一种穿戴式多功能颈椎康复动力外骨骼控制系统
文献发布时间:2023-06-19 12:16:29
技术领域
本申请属于人体康复辅具领域,具体涉及一种穿戴式多功能颈椎康复动力外骨骼控制系统。
背景技术
颈部是人体几何特性和运动特性最为复杂,以及最易受到伤害的部分之一。随着人们生活习惯及工作方式的改变,颈椎疾病发病率逐年增高。同时,伴随着并联机构、控制技术以及人机交互等的不断研究与发展,颈椎外骨骼逐渐成为康复领域的研究热点。
现存的颈椎康复外骨骼大多是支撑固定或牵引的单一康复训练,有两种形式,其一是与颈椎硬性接触,但颈椎容易因硬性支撑无法进行适应性调节而损伤;颈椎的支撑点会存在无法紧密贴合或而产生支撑不到位;对颈椎的稳定和纵向张力缺乏足够张力等问题都会影响颈椎的保护与治疗。另外一个是充气型,但其存在对颈椎的支撑疗效无法精确控制,且康复功能较少等问题。
随着人机交互技术与康复医学的发展,本领域的技术人员致力于开发可穿戴式的颈椎康训练器,但目前的研究成果依然存在康复训练功能单一、训练范围小、训练针对性不强等缺陷。
发明内容
本申请提出了一种穿戴式多功能颈椎康复动力外骨骼控制系统,控制模块通过通讯模块接收人机交互模块、姿态位置采集模块和压力采集模块传输的数据,生成电机驱动模块的控制指令,驱动推杆电机产生姿态控制动作,实现在全关节活动范围的主动阻抗模式和被动牵引模式下的多种牵引训练。为实现上述目的,本申请提供了如下方案:
一种穿戴式多功能颈椎康复动力外骨骼控制系统,包括:控制模块、人机交互模块、姿态位置采集模块、压力采集模块、电机驱动模块、推杆电机和通讯模块;
所述控制模块通过所述通讯模块分别与所述人机交互模块、所述姿态位置采集模块、所述压力采集模块和所述电机驱动模块连接;所述推杆电机与所述电机驱动模块连接;
所述人机交互模块用于接收用户指令,生成交互数据并发送至所述控制模块;所述用户指令包括训练模式和训练速度;
所述姿态位置采集模块包括姿态模块和位置模块,所述姿态模块用于采集人体颈椎位置的姿态信号,生成姿态数据发送至所述控制模块,所述位置模块用于采集所述推杆电机的位置信号,生成推杆位置数据发送至所述控制模块;
所述压力采集模块用于采集所述推杆电机的推杆表面的压力信息,生成压力数据并发送至所述控制模块;
所述控制模块用于接收所述交互数据、所述姿态数据、所述推杆位置数据和所述压力数据,生成动作控制信号发送至所述电机驱动模块;
所述电机驱动模块用于根据所述动作控制信号,驱动所述推杆电机产生姿态控制动作;
所述驱动电机位于穿戴式多功能颈椎康复动力外骨骼控制系统内,所述穿戴式多功能颈椎康复动力外骨骼控制系统在所述姿态控制动作的牵引下对人的颈椎进行康复训练。
优选的,所述通讯模块包括:UART通信模块、WIFI通讯模块和Modbus通信模块;所述WIFI通讯模块用于所述人机交互模块与所述控制模块之间的通信;所述UART通信模块用于所述姿态位置采集模块与所述控制模块之间的通信;所述UART通信模块还用于所述压力采集模块与所述控制模块之间的通信;所述Modbus通信模块,用于所述电机驱动模块与所述控制模块之间的通信。
优选的,所述人机交互模块包括手机APP模块、摇杆模块和按键模块;所述手机APP模块、所述摇杆模块和所述按键模块用于选择所述训练模式和所述训练速度。优选的,所述姿态模块包括陀螺仪单元,用于采集所述姿态信号;所述位置模块包括电位计单元,用于采集所述推杆电机的位置信号;
