一种组合层级螺旋式微纳米游泳机器人
文献发布时间:2023-06-19 19:18:24
技术领域
本发明属于微型机器人领域,具体涉及一种组合层级螺旋式微纳米游泳机器人。
背景技术
微型游泳机器人能够在非结构化或高度复杂的环境中灵活游动,在交付治疗、组织工程学、微创手术治疗、生物电子学等方面拥有广泛的研究价值和应用前景。如利用微型游泳机器人载药,运输到人体内病灶所在位置进行交付治疗。在设计微型游泳机器人时需要考虑不同的性质:柔软性,使其能够与周围的细胞覆盖的软组织等敏感环境进行温和的交互,而不造成损伤;对刺激作出反应的可重构性和聪明性,以改善运动和功能方面的适应性。然而,现有的微型游泳机器人推进速度慢,推进速度峰值约为40微米/秒;对外部驱动依赖性强,例如外接电机通过化学能驱动,或者通过磁场、声能、光能等进行驱动,这都增加了正体结构复杂性,降低了小型化机器人在特殊环境中的灵活性。为了解决和实现高效稳定推进微型游泳机器人,更需要从结构设计入手进行游泳性能的改进。
发明内容
本发明的目的是为了解决现有微型游泳机器人推进速度慢问题,提供一种组合层级螺旋式微纳米游泳机器人,在保证稳定性和恢复力维持现有水平的基础上,经过后面的层级结构设计,推进速度能大幅度提升,降低对外加驱动的依赖性。
本发明的目的是通过以下技术方案实现的:
一种组合层级螺旋式微纳米游泳机器人,所述机器人包括刚性头部、层级螺旋尾、驱动电机、头尾连接段,其中:
所述刚性头部内部放置微型驱动电机,为微型游泳机器人运动提供驱动力;
所述头尾连接段为直径相同的螺旋结构,所述层级螺旋尾为直径逐渐增大的螺旋结构,所述头尾连接段和层级螺旋尾一体制成;所述头尾连接段与刚性头部紧密粘接。
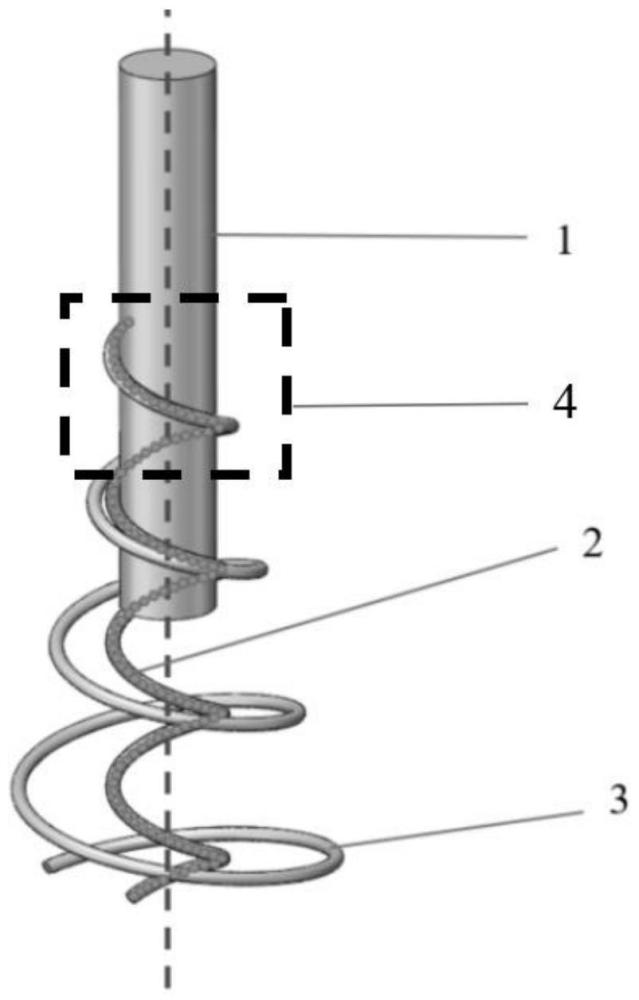
刚性头部与层级螺旋尾间隙配合,完全粘接。几何上刚性头部和螺旋尾之间不是刚好尺寸贴合,预留一定胶粘的缝隙。例如刚性头部的半径为0.64μm,螺旋尾截面为圆形,半径为0.09μm,螺旋半径为0.74μm,中间留有0.01μm的空隙。在数值计算建模过程中,如果结构尺寸正好配合会出现面的交集、导致划分网格出现问题,所以采用了这样的操作;在实际实验制备中,尺寸刚好配合会为胶粘带来一定的麻烦,预留尺寸能保证测量和操作更加精准。所述刚性头部与层级螺旋尾中间包含连接过渡段,头部与尾之间为绑定连接,连接部分为半径一致的螺旋线。图1中头尾连接段为层级螺旋尾初始段,依旧采用半径一致的螺旋线设计,保证头、尾之间的正常连接,避免虚接触、运动过程头尾分离。
进一步地,所述层级螺旋尾由亲水单体通过光刻法制造。
进一步地,所述层级螺旋尾采用AAm亲水单体材料(NIPAAm/AAm/PEGDA配比为85:15:1)制成,其整体长度为13.5~16.5μm。
进一步地,所述刚性头部采用金属镍制成,采用圆柱构型,其高度7.5μm,半径0.64μm。
进一步地,所述层级螺旋尾截面为圆形,整体径向半径逐渐增大,初始螺旋半径为R
进一步地,所述微型游泳者在硅油中实现游泳运动,整体环境为低雷诺系数流体环境(雷诺系数为0.814)。本发明适用于低雷诺流场环境,只是本发明涉及的所有数值计算都是在0.814雷诺数流场环境中进行的。低雷诺数是本发明背景理论简化Stokes方程成立的前提条件。
本发明采用径向半径逐渐增加的层级螺旋尾相较于普通螺旋尾(图10)稳定性与恢复力维持相当水平,速度显著提升。工作环境雷诺系数可类比人体血液,采用硅油进行体外模拟,雷诺系数为0.814。游泳机器人的运动性能是通过COMSOL
进一步地,将层级螺旋尾扩展为组合螺旋尾,所述组合螺旋尾为层级螺旋尾、半径一致的螺旋尾或半径逐渐减小的螺旋尾中的一种或两种配合使用。
