电动助力转向装置、电动助力转向装置用的控制装置以及程序
文献发布时间:2023-06-19 19:07:35
技术领域
本发明涉及电动助力转向装置、电动助力转向装置用的控制装置、程序。
背景技术
近年来,提出了在车辆的转向系统中具备电动马达,通过电动马达的动力来辅助驾驶员的转向力而使车轮进行转向的电动助力转向装置。
另外,已知如果车辆的行驶道路在横穿该行驶道路的方向上存在坡度,则在车辆行驶时,产生所谓的车体滑动。并且,提出了通过电动助力转向装置来抑制该车体滑动的技术。
例如,专利文献1所记载的电动助力转向装置的控制装置具备:电动马达,其施加针对车辆的方向盘的转向的辅助力;转向角传感器,其检测方向盘的转向角;以及控制装置。控制装置进行基于方向盘的转向转矩来控制电动马达的驱动力的通常控制。另外,控制装置在处于方向盘被保持在中立位置以外的位置的保持状态的情况下,根据基于车辆的车轮的转速估计出的估计转向角与转向角检测部所检测出的检测转向角之间的转向角偏差来校正驱动力,以使其比通常控制时的驱动力大。另一方面,控制装置在为了使车辆转弯而对方向盘进行转向的转向时不对驱动力进行校正。
在先技术文献
专利文献
专利文献1:日本特开2017-177950号公报
发明内容
发明所要解决的课题
然而,在现有技术中,由于是利用转向部件的转向角等来校正电动马达的驱动力,因此未考虑实际的车辆的状态量,驾驶员的转向感有时会恶化。
本发明的目的在于提供一种电动助力转向装置等,其考虑车辆的状态量来修正电动马达的驱动力,从而使驾驶员的转向感变得更加良好。
基于上述目的,本发明提供一种电动助力转向装置,其具备:电动马达,其针对方向盘的操作赋予使车轮转向的驱动力;以及控制单元,其估计车辆所行驶的行驶道路的横穿方向上的坡度的程度,根据估计出的坡度的程度,决定对产生电动马达的驱动力所需的目标电流进行校正的校正电流,利用校正电流对目标电流进行校正来进行电动马达的驱动的控制。
另外,本发明是一种电动助力转向装置用的控制装置,具备:坡度估计部,其估计车辆所行驶的行驶道路的横穿方向上的坡度的程度;校正电流决定部,其基于估计出的坡度的程度,决定对产生电动马达的驱动力所需的目标电流进行校正的校正电流;以及目标电流决定部,其基于决定出的校正电流,决定目标电流。
发明效果
本发明能够提供一种电动助力转向装置等,其通过考虑车辆的状态量对电动马达的驱动力进行校正,从而使驾驶员的转向感变得更加良好。
附图说明
图1是表示本实施方式的电动助力转向装置的概略结构的图。
图2是转向装置的控制装置的概略结构图。
图3是目标电流计算部和控制部的概略结构图。
图4是表示第一实施方式的校正电流计算部的功能结构例的框图。
图5是对作用于车辆的向心加速度进行说明的图。
图6是表示作用于车辆的各种加速度的图。
图7是表示由坡度估计部进行的处理的控制框图。
图8是表示由校正电流决定部进行的处理的控制框图。
图9是表示以往在校正电流决定部中进行的处理的控制框图。
图10是表示第二实施方式的校正电流计算部的功能结构例的框图。
图11是表示在第二实施方式中由校正电流决定部进行的处理的控制框图。
图12是说明齿条轴由于行驶道路的横穿方向上的坡度而受到的轴向力载荷的图。
图13是表示车轮的周边的结构的图。
图14是表示车轮的周边的结构的图。
图15是对拖曳距长度进行说明的图。