所述姿态信号包括但不限于所述姿态模块所处位置的偏航角、偏航角加速度信号、横滚角、横滚角加速度信号、俯仰角、俯仰角加速度信号。
优选的,所述动作控制信号包括交互控制信号、位置控制信号和阻抗控制信号;所述控制模块包括交互指令单元、运算指令单元、压力调节单元和指令输出单元;所述交互指令单元用于处理所述交互数据,生成交互控制信号;所述运算指令单元用于根据所述姿态数据和所述推杆位置数据,生成位置控制信号;所述压力调节单元用于根据所述压力信息,生成阻抗控制信号;所述指令输出单元用于将所述交互控制信号、所述位置控制信号、所述阻抗控制信号通过所述通讯模块传输至所述电机驱动模块。
优选的,所述位置控制信号的生成方法包括:根据所述姿态数据和所述推杆位置数据,得到所述推杆电机的位置分解,通过对所述位置分解进行运动学逆解计算,生成所述位置控制信号;所述阻抗控制信号的生成方法包括:所述运算指令单元对所述压力信息进行动力学正逆解计算,得到所述阻抗控制信号。
优选的,所述姿态控制动作包括被动牵引动作和主动阻抗动作;所述电机驱动模块包括阻抗控制器和位置速度串级PID控制器;所述阻抗控制器用于根据所述阻抗控制信号生成阻抗调节信号;所述位置速度串级PID控制器用于根据所述位置控制信号驱动所述推杆电机产生所述被动牵引动作;所述位置速度串级PID控制器还用于根据所述位置控制信号和所述阻抗调节信号驱动所述推杆电机产生所述主动阻抗动作。
优选的,所述训练模式包括主动阻抗模式和被动牵引模式;所述主动阻抗模式为根据所述主动阻抗动作进行训练,所述主动阻抗动作包括竖直牵引、前屈后伸和左右旋转;所述被动牵引模式为根据所述被动牵引动作进行训练。
本申请的有益效果为:
本申请公开了一种穿戴式多功能颈椎康复动力外骨骼控制系统,控制模块通过通讯模块接收人机交互模块、姿态位置采集模块和压力采集模块传输的数据,生成电机驱动模块的控制指令,驱动推杆电机产生姿态控制动作,实现主动阻抗模式和被动牵引模式下的多种牵引训练,且通过人机交互模块使得人机交互性大幅提升,本申请功能多样,兼具颈椎增强与康复训练功能,可实现在全关节活动范围内的颈部牵引运动训练,通过对颈部肌肉进行定向的阻抗训练和多方向的肌力训练,增强颈椎的稳定性。
附图说明
为了更清楚地说明本申请的技术方案,下面对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本申请的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
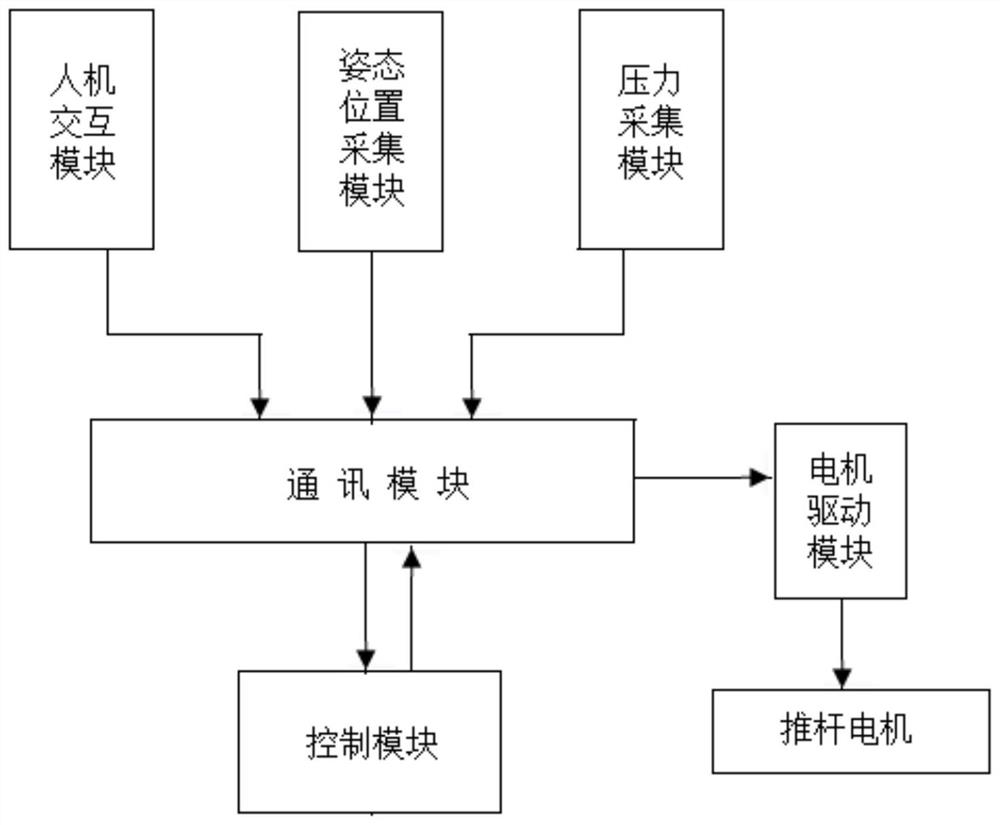
图1为本申请实施例中的穿戴式多功能颈椎康复动力外骨骼控制系统的结构示意图;
图2为本申请实施例中的穿戴式多功能颈椎康复动力外骨骼控制系统的装置示意图;
图3为本申请实施例中电机驱动模块的结构和控制示意图;
图4为本申请实施例的训练模式示意图;
图5为使用本申请实施例中的穿戴式多功能颈椎康复动力外骨骼控制系统的进行康复训练流程示意图。
具体实施方式
