用于机动车辆的自适应巡航控制
文献发布时间:2023-06-19 09:23:00
技术领域
本发明涉及对机动车辆进行自适应巡航控制的领域,并且更具体地涉及自适应速度控制或自适应距离控制。
背景技术
用于辅助机动车辆驾驶的设备包括自适应巡航控制器,该自适应巡航控制器也被称为术语“自适应巡航控制停走系统”或相应的首字母缩写“ACCS&G”。结合在跟随车辆中的自适应巡航控制器使得可以通过考虑位于跟随车辆前方的引导车辆来控制跟随车辆的巡航。表述“控制巡航”应理解为是指控制跟随车辆的速度或者跟随车辆与引导车辆之间的距离。当引导车辆停止时,自适应巡航控制器检测到该停止并命令跟随车辆停止。当引导车辆重新启动时,自适应巡航控制器停止命令跟随车辆停止。
以常规方式,自适应命令控制器能够在跟随车辆停止的瞬间之前存储控制设定点。当引导车辆重新启动时,控制以所存储的设定点恢复。例如,自适应巡航控制器将用于以设定点速度激活对跟随车辆的速度控制的设定点保存在存储器中。当引导车辆重新启动时,以设定点速度自动激活速度控制。
然而,这样的设计不能完全令人满意。实际上,当引导车辆在交通信号灯、停车标志或环形交叉路口处停止时,以所存储的设定点恢复控制可能会产生危险情况,诸如,在交通信号灯、停车标志处没有停止标记或者违反优先级规则。
为了减轻这些缺陷,已经提出了在引导车辆停止超过几秒数量级的极限时重新初始化所存储的设定点。
尽管这种解决方案使得可以限制由于存储设定点而偶然引起的危险,但是该解决方案在不表现出任何特定危险的情况下(例如在高速公路上的时停时动情况下)限制了驾驶员重新激活控制。
发明内容
鉴于前述内容,本发明的目的是允许能减轻上述缺陷的自适应巡航控制。
更具体地,本发明的目的是限制与自适应巡航控制的设定点的存储有关的危险,同时避免在几乎没有或没有危险的情况下迫使驾驶员重新激活控制。
为此,提出了一种用于机动车辆的自适应巡航控制器,该自适应巡航控制器包括用于检测引导车辆的检测模块、能够制定设定点的制定模块、被配置为存储与该设定点相对应的值的存储模块、被配置为在该车辆停止的瞬间被初始化和致动的计时器以及用于重新初始化该存储模块的重新初始化模块。
根据其一般特性之一,该控制器包括能够根据该车辆的环境来确定极限的建立模块,该重新初始化模块被配置为在该计时器递送的时长大于该极限时重新初始化由该存储模块存储的值。
该建立模块使得可以根据车辆正在其上行驶的环境来建立极限值。因此,重新初始化所存储的设定点的迅速性与对由车辆引起的危险程度的估计相关。
根据一个实施例,该建立模块包括能够确定该车辆的环境的确定模块以及包含取决于环境的极限值的地图。
有利地,该制定模块能够制定从以下各项中选择的至少一个设定点:速度控制激活设定点、控制速度设定点、相对于引导车辆的距离控制的激活设定点以及控制距离设定点。
有利地,该确定模块被配置为确定从以下各项中选择的环境:城市环境、城郊环境、农村环境、快速公路环境和高速公路环境。
优选地,该确定模块包括从以下各项中选择的至少一个装置:超声波传感器、雷达、激光雷达、相机、惯性测量单元、里程表、基于卫星的全球定位设备。
这样的装置是通常已经结合在机动车辆中的设备。自适应巡航控制器的生产成本因此受到限制。
在一个实施例中,该确定模块包括从以下各项中选择的至少一个识别单元:针对另一车辆的识别单元、行人识别单元、道路基础设施识别单元、道路几何形状识别单元以及气象条件识别单元。