图16是表示在第三实施方式中由校正电流决定部进行的处理的控制框图。
具体实施方式
以下,参照附图对本发明的实施方式进行详细说明。
<电动助力转向装置整体的说明>
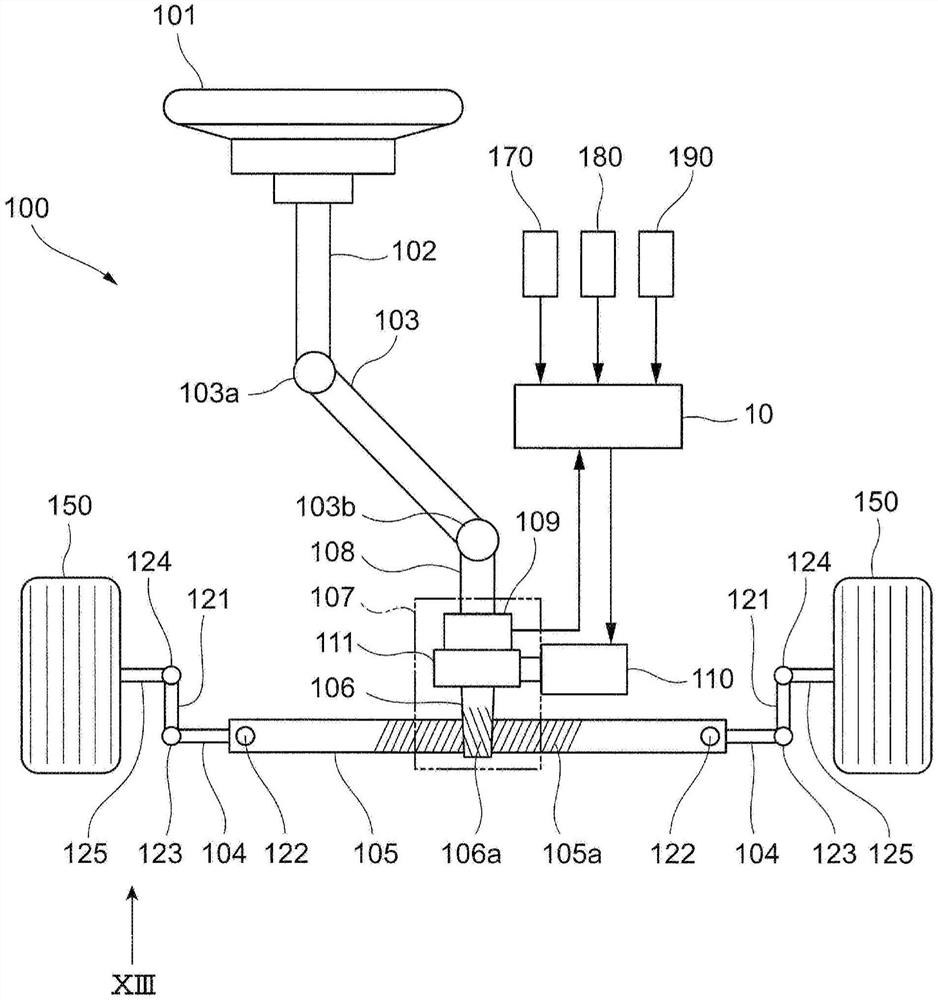
图1是表示本实施方式的电动助力转向装置100的概略结构的图。
电动助力转向装置100(以下,有时也简称为“转向装置100”)是用于任意地改变交通工具的行进方向的转向装置,在本实施方式中例示了应用于车辆的结构。
转向装置100具备供驾驶员操作的车轮(盘)状的方向盘(把手)101和一体地设置于方向盘101的转向轴102。转向轴102与上部连结轴103经由万向接头103a连结,上部连结轴103与下部连结轴108经由万向接头103b连结。
另外,转向装置100具备:与作为转动轮的左右的车轮150分别连结且以转向销124为中心旋转的转向节臂121以及转向节125;与转向节臂121连结的横拉杆104;以及与横拉杆104连结的齿条轴105。转向节臂121和横拉杆104以接合部123为中心旋转自如地接合。另外,横拉杆104与齿条轴105以接合部122为中心旋转自如地接合。
另外,转向装置100具备与形成于齿条轴105的齿条齿105a一起构成齿条小齿轮机构的小齿轮106a。小齿轮106a形成于小齿轮轴106的下端部。
另外,转向装置100具有收纳小齿轮轴106的转向齿轮箱107。小齿轮轴106在转向齿轮箱107中经由扭杆与下部连结轴108连结。在转向齿轮箱107的内部设置有基于下部连结轴108与小齿轮轴106的相对角度来检测方向盘101的转向扭矩T的扭矩传感器109。
另外,转向装置100具有:电动马达110,其支承于转向齿轮箱107;以及减速机构111,其针对电动马达110的驱动力进行减速并传递至小齿轮轴106。本实施方式的电动马达110是3相无刷马达。实际流过电动马达110的实际电流的大小和方向由马达电流检测部33(参照图3)检测。
而且,转向装置100具备控制电动马达110的工作的控制装置10。控制装置10被输入上述的扭矩传感器109的输出值即扭矩信号Td、检测车辆的移动速度即车速Vx的车速传感器170的输出值即车速信号v、检测车辆的横向的加速度即横向加速度G
如以上那样构成的转向装置100利用扭矩传感器109检测施加于方向盘101的转向扭矩T,根据该检测扭矩来驱动电动马达110,将电动马达110的产生扭矩传递至小齿轮轴106。由此,电动马达110的产生扭矩针对驾驶员对方向盘101施加的转向力进行辅助。换言之,电动马达110针对方向盘101的操作产生使车轮150转向的驱动力即辅助力。辅助力经由传递辅助力的齿条轴105施加于车轮150。
<控制装置10的说明>
接着,对控制装置10进行说明。
图2是转向装置100的控制装置10的概略结构图。
控制装置10是由CPU、ROM、RAM、备份RAM等构成的算术逻辑运算电路。
控制装置10被输入:将由上述扭矩传感器109检测出的转向扭矩T转换为输出信号而得到的扭矩信号Td;将由车速传感器170根据车辆的速度检测出的车速Vx转换为输出信号而得到的车速信号v;将由横向加速度传感器180根据车辆的横向的加速度检测出的横向加速度G