下面将结合本申请实施例中的附图,对本申请实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本申请一部分实施例,而不是全部的实施例。基于本申请中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本申请保护的范围。
为使本申请的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本申请作进一步详细的说明。
如图1-2所示,为本申请公开的一种穿戴式多功能颈椎康复动力外骨骼控制系统,包括:控制模块、人机交互模块、姿态位置采集模块、压力采集模块、电机驱动模块、推杆电机和通讯模块;控制模块通过通讯模块分别与人机交互模块、姿态位置采集模块、压力采集模块和电机驱动模块连接;推杆电机与电机驱动模块连接。
人机交互模块用于接收使用者指令,生成交互数据并发送至控制模块。在本实施例中,采用型号为STM32F407ZGT6的单片机作为核心处理单元。使用者在穿戴本系统后,可通过人机交互模块控制系统的运动模式;在本实施例中,使用者可选择的训练模式包括主动抗阻模式以及被动牵引模式,被动牵引模式又分为低速、中速、高速三种速度模式,也可以在主动抗阻模式中调整阻力大小,并给出建议数值。人机交互模块还包括颈椎评估,包括椎间孔挤压测试、椎间孔分离测试等。人机交互模块可选装置很多,例如手机APP模块、摇杆模块、按键模块,以及遥控模块和显示模块等,均可作为人机交互的终端模块使用,实现训练模式选择、速度调节、力度调节、数据反馈等功能。还可以设置上位机类装置,供专业技术人员、职业医师、护士进行专业操作。
姿态位置采集模块包括姿态模块和位置模块,在本实施例中,姿态模块通过型号为LPMS-ME1的陀螺仪芯片采集姿态信号,姿态信号包括但不限于陀螺仪所处位置的偏航角及角加速度信号、横滚角及角加速度信号、俯仰角及角加速度信号,姿态模块将上述姿态信号转换成姿态数据发送至控制模块;如图2所示,陀螺仪位于枕骨支撑组件的中间位置,对应人体颈椎位置。位置模块通过推杆电机内部的电位计单元采集推杆电机的位置信号;生成推杆位置数据并发送至控制模块。
压力采集模块经过运放采集各个推杆电机上表面压力采集装置所受的压力信息,生成压力数据并发送至控制模块。
在本实施例中,控制模块采用型号为STM32F407ZGT6主控芯片,通过交互指令单元、运算指令单元、压力调节单元接收上述交互数据、姿态数据、推杆位置数据和压力数据,生成动作控制信号,通过指令输出单元发送至电机驱动模块;动作控制信号包括交互控制信号、位置控制信号和阻抗控制信号。
其中,交互指令单元用于处理人机交互模块产生的交互数据,生成交互控制信号;运算指令单元用于根据姿态位置采集模块产生的姿态数据和推杆位置数据,得到推杆电机的位置分解,通过对位置分解进行运动学逆解计算,生成位置控制信号,用于被动牵引模式下的牵拉训练。压力调节单元用于根据压力信息,进行动力学正逆解计算,生成阻抗控制信号,用于主动抗阻模式下阻抗控制器的调节。最后由指令输出单元将上述交互控制信号、位置控制信号、阻抗控制信号通过通讯模块传输至电机驱动模块。
在本实施例中,控制模块中还包括卡尔曼滤波单元,利用卡尔曼滤波的预测功能对人体的运动意图进行预测,从而解决电机运转滞后于人体的运动意图,且可修正压力采集装置与陀螺仪等产生的测量误差。
在本实施例中,控制模块中还包括供电单元,采用3.3V电压供电。
