴平台的活动座36上。
具体而言,治具搬运组件34如图7所示,包括夹治具气缸341、滑轨342、两个滑块343和一对夹爪344。夹治具气缸341和滑轨342沿X向设置于活动座36上,两个滑块343配接于滑轨342上且分别与夹治具气缸341的两个气爪连接,一对夹爪344分别设置于两个滑块343上。
夹爪344包括呈T字形相连的竖向杆344a和横向杆344b,竖向杆344a与滑块343连接,横向杆344b的侧面设置有与治具1侧面槽孔14匹配的卡头344c,当夹治具气缸341的气爪合并时,这对夹爪344从两侧卡住治具1,实现对治具1的夹取。
治具盖板搬运组件35如图8所示,包括X向移载组件351、Z向升降组件352、治具盖板吸盘组件353和治具开盖组件354。X向移载组件351设置于三轴平台的活动座36上,Z向升降组件352与X向移载组件351传动配合,治具盖板吸盘组件353与Z向升降组件352传动连接,治具开盖组件354设置于治具盖板吸盘组件353的下表面。
其中,X向移载组件351包括X向导轨351a和治具盖板移载气缸351b,Z向升降组件352滑动配接于X向导轨351a上并与治具盖板移载气缸351b传动连接。Z向升降组件352包括治具盖板升降气缸352a和Z向导轨352b,治具盖板吸盘组件353滑动配接于Z向导轨352b上并与治具盖板升降气缸352a传动连接。
治具盖板吸盘组件353包括水平设置的固定板353a以及设置于固定板353a下表面的两组治具盖板吸盘353b,两组治具盖板吸盘353b对称地设置于固定板353a沿X向的两端位置。
治具开盖组件354包括夹爪气缸354a和两个活动块354b,夹爪气缸354a设置于两组治具盖板吸盘353b之间,夹爪气缸354a的开合方向沿Y向,两个活动块354b分别与夹爪气缸354a的两个夹爪连接。为了减少对把手13的损害,还可在活动块354b的端部设置滚轮354c以实现滚动接触。
在治具1的搬运过程中,X向移载组件351和Z向升降组件352驱动治具盖板吸盘组件353移动至治具1上,治具盖板吸盘353b吸住盖板12,然后治具开盖组件354将把手13向两侧推开,Z向升降组件352带动治具盖板吸盘组件353将盖板12搬离治具本体11。
基于上述交叉式治具搬运开盖机构,本发明实施例还提供了一种交叉式治具搬运开盖方法,包括以下步骤:左工位搬运机构和右工位搬运机构交替将治具从取治具位搬运到放治具位,在搬运过程中,左工位搬运机构和右工位搬运机构的X向驱动组件和Y向驱动组件的驱动方向相反,以确保相互不会碰撞,且能够缩小占用空间。
其中,左工位搬运机构或右工位搬运机构具体搬运过程为:
X向驱动组件和Y向驱动组件带动治具搬运组件移动到取治具位,Z向驱动组件带动治具搬运组件下降,治具搬运组件夹取治具,Z向驱动组件带动治具搬运组件上升;
X向驱动组件和Y向驱动组件带动治具搬运组件移动到放治具位上方,在移动过程中,治具盖板搬运组件将治具把手打开并将治具盖板搬离治具;
到达放治具位上方后,Z向驱动组下降,治具搬运组件和治具盖板搬运组件将治具本体和盖板放到放治具位。
容易理解地,本申请所提供的机构及方法不仅适用于图1和图2中所示的治具1,凡此类需要开盖的治具的搬运,均可适用本机构和方法。
综上所述,本发明提供的交叉式治具搬运开盖机构及搬运方法,能够在移载治具的同时打开治具盖板,左右两套机构交叉工作,效率高且占用空间小。
本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。
尽管为使解释简单化将上述方法图示并描述为一系列动作,但是应理解并领会,这些方法不受动作的次序所限,因为根据一个或多个实施例,一些动作可按不同次序发生和/或与来自本文中图示和描述或本文中未图示和描述但本领域技术人员可以理解的其他动作并发地发生。
提供对本公开的先前描述是为使得本领域任何技术人员皆能够制作或使用本公开。对本公开的各种修改对本领域技术人员来说都将是显而易见的,且本文中所定义的普适原理可被应用到其他变体而不会脱离本公开的精神或范围。由此,本公开并非旨在被限定于本文中所描述的示例和设计,而是应被授予与本文中所公开的原理和新颖性特征相一致的最广范围。
以上所述仅为本申请的较佳实例而已,并不用以限制本申请,凡在本申请的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本申请保护的范围之内。
- 一种交叉式治具搬运开盖机构及搬运开盖方法
- 一种交叉式治具搬运开盖机构及搬运开盖方法