而且,控制装置10具有:目标电流计算部20,其基于扭矩信号Td来计算目标扭矩,并计算电动马达110供给该目标扭矩所需的目标电流;以及控制部30,其基于目标电流计算部20所计算出的目标电流来进行反馈控制等。
<目标电流计算部20以及控制部30的说明>
接着,对目标电流计算部20和控制部30进行详细说明。
图3是目标电流计算部20和控制部30的概略结构图。
目标电流计算部20具备:基础电流计算部21,其计算作为设定目标电流的基准的基础电流Ib;惯性补偿电流计算部22,其计算用于抵消电动马达110的惯性矩的惯性补偿电流;减震补偿电流计算部23,其计算限制马达的旋转的减震补偿电流;以及校正电流计算部24,其计算对目标电流进行校正的校正电流Ia。另外,目标电流计算部20具备基础电流计算部21、惯性补偿电流计算部22、减震补偿电流计算部23、基于由校正电流计算部24计算出的值来决定目标电流It的目标电流决定部25。
此外,向目标电流计算部20输入扭矩信号Td、车速信号v、横向加速度信号Gy、横摆率信号γs、将电动马达110的转速Nm转换为输出信号而得到的转速信号Nms等。
基础电流计算部21基于扭矩信号Td和来自车速传感器170的车速信号v来计算基础电流Ib,并输出包含该基础电流Ib的信息的基础电流信号Imb。
惯性补偿电流计算部22基于扭矩信号Td和车速信号v计算用于抵消电动机110及系统的惯性矩的惯性补偿电流,并输出包含该电流的信息的惯性补偿电流信号Is。
减震补偿电流计算部23基于扭矩信号Td、车速信号v以及电动马达110的转速信号Nms,计算限制电动马达110的旋转的减震补偿电流,并输出包含该电流的信息的减震补偿电流信号Id。
校正电流计算部24估计行驶道路的横穿方向上的坡度的程度,并基于估计出的坡度的程度来决定校正电流Ia。关于校正电流计算部24在后面叙述。
目标电流决定部25决定向电动马达110供给的目标电流。目标电流决定部25基于由基础电流计算部21计算出的基础电流信号Imb、由惯性补偿电流计算部22计算出的惯性补偿电流信号Is、由减震补偿电流计算部23计算出的减震补偿电流信号Id、以及由校正电流计算部24计算出的校正电流Ia来决定目标电流,并输出包含该电流的信息的目标电流信号IT。
控制部30具有:马达驱动控制部31,其控制电动马达110的工作;马达驱动部32,其驱动电动马达110;以及马达电流检测部33,其检测实际流过电动马达110的实际电流,并将实际电流检测信号Im输出至马达驱动控制部31。
马达驱动控制部31具有:反馈(F/B)控制部40,其基于由目标电流计算部20最终决定的目标电流(目标电流信号IT所示的值)与由马达电流检测部33检测出的向电动马达110供给的实际电流(实际电流检测信号Im所示的值)之间的偏差来进行反馈控制;以及PWM信号生成部60,其生成用于对电动马达110进行PWM驱动的PWM(脉冲宽度调制)信号。
反馈控制部40具有:偏差运算部41,其求出由目标电流计算部20最终决定的目标电流与由马达电流检测部33检测出的实际电流之间的偏差;以及反馈(F/B)处理部42,其进行反馈处理以使该偏差成为零。
[第一实施方式]
接下来,对决定上述的校正电流Ia的方法进行详细叙述。在此,首先,对决定校正电流Ia的方法的第一实施方式进行说明。在第一实施方式中,校正电流计算部24根据车辆的状态量来估计行驶道路的横穿方向上的坡度的程度,并基于估计出的坡度的程度来决定校正电流Ia。