有利地,该确定模块能够识别从高速公路路段开端标志、主网络路线面板和辅助网络路线面板中选择的至少一个高速公路或快速公路符号,并且被配置为在识别出高速公路或快速公路符号时确定环境为道路环境。
在一个实施例中,该确定模块能够识别从楼宇密集区进入标志、自行车道通告标志和人行横道通告标志中选择的至少一个城市符号,并且被配置为在识别出城市符号时确定该环境是城市环境。
在另一实施例中,该确定模块能够识别从环形交叉路口指示标志、停车标志和交通信号灯通告标志中选择的至少一个危险符号,并且被配置为在识别出危险符号时确定该环境是危险环境。
有利地,该建立模块在道路环境的情况下选择介于25秒至35秒之间的极限,在城市环境的情况下选择介于2秒至4秒之间的极限,并且在危险环境的情况下选择小于0.1秒的极限。
在这些值间隔中选择的极限特别适用于限制由于存储设定点而偶然引起的危险,同时避免在几乎没有或没有危险的情况下实施重新初始化。
根据另一方面,提出了一种对机动车辆进行自适应巡航控制的方法,其中,检测引导车辆,制定设定点,在该车辆停止的瞬间之前存储与该设定点相对应的值,确定该车辆的环境,并根据所确定的环境重新初始化所存储的值。
在一种实施模式中,从停止的瞬间起致动计时器,根据车辆的环境来计算极限,并且在计时器递送的时长大于该极限时重新初始化所存储的值。
附图说明
通过阅读单纯以非限定性示例的方式并参见附图所给出的以下描述,本发明的其他目标、特性和优点将变得明显,在附图中:
-图1是机动车辆的示意性视图,该机动车辆结合了根据本发明的一个方面的控制器,
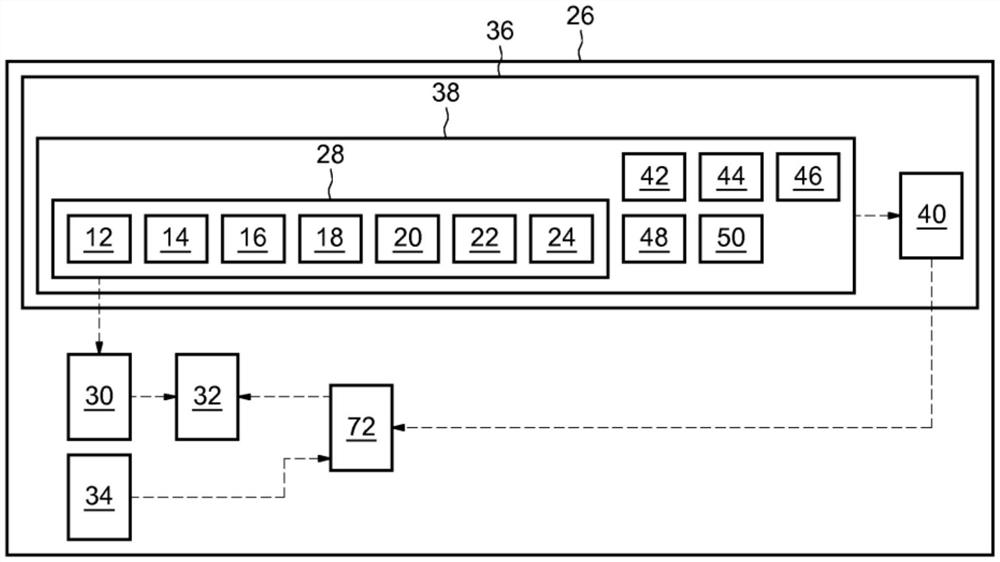
-图2是图1的车辆的控制器的示意性表示,
-图3展示了高速公路符号和快速公路符号的示例,
-图4展示了城市符号的示例,
-图5展示了危险符号的示例,以及
-图6展示了根据本发明的另一方面的进行自适应巡航控制的方法。
具体实施方式
参考图1,示意性地表示了机动车辆2。车辆2包括前端4和后端6。
在本专利申请中,词语“前”和“后”将被理解为是指车辆2的前端4和后端6。同样地,术语“纵向”、“横向”、“左”和“右”将通过考虑整体连接车辆2的端部4和6的纵向方向来理解。
车辆2包括车身壳体8、车载计算机10、驾驶员界面11以及基于卫星的全球定位系统12(也被称为术语“全球导航卫星系统”和相应的首字母缩写为“GNSS”),诸如,例如通过相应的首字母缩写“GPS”而公知的“全球定位系统”。
此外,车辆2包括雷达14、激光雷达16、超声波传感器18和相机20。部件14、16、18和20被布置在车辆2的前端4附近(例如,被布置在散热器格栅、通风帽通风格栅中)、在车辆2的挡风玻璃或挡泥板附近的区域中。以这种方式,部件14、16、18和20获取表示车辆2的环境、特别是位于车辆2前方的环境的图像。
车辆2包括里程表22和惯性测量单元24。里程表22和惯性测量单元24与车载计算机10进行信息链接,并且能够提供诸如车辆2的相对位置或加速度等信息。里程表22和车载计算机10能够确定车辆2的速度V
车辆2包括自适应巡航控制器26。在所展示的示例中,控制器26实施对速度V
参考图2,控制器26包括定位系统12、雷达14、激光雷达16、超声波传感器18,相机20、里程表22和惯性测量单元24。部件12、14、16、18、20、22和24一起构成了检测模块28,该检测模块旨在检测引导车辆(未表示)的存在和该引导车辆相对于车辆2的位置。