本发明中,靠近刚性头部层级设计决定速度增减。图2-10中螺旋尾为两种结构设计的螺旋尾的组合式设计(图6、图8、图10可以理解为相同结构设计的两段结构设计的叠加)。经验证,径向半径逐渐增大、逐渐开口的螺旋尾相对于径向半径一致、直上直下的螺旋尾机器人(图10)有增加速度的效果;径向半径逐渐减小、逐渐收口的螺旋尾则具有减速效果。靠近头部的第一段尾采用以上提到的哪种尾部设计,决定了该种机器人的“基调”。例如图4为层级开口+直上直下设计,图9为直上直下+层级开口设计,两者比较图4中结构增速效果更好。因此本发明中给出了图2-10中的各种组合设计,通过靠近刚性头部的第一段设计来控制增速或者减速效果,并通过组合设计实现速度梯度变化效果。
相比于现有技术,本发明具有如下优点:
1、层级螺旋式结构设计能从自身出发,提供更大转矩和动力帮助运动推进,减轻外载动力装置的重量,提高整体结构灵活性,适应复杂生物环境,简化工艺控制成本。
2、根据实际应用环境中需要调整层级螺旋的组合,可以实现在常规径向半径一致、速度不可调控的螺旋基础上增速或者减速,为设计集群式微型游泳机器人的速度梯度提供策略。
3、在实现提速的前提下,通过仿真模拟验证,层级螺旋结构能够保证较高的稳定性,发生倾倒后恢复时间较短,能保持相当的恢复力。
4、相比于传统微型游泳机器人的单一速度模式,层级螺旋尾与头部靠近的部分对于整体速度的增减走向起决定作用,长度、螺距、螺旋数、径向半径等几何参数对于推进力和阻力的影响显著,通过控制与调节可实现速度定向调控效果。
5、本发明在实现集群机器人群体速度可调控基础上,大大降低传统单一微型游泳机器人的失败率,降低由于医疗影像设备限制的观测难度,为生物工程、微创医学等前沿学科发展提供新的契机。
附图说明
图1为本发明的单一层级结构示意图;
图2是本发明组合式层级螺旋结构1示意图;
图3是本发明组合式层级螺旋结构2示意图;
图4是本发明组合式层级螺旋结构3示意图;
图5是本发明组合式层级螺旋结构4示意图;
图6是本发明组合式层级螺旋结构5示意图;
图7是本发明组合式层级螺旋结构6示意图;
图8是本发明组合式层级螺旋结构7示意图;
图9是本发明组合式层级螺旋结构8示意图;
图10是本发明组合式层级螺旋结构9示意图。
具体实施方式
下面结合附图对本发明的技术方案作进一步的说明,但并不局限于此,凡是对本发明技术方案进行修改或者等同替换,而不脱离本发明技术方案的精神和范围,均应涵盖在本发明的保护范围中。
参见图1至图10,本发明提供的能够在低雷诺系数流场中快速运动的层级式螺旋微纳米游泳机器人由刚性头部1(内含电机马达)、径向直径统一的普通螺旋尾2或径向直径逐渐增大的层级螺旋尾3构成。
所述刚性头部1为长细比为11.72(长度7.5μm,半径0.64μm)的圆柱,相对于立方体或者方形板头部形状能有效减阻。刚性头部可内置电机进行外部驱动,或用NdFeB等永磁金属或合金制造,进行磁场驱动。本发明采用电能驱动。若采用径向直径统一的普通螺旋尾2,刚性头部1与螺旋尾2之间采用胶水粘接法,增加刚性头部与亲水螺旋尾之间的界面粘接能。若采用径向直径逐渐增大的层级螺旋尾3,为保证头部1与螺旋尾3之间的充分粘接,增加径向直径统一的连接过渡段部分4,这样可保证整体结构特征,并保证头尾充分接触。
所述游泳机器人置于流场中,头部处于先接触流体的“前方”,减小阻力,尾部2或3处于流场“后端”增加扭矩和推进力。
所述径向直径逐渐增大的层级螺旋尾3相对于螺旋尾2的优势在于,直径稳定增加可以在保证稳定性和恢复时间的基础上增加推进力和前进速度。层级概念指导下的组合式层级螺旋游泳机器人设计在图2~10中给出。径向半径逐渐减小的螺旋尾与螺旋尾2或层级螺旋尾3的组合,实现了游泳机器人速度梯度效果,为集群机器人设计提供新思路。其中图8在基础螺旋尾2与刚性头部1结合的结构基础上相比于图10显著提速69.4%,图5在图10基础上显著减速31.8%。
本发明中,所述刚性头部1半径0.64μm,高度7.5μm。
本发明中,所述螺旋尾2或3大半径0.74μm,螺旋截面为圆形截面,小半径为0.09μm,轴向节距为2μm,半径逐渐增大结构的径向节距为0.5μm,半径逐渐减小结构的径向节距为0.3μm。除连接段外的螺旋匝数为3-4。
本发明中,所述低雷诺系数流场环境为硅油,其密度为964kg/m