<校正电流计算部24的说明>
图4是示出第一实施方式的校正电流计算部24的功能结构例的框图。
如图所示,校正电流计算部24具备取得部241、坡度估计部242、校正电流决定部243以及校正电流输出部244。
取得部241从车速传感器170取得车速信号v。另外,取得部241从横向加速度传感器180取得横向加速度信号Gy,从横摆率传感器190取得横摆率信号γs。
坡度估计部242基于车辆在行驶道路上行驶时作用于车辆的向心加速度(横G)来估计行驶道路的横穿方向上的坡度的程度。此外,在此,“行驶道路”是车辆行驶的道路,例如是马路。而且,“行驶道路的横穿方向”是相对于行驶道路延伸的方向而垂直的方向。例如,由于道路需要将落到路面上的雨水引导至侧槽等,因此有时会在该横穿方向上设置坡度。因此,行驶道路的横截方向的截面有时成为中央部高、随着去往两端的路肩而变低的所谓的鱼糕形状。行驶道路的横穿方向上的坡度有时也被称为横穿坡度。另外,“坡度的程度”是表示坡度的缓急的指标。坡度的程度例如是坡度的角度。但是,并不限定于此,只要能够表示坡度的程度即可,并不特别限定。例如,能够根据坡度的程度,以1~5这5个等级来表示坡度的程度。在该情况下,例如,能够设定为在坡度的程度为1的情况下,坡度最小,在坡度的程度为5的情况下,坡度最大。
坡度估计部242按照以下说明的方法,根据车速Vx、横向加速度G
图5是对作用于车辆的向心加速度Ay进行说明的图。
在此,车辆S以O点为中心进行旋转。此时,车速Vx、向心加速度Ay以及横摆率γ的关系成为以下的(1)式。即,坡度估计部242根据作用于车辆的横摆率γ以及车速Vx来计算向心加速度Ay。
Ay=γ·Vx…(1)
另外,图6是表示作用于车辆S的各种加速度的图。
这里,θ
此时,θ
G’=G·sin(θ
另外,实际作用于车辆的横向上的向心加速度Ay’成为以下的(3)式。即,由横向加速度传感器180检测出的横向加速度G
Ay'=G
在行驶道路的横穿方向上的坡度角度θ
Ay’≈Ay=γ·Vx…(4)
因此,θ
θ
在坡度角度θ
θ
另外,此时,坡度估计部242也可以校正因行驶道路的横穿方向上的坡度和/车辆的行驶而产生的车辆的横向上的高度之差。即,若在行驶道路上存在上述那样的坡度,则车辆会根据行驶道路的坡度而向左右方向倾斜,从而车辆的左右方向上的高度变得不同。另外,在行驶道路为曲线(curve)的情况下,车辆会产生侧倾,同样地车体会倾斜,从而车辆的左右方向上的高度会变得不同。还考虑这样的车辆的倾斜,由坡度估计部242校正车辆的横向的高低差,求出坡度角度θ
图7是表示由坡度估计部242进行的处理的控制框图。
坡度估计部242根据通过从横摆率传感器190取得的横摆率信号γs而掌握的横摆率γ和通过从车速传感器170取得的车速信号v而掌握的车速Vx,按照(1)式求出向心加速度Ay。并且,坡度估计部242根据通过从横向加速度传感器180取得的横向加速度信号Gy而掌握的横向加速度G