在本实施例中,电机驱动模块采用型号为AQMD2410NS的芯片,用于根据动作控制信号,驱动推杆电机产生姿态控制动作,帮助病患进行康复牵引。在本实施例中,姿态控制动作包括被动牵引动作和主动阻抗动作,相应的,电机驱动模块包括阻抗控制器和位置速度串级PID控制器;如图3所示,位置速度串级PID控制器和推杆电机的位置速度信号构成内环,产生被动牵引动作;阻抗控制器和推杆电机上的压力信号构成外环,生成阻抗调节信号;内环的控制用于被动牵引模式,内外环的混合控制用于主动抗阻模式,从而实现了精准柔顺的控制效果。在本实施例中,共使用了6个推杆电机,分别成对分布于背部、肩部、下颌部,采用12V电压供电。
相对应的,如图4所示,在本实施例中,训练模式包括主动阻抗模式和被动牵引模式;主动阻抗模式为根据主动阻抗动作进行训练,主动阻抗动作包括竖直牵引、前屈后伸和左右旋转,在进行前屈后伸以及左右旋转动作之前需先进行竖直牵引,牵引过程中用户可根据自己的需求调整速度,速度分为高中低三档;被动牵引模式为根据被动牵引动作进行训练,用户可根据需要通过人机交互模块调整阻力大小,完成训练。
通讯模块可根据数据格式进行多种选择,例如:UART通信模块、WIFI通讯模块、Modbus通信模块。在本实施例中,采用WIFI通讯模块用于人机交互模块与控制模块之间的通信,也可使用蓝牙或NB-IoT通信模块,例如,WiFi模块的型号为ESP8266,其内置超低功耗TensilicaL10632位RISC处理器,CPU时钟速度最高可达160MHz,支持实时操作系统(RTOS)和Wi-Fi协议栈;或者采用型号为HC-05的蓝牙模块;采用UART通信模块用于姿态位置采集模块与控制模块之间的通信,以及压力采集模块与控制模块之间的通信;采用基于RS485的Modbus通信模块,用于电机驱动模块与控制模块之间的通信,以及电机驱动模块与推杆电机之间的通信,电机驱动模块采用的AQMD2410NS芯片,支持RS485多站点通讯,支持MODBUS-RTU协议,方便多种控制器(如单片机、PC机或PLC)控制,支持通讯中断停转保护,支持电机过载和堵转限流,防止过流损坏电机,支持堵转限位停转,具有18kHz的PWM频率,电机调速无PWM嚣叫声的特点。
如图5所示,为使用本申请实施例中的穿戴式多功能颈椎康复动力外骨骼控制系统的进行康复训练的流程:
S1.使用者通过人机交互模块选择训练模式、训练动作、速度、力度;
S2.控制模块根据使用者的选择,生成相应的动作控制信号发送至电机驱动模块;
S3.电机驱动模块根据动作控制信号驱动推杆电机对使用者的颈椎进行康复训练;
S4.控制模块根据姿态信号和推杆电机位置信号,以及推杆表面的压力数据,实时调整训练的力度和角度。
通过上述方法,本申请实施例中的穿戴式多功能颈椎康复动力外骨骼控制系统可以实现颈椎增强与康复训练,可在全关节活动范围内的颈部牵引运动训练,通过对颈部肌肉进行定向的阻抗训练和多方向的肌力训练,达到增强颈椎稳定性的有益效果。
以上所述的实施例仅是对本申请优选方式进行的描述,并非对本申请的范围进行限定,在不脱离本申请设计精神的前提下,本领域普通技术人员对本申请的技术方案做出的各种变形和改进,均应落入本申请权利要求书确定的保护范围内。
- 一种穿戴式多功能颈椎康复动力外骨骼控制系统
- 一种穿戴式多功能颈椎康复动力外骨骼