控制器26包括制定模块30。模块30与模块28和车载计算机10进行信息链接。模块30的功能是根据车辆2的运行参数、车辆2的驾驶员的意图以及引导车辆的存在和位置来制定设定点。
更具体地,模块30制定激活对速度V
模块30产生控制速度设定点CONS_2。设定点CONS_2可以取车辆2可以达到的任何速度值。更具体地,模块30从车载计算机10和输入界面11收集设定点CONS_2。
模块30制定激活对距离Δ的控制的设定点CONS_3。如果必须实施对距离Δ的控制,则设定点CONS_3取值“是”,否则取值“否”。如果检测模块28未检测到引导车辆的存在,则设定点CONS_3被强制为值“否”。
制定模块30产生车辆2与引导车辆之间的控制距离的设定点CONS_4。设定点CONS_4可以取比光学传感器14、16、18和20的最大范围小的任何距离值。在所展示的示例中,根据速度V
设定点CONS_1、CONS_2、CONS_3和CONS_4被呈送到车辆2的牵引命令设备(未表示)。牵引命令设备驱动车辆2的动力传动系(未表示),其方式为使得车辆2按照设定点CONS_1、CONS_2、CONS_3和CONS_4移动。换句话说,牵引命令设备驱动动力传动系,其方式为使得:
-如果CONS_1=“是”,则速度V
-如果CONS_3=“是”,则距离Δ收敛于CONS_4。
模块28和模块30配备有用于检测引导车辆的显著减速或完全停止的硬件装置和软件装置。当检测到引导车辆的显著减速或完全停止时,模块30发出存储信号MEMO。此后,模块30对设定点CONS_1、CONS_2、CONS_3和CONS_4进行适配,以使车辆2逐渐停止。
控制器26包括存储模块32。模块32与模块30进行信息链接。更具体地,在由模块30发出的信号MEMO的每个上升沿,模块32存储由模块30发出的设定点CONS_1、CONS_2、CONS_3和CONS_4的值。
控制器26包括与车载计算机10进行信息链接的计时器34。更具体地,计时器34被配置为将自身初始化为零并且一旦速度V
控制器26包括建立模块36。建立模块36包括确定模块38和地图40。在所展示的示例中,模块38尤其包括检测模块28。
确定模块38包括针对另一车辆的识别单元42、行人识别单元44、道路几何形状识别单元46、道路基础设施识别单元48以及气象条件识别单元50。单元42、44、46、48和50与模块28进行信息链接。更具体地,单元42、44、46、48和50配备有用于处理由模块28的部件14、16、18和20捕获的图像以及由模块28的部件22和24收集的信息的硬件装置和软件装置。基于这些图像和该信息,单元42、44、46、48和50识别表示由车辆2引起的危险程度的数据。
在所展示的示例中,单元48配备有用于识别表征车辆2的环境的路标的硬件装置和软件装置。在图3至图5中表示了这种路标的示例。
单元48被配置为识别高速公路路段开端标志52、国家路线面板54和地区路线面板56。如果单元48识别出标志52、54或56,则模块38发出信号ROAD_ENVIR。因此,模块38能够检测到车辆2正在道路环境(诸如,环形道路或旁道)中行驶,也就是说,在高速公路、快速公路、农村背景中的主要道路或城郊背景中的主要道路上行驶。
此外,单元48被配置为识别楼宇密集区进入标志58、自行车道通告标志60和人行横道通告标志62。如果单元48识别出标志58、60或62,则模块38发出信号URBAN_ENVIR。因此,模块38能够检测到车辆2在城市环境中行驶,也就是说,尤其是在城镇的街道上行驶。