返回图4,校正电流决定部243基于估计出的坡度的程度,决定校正电流Ia,该校正电流Ia对产生电动马达110的辅助力所需的目标电流进行校正。即,当在行驶道路的横穿方向上存在坡度时车辆在行驶道路上行驶的情况下,车辆会由于重力的作用而欲向行驶道路变低的方向前进。该现象也被称为车体滑动。并且,驾驶员为了对其进行修正,以使车辆向行驶道路变高的方向前进的方式操作方向盘101。即,驾驶员以相对于车辆的左右方向向与因坡度而行驶道路变低的方向相反的方向前进的方式操作方向盘101。此时,校正电流决定部243为了产生辅助该驾驶员的操作的辅助力而求出校正电流Ia。
图8是示出由校正电流确定单元243执行的处理的控制框图。
校正电流决定部243通过代入预先基于经验规则制作并存储于ROM的、表示坡度角度θ
再次返回到图4,校正电流输出部244将由校正电流决定部243决定的校正电流Ia输出到目标电流决定部25。
之后,在目标电流决定部25中,基于从校正电流输出部244输出的校正电流Ia,进行目标电流的修正,决定最终的目标电流It。
图9是表示以往在校正电流决定部243中进行的处理的控制框图。
向校正电流决定部243输入右前轮速度、左前轮速度、右后轮速度、左后轮速度、车速Vx、方向盘101的转向角即转向舵角、通过驾驶员操作方向盘101而施加于方向盘101的转向扭矩。然后,根据右前轮速度、左前轮速度、右后轮速度、左后轮速度,求出转向角换算增益。另外,根据车速Vx,使用车速调整比率映射来求出车速调整比率,并且使用车速比率映射来求出车速比率。并且,根据转向舵角,使用转向角比率映射来求出转向角比率。此外,根据转向扭矩,使用扭矩比率映射来求出扭矩比率。然后,以车速调整比率调整转向角换算增益,使用校正电流映射来算出临时的校正电流。进而,以转向角比率、扭矩比率、车速比率对临时的校正电流进行调整,求出最终的校正电流。
即,车速调整比率、转向角比率、扭矩比率、车速比率是调整项。按照以往的方式,在该情况下,在使车辆急转弯等的车辆成为特殊的状态时,求出校正电流的逻辑不成立,因此要像这样使用较多的调整项针对求解校正电流的情况进行限制。然而,在像这样利用较多的调整项进行限制的情况下,辅助力容易变得不连续,有时会使驾驶员的转向感恶化。
在本实施方式中,根据车辆的状态量计算坡度角度θ
而且,在本实施方式中,由于是求出坡度角度θ
并且,在本实施方式中,不使用转向扭矩等会受到方向盘101内部的惯性、衰减、摩擦等影响的参数。因此,校正电流Ia的精度进一步提高。
[第二实施方式]
接着,对第二实施方式进行说明。在第二实施方式中,控制装置10根据行驶道路的路面的状态来变更上述控制。
图10是表示第二实施方式的校正电流计算部24的功能结构例的框图。
图示的校正电流计算部24与图4所示的第一实施方式相比,其不同点在于具有路面判定部245,其他相同。
因此,以下,以路面判定部245的功能为中心进行说明。
路面判定部245判定行驶道路的路面的状态。具体而言,路面判定部245判断行驶道路的路面是铺装道路还是未铺装道路(越野)。然后,路面判定部245在判定为路面是铺装道路的情况下,与第一实施方式同样地,根据坡度的程度来控制电动马达110的驱动。即,校正电流决定部243根据坡度的程度求出校正电流Ia。与此相对,在路面为未铺装道路的情况下,不进行该控制。在该情况下,校正电流决定部243将图8所示的车速增益设为0,由此,将校正电流Ia设为0。即,在目标电流决定部25中不进行目标电流的修正。
路面判定部245例如以如下方式判定行驶道路的路面的状态。
路面判定部245针对坡度角度θ