单元48被配置为识别针对特定事件的通告标志64、环形交叉路口指示标志66、停车标志68(也被称为术语“停止”标志)和交通信号灯通告标志70。如果单元48识别出符号64、66、68或70,则模块38发出信号DANGER_ENVIR。因此,模块38能够检测到车辆2正在危险的环境中行驶,也就是说,尤其是在城市背景、城郊背景或农村背景中的十字路口或平交路口附近行驶。
在所展示的示例中,单元48被配置为识别写在标志52、54、56、58、60、62、64、66、68和70上的形状、大小、颜色和字符。尽管单元48被特别配置为识别图3至图5中表示的、与法国高速公路法规的规范相对应的标志,但是显而易见的是,在不脱离本发明的范围的情况下,可以将单元48配置为识别其他标志,尤其是与车辆2打算在其中行驶的另一个国家的法律相对应的标志。
当上述标志中没有一个能被识别出时或者当以太显著的误差容限识别出上述标志时,确定模块38被配置为考虑由单元42、44、46和50分析的数据。
更具体地,单元42收集由雷达14、激光雷达16、超声波传感器18和相机20捕获的图像,以识别在车辆2的环境中其他车辆的存在和位置。单元44收集与单元42相同的图像,以检测车辆2附近的行人的存在。如果识别出大量的车辆和/或行人,则模块38发出信号URBAN_ENVIR。
单元46收集由定位系统12、里程表22和惯性测量单元24提供的信息,以及由雷达14、激光雷达16、超声波传感器18和相机20捕获的图像,以识别特定的道路几何形状。特别地,单元46可以检测出呈现环形交叉路口形状的车道、呈现斜坡的车道、呈现快速公路入口交流道形状的车道、呈现交叉路口形状的车道。根据由单元46检测到的道路几何形状,模块38发出不同的信号ROAD_ENVIR、URBAN_ENVIR或DANGER_ENVIR。
单元50收集由雷达14、激光雷达16、超声波传感器18和相机20捕获的图像,以及由里程表22和惯性测量单元24发出的信息,以识别特定的气象条件。例如,如果单元50检测到下雨或下雪的天气条件,则模块38发出不同的信号DANGER_ENVIR。
地图40与模块38进行信息链接。更具体地,地图40收集由模块38发出的信号ROAD_ENVIR、URBAN_ENVIR或DANGER_ENVIR。地图40根据所收集的信号来传递时间极限LIM的值。在所展示的示例中,地图40递送:
-当输入信号ROAD_ENVIR作为输入时,极限LIM介于25秒至35秒之间、优选地基本上为30秒,
-当输入信号URBAN_ENVIR作为输入时,极限LIM介于2秒至4秒之间,优选地基本上为3秒,以及
-当输入信号DANGER_ENVIR作为输入时,极限LIM严格小于0.1秒,优选地基本上为0秒。
控制器26包括与模块32、计时器34和地图40进行信息链接的重新初始化模块72。更确切地,模块72能够收集极限LIM。此外,模块72能够收集由计时器34显示的时长t。模块72能够发出用于对存储模块32进行重新初始化的信号REINIT。模块72被配置为一旦时长t超过极限LIM就发出信号REINIT。当模块32接收到信号REINIT时,所存储的设定点CONS_1、CONS_2、CONS_3和CONS_4被重新初始化。更具体地,当模块32收集到信号REINIT时,设定点CONS_1和CONS_3取值“否”。