即,在未铺装道路(越野)的情况下,车辆会更多地左右摇晃,因此,计算出的坡度角度θ
图11是表示在第二实施方式中由校正电流决定部243进行的处理的控制框图。
图11所示的控制框图与图8所示的控制框图相比,在输入由路面判定部245输出的路面状态这一点上不同。并且,在路面状态为铺装道路的情况下,校正电流决定部243与第一实施方式同样地,将车速Vx代入车速增益映射,计算车速增益。与此相对,在路面状态为未铺装道路(越野)的情况下,不使用车速增益映射,车速增益为0。由此,校正电流Ia成为0。
在该情况下,车辆例如是越野车。在越野车在草地、沙地、泥泞地、岩石地等未铺装道路(越野)上行驶时,由于路面的凸凹、障碍物、积水等,车辆向左右方向倾斜,存在计算由此而产生的坡度角度θ
[第三实施方式]
接着,对第三实施方式进行说明。在第三实施方式中,根据行驶道路的横穿方向上的坡度,进一步考虑齿条轴105(参照图1)受到的轴向力载荷来计算校正电流Ia。齿条轴105的轴向力载荷是由于该坡度的存在而沿齿条轴105的轴向施加的载荷。
第三实施方式的校正电流计算部24的功能结构例与图4所示的第一实施方式的情况相同。
图12是说明由于行驶道路的横穿方向上的坡度而使齿条轴105受到的轴向力载荷的图。
在此,示意性地示出了车辆S在坡度角度θ
以下,对齿条轴105受到的轴向力载荷的计算方法进行说明。
图13以及图14是表示车轮150的周边的结构的图。另外,图15是对拖曳距长度L进行说明的图。
其中,图13是从图1的XIII方向观察车轮150的周边的图,是从水平方向观察车轮150的周边的图。
另外,图14是从图13的XIV方向观察车轮150的周边的图,是从铅垂方向观察车轮150的周边的图。即,图14是从与图1相同的方向观察车轮150的周边的图。
并且,图15是从图14的XV方向观察车轮150的图。
如图13及图14所示,在车轮150上连接有驱动轴158,从发动机等动力源被传递用于使车辆行驶的动力。即,从驱动轴158向车轮150传递旋转力,车轮150旋转,由此车辆行驶。另外,车轮150经由转向节125以及下臂153与车身159连接。转向节125与下臂153的接合部成为转向销124。而且,转向节125经由振动吸收器151与车身159连接。该振动吸收器151具备减震器151a和螺旋弹簧151b,通过设置于上部的球轴承151c与车身159连接。通过减震器151,车辆能够吸收来自路面的凹凸的冲击。
另外,在使齿条轴105向箭头A方向移动的情况下,转向节臂121和转向节125以转向销124为中心旋转,车轮150向箭头C方向转向。另外,在使齿条轴105向箭头B方向移动的情况下,转向节臂121和转向节125以转向销124为中心向反方向旋转,车轮150向箭头D方向转向。
此时,考虑连接球轴承151c和转向销124的轴,将其设为转向销轴J。并且,如图15所示,将转向销轴J与路面R交叉的点设为点Pc,将车轮150与路面R接触的点设为点Pw。并且,将点Pc与点Pw的距离设为拖曳距长度Lt。另外,将转向销轴J与接地点Pw的距离设为L。距离L由拖曳距长度Lt和后倾角θc预先确定。距离L也可以说是转向销124的中心与车轮150的接触路面的部位之间的距离。
另外,将转向节臂121的长度设为转向节臂长L
而且,若将车辆的重量中的由前轮所承受的重量设为M
F