参考图6示意性地表示了能够借助于控制器26来实施的进行自适应巡航控制的方法。
该方法包括重新初始化步骤E00。在步骤E00期间,车辆2以速度V
该方法包括建立第一设定点和第二设定点的步骤E01。更确切地,在步骤E01的过程中,设定点CONS_1取值“是”。设定点CONS_2取与速度V
该方法包括实施对速度V
此后,该方法包括测试步骤E03,在该测试步骤的过程中,检测在车辆2的行车道中并且在车辆2的前方是否存在车辆。当对步骤E03的响应为“否”时,继续应用步骤E02。如果在步骤E03完成时响应为“是”,则应用步骤E04。
在步骤E04的过程中,修改设定点CONS_1、CONS_3和CONS_4的值。更确切地,设定点CONS_l取值“否”,设定点CONS_3取值“是”,并且设定点CONS_4取与速度V
该方法包括步骤E05,在该步骤的过程中,控制距离Δ,其方式为使得该距离收敛于Δ
该方法包括测试步骤E06。在步骤E06的过程中,检测引导车辆是否进行明显减速或停止。如果在步骤E06的过程中未检测到引导车辆的明显减速或停止,则重复步骤E05。如果在步骤E06完成时检测到引导车辆的停止或明显减速,则应用步骤E07。
在步骤E07的过程中,发出信号MEMO,并且模块32存储设定点CONS_1、CONS_2、CONS_3和CONS_4。
该方法包括使车辆2停止的步骤E08。在步骤E08的过程中,以使车辆2停止的方式驱动牵引命令设备。当车辆2已经停止时,计时器34被初始化并且被致动。然后终止步骤E08。
该方法包括测试步骤E09,在该测试步骤的过程中,确定引导车辆是否重新启动。只要响应为“否”,就重复步骤E09。一旦对步骤E09的响应为“是”,则应用步骤E10。
在步骤E10的过程中,收集由地图40递送的、与车辆2正在其中行驶的环境相对应的极限LIM。
该方法包括将极限LIM与由计时器34显示的值t进行比较的测试步骤E11。更确切地,在步骤11中:
-如果t -如果t>LIM,则应用步骤E12。 在步骤E12的过程中,模块72发出信号REINIT。因此,模块32被重新初始化,也就是说,设定点CONS_1和CONS_3取值“否”。在步骤E12完成时,该方法终止。 在所展示的示例性实施方式中,对重新初始化的选择直接取决于值t与可取各种值的极限LIM之间的比较。然而,通过设想其他的驱使模式也不会脱离本发明的范围。例如,可以从由模块38发出信号DANGER_ENVIR开始直接实施步骤E12。此外,步骤E10和E11可以用测试步骤代替,在该测试步骤的过程中,同时实施两个测试,即确定是否已经发出信号URBAN_ENVIR并且值t是否超过2秒,或者是否已经发出信号ROAD_ENVIR并且值t是否超过30秒。换句话说,这样的步骤可以被写为: [{发出了URBAN_ENVIR并且t≥2秒} 或者{发出了ROAD_ENVIR并且t≥30秒}] 如果对该测试步骤的响应为是,则应用步骤E12。否则,将以所存储的设定点恢复巡航控制。 鉴于前述内容,借助于根据本发明的控制器26和控制方法,可以实施自适应巡航控制,同时限制与在危险情况(诸如,具有交通信号灯的十字路口)下存储设定点有关的风险,然而在几乎没有或没有危险的情况(诸如,高速公路上的时停时动)下,不会限制驾驶员重新激活控制。
- 自适应巡航控制及用于控制装备有自适应巡航控制系统的机动车辆的速度的方法
- 用于操作具有自适应巡航控制系统的机动车辆的方法