图16是表示在第三实施方式中由校正电流决定部243进行的处理的控制框图。
图16所示的控制框图与图8所示的控制框图相比,在代替坡度电流映射而加入轴向力载荷映射这一点上不同。轴向力载荷映射是表示坡度角θ
然后,校正电流决定部243根据推力→电流变换系数,将轴向力载荷F
另外,此处使用的车速增益映射中,如图所示,在预先规定的低速度区域中,增益为0。此时,校正电流Ia成为0。该低速度区域例如是车速Vx为0km/h以上且60km/h以下的情况。另外,在预先规定的中速区域中,增益随着车速变大。该中速区域例如是车速Vx为60km/h以上且80km/h以下的情况。进一步地,在预先规定的高速度区域中,无论车速如何,增益都恒定。该高速度区域例如是车速Vx为80km/h以上的情况。即,轴向力载荷F
在第三实施方式中,根据行驶道路的横穿方向上的坡度,还考虑齿条轴105受到的轴向力载荷F
<程序的说明>
此外,本实施方式中的控制装置10进行的处理通过软件与硬件资源协作来实现。即,设置于控制装置10的内部的未图示的CPU执行实现控制装置10的各功能的程序,从而实现这些各功能。
因此,控制装置10进行的处理也能够作为用于使计算机实现如下功能的程序来理解:坡度估计功能,估计车辆行驶的行驶道路的横穿方向上的坡度的程度;校正电流决定功能,基于估计出的坡度的程度,决定对产生电动马达110的驱动力所需的目标电流进行修正的校正电流Ia;以及目标电流决定功能,基于决定出的校正电流Ia,决定目标电流。
另外,实现本实施方式的程序当然可以通过通信单元来提供,也可以存储在CD-ROM等记录介质中来提供。
以上,对本实施方式进行了说明,但本发明的技术范围并不限定于上述实施方式所记载的范围。根据权利要求书的记载可知,对上述实施方式施加了各种变更或改良的技术方案也包含在本发明的技术范围内。
符号说明
10:控制装置、20:目标电流计算部、24:校正电流计算部、30:控制部、100:电动助力转向装置、101:方向盘(把手)、110:电动马达、105:齿条轴、121:转向节臂、124:转向销、150:车轮、170:车速传感器、180:横向加速度传感器、190:横摆率传感器、241:取得部、242:坡度估计部、243:校正电流决定部、244:校正电流输出部、245:路面判定部、R:路面、S:车辆。
权利要求书(按照条约第19条的修改)
1.(修改后).一种电动助力转向装置,其具有:
电动马达,其针对方向盘的操作赋予使车轮转向的驱动力;以及
控制单元,其估计车辆所行驶的行驶道路的横穿方向上的坡度的程度,根据估计出的所述坡度的程度,决定对产生所述电动马达的驱动力所需的目标电流进行校正的校正电流,利用所述校正电流对所述目标电流进行校正来进行所述电动马达的驱动的控制,
所述控制单元判定行驶道路的路面的状态,根据判定出的路面的状态来变更所述控制,
所述控制单元在路面为铺装道路的情况下进行所述控制,在表示所述坡度的程度的指标的微分值大于预先规定的第一阈值的次数于每单位时间内超过第二阈值时,视为路面为未铺装道路的情况,不进行所述控制。
2.根据权利要求1所述的电动助力转向装置,其特征在于,
所述控制单元使用表示估计出的所述坡度的程度与坡度电流之间的对应关系的坡度电流映射来求出坡度电流,并且通过将坡度电流与由车速确定的车速增益相乘来求出所述校正电流。
3.根据权利要求1所述的电动助力转向装置,其特征在于,
所述控制单元基于由横向加速度传感器检测出的横向加速度和根据作用于车辆的横摆率以及车速计算出的向心加速度来估计所述坡度的程度。
4.根据权利要求1至3中的任意一项所述的电动助力转向装置,其特征在于,
所述控制单元对因为行驶道路的横穿方向上的坡度和/或车辆的行驶而产生的车辆在横向上的高度之差进行校正来进行所述控制。
5(修改后).根据权利要求1所述的电动助力转向装置,其特征在于,
所述电动马达经由齿条轴赋予所述驱动力,
所述控制单元还根据所述齿条轴因行驶道路的横穿方向上的坡度而受到的轴向力载荷来进行所述控制。
6(修改后).根据权利要求5所述的电动助力转向装置,其特征在于,
所述控制单元使用转向节臂长以及如下距离来计算所述轴向力载荷,该距离是转向销的中心与车轮的接触路面的部位之间的距离。
7(修改后).一种电动助力转向装置用的控制装置,其具有:
坡度估计部,其估计车辆所行驶的行驶道路的横穿方向上的坡度的程度;
路面判定部,其判定行驶道路的路面的状态;
校正电流决定部,其基于由所述路面判定部判定出的行驶道路的路面的状态和估计出的所述坡度的程度,决定对产生电动马达的驱动力所需的目标电流进行校正的校正电流;以及
目标电流决定部,其基于所决定的所述校正电流来决定所述目标电流,
所述路面判定部在表示所述坡度的程度的指标的微分值大于预先规定的第一阈值的次数于每单位时间内超过第二阈值时,判定为路面为未铺装道路,在表示所述坡度的程度的指标的微分值大于预先规定的第一阈值的次数于每单位时间内为所述第二阈值以下时,判定为路面为铺装道路,
所述校正电流决定部在路面为铺装道路的情况下,根据估计出的所述坡度的程度决定所述校正电流,在路面为未铺装道路的情况下,将所述校正电流设为零。
8.(删除)
9.(删除)
10.(删除)
说明或声明(按照条约第19条的修改)
1.修改的内容
修改后的权利要求1的记载是基于提出申请时权利要求1、5、6、7、说明书的[0045]、[0046]、图10的记载。
修改后的权利要求5的记载是基于提出申请时的权利要求8的记载。
修改后的权利要求6的记载是基于提出申请时的权利要求9的记载。
修改后的权利要求7的记载是基于提出申请时的权利要求10、5、6、7、说明书的[0045]、[0046]、[0048]、图8、图10的记载。
2.说明
修改后的权利要求1是对提出申请时的权利要求1加入了提出申请时的权利要求5-7的内容而得到的。
即,修改后的权利要求1的内容是,被认为具有新颖性和创造性的提出申请时的权利要求7的内容,该内容显然在对比文件1-5中没有记载。由此,本领域技术人员不能根据对比文件1-5容易地想到修改后的权利要求1的发明,该修改后的权利要求1的发明当然具有新颖性和创造性。
此外,以上事项对于从属于修改后的权利要求1的修改后的从属权利要求2-6的发明也同样。
修改后的权利要求7是对提出申请时的权利要求10加入了提出申请时的权利要求5-7的内容而得到的,在表述方面也对应着该权利要求进行了修改。
与修改后的权利要求1同样,该特征点显然在对比文件1-5中没有记载。由此,本领域技术人员不能根据对比文件1-5容易地想到修改后的权利要求7的发明,该修改后的权利要求7的发明当然具有新颖性和创造性。
综上,修改后的权利要求1-7的发明具有新颖性和创造性。