一种航空电动铰车设备的手持控制器
文献发布时间:2023-06-19 09:24:30
技术领域
本发明涉及但不限于航空货运系统电动铰车设备技术领域,尤指一种航空电动铰车设备的手持控制器。
背景技术
目前,国内运输飞机货运系统采用电动铰车设备牵引装卸轮式非自行装备和空投货台、货盘、集装单元等。
现有电动铰车设备通常为针对小运输量的货运系统设计的,常规设计中,一台电动铰车设备通常仅能牵引3吨左右的货物,从而使得其装卸货物的能力较低,可靠性较低,难以满足较大运输量的牵引要求。
发明内容
本发明的目的:本发明提供一种航空电动铰车设备的手持控制器,通过该手持控制器可以单独操纵一台电动铰车,也可同时操纵两台电动铰车,提高了货运速率和能力。
本发明的技术方案:
本发明实施例提供一种航空电动铰车设备的手持控制器,包括:壳体14,以壳体14的中心面对称安装的两个结构相同的控制模组;
其中,每个所述控制模组,包括:手柄组件1、密封圈2、第一衬套3、第二衬套4、端盖组件5、凸轮6、2个平面蜗卷弹簧7、第三衬套8、螺柱9、第四衬套10、螺栓11、螺母12、第五衬套13、支架组件16;
其中,所述壳体14的端部设置有端盖组件5,手柄组件1的手柄轴1b穿过端盖组件5的内圆孔,手柄轴1b从外侧到内侧依次安装有凸轮6、第三衬套8、螺柱9和第四衬套10,并通过第五衬套13将手柄轴1b的内端安装在壳体14中部的支撑座上;端盖组件5内侧安装的有4个机电式微动开关;
所述壳体14的支撑座两侧分别设置有支架组件16,并通过第三衬套8和第四衬套10形成安装结构,与支架组件16上的螺栓11安装平面蜗卷弹簧7,并通过螺母12紧固;所述壳体14上还安装有电连接器;
所述手持控制器,用于通过每个所述控制模组向不同方向转动时,所述控制模组的手柄组件1带动凸轮6的转动,使得凸轮6按压端盖组件5上相应的机电式微动开关,从而向所述控制模组控制的电动铰车控制箱发出相应的控制指令,松开手柄组件1后恢复到自由状态,继续转动按压相同方向上的另一个机电式微动开关,并发出相应的控制指令。
可选地,如上所述的航空电动铰车设备的手持控制器中,
所述手柄组件1包括:手柄1a和手柄轴1b,手柄1a通过其上的扁孔与手柄轴1b上的扁轴连接,并通过螺钉紧固;
所述手柄轴1b设置为5段台阶轴,外端第一台阶轴为扁轴,与手柄1a上的扁孔连接;第二台阶轴1b2接近手柄1a一端的光轴上安装有密封圈2和第一衬套3;第二台阶轴1b2远离手柄1a一端的光轴端面上设置有3个弧形槽1b1,用于容纳端盖组件5中的钢球;第三台阶轴1b3为扁轴,与凸轮6上的扁孔连接;第四台阶轴1b4为光轴,从外侧向内侧依次安装有第三衬套8、螺柱9和第四衬套10,且螺柱9可在第三衬套8和第四衬套10形成的窗口区域内转动;第五台阶轴1b6为光轴,通过与第五衬套13的配合安装在壳体14中部的支撑座上,左、右对称设置的两个手柄轴1b的第五台阶轴1b6共用第五衬套13;
其中,第一台阶轴、第二台阶轴1b2和第三台阶轴1b3的圆柱部分直径相同;第四台阶轴1b4的直径小于第三台阶轴1b3的直径,第五台阶轴1b6的直径比小于第四台阶轴1b4的直径。
可选地,如上所述的航空电动铰车设备的手持控制器中,
所述端盖组件5包括:带组件5a、端盖螺柱5b、端盖螺母5c、机电式微动开关5d、设置为一端开口的摇臂5e、开关支架5f、摇臂转轴5g、钢球5h、弹簧5i、端盖螺塞5j、端盖5k和端盖螺钉5l;
所述端盖5k两侧端面设置有圆柱型凸台5k1,内圆孔5k4的外侧端面压入带有环槽的第一衬套3,第一衬套3的环槽内安装密封圈2,内圆孔5k4内侧端面压入第二衬套4;
所述端盖5k整体为圆盘结构,圆盘的外侧端面设置有4个沉头孔5k3和3个铆钉孔5k11,4个沉头孔5k3用于将端盖组件5与壳体14连接,3个铆钉孔5k11用于将带组件5a与端盖组件5连接;圆盘内侧端面上设置有4个腰型凸台5k5,1个与内圆孔5k4一体设置矩形凸台5k10,4个腰型凸台5k5与4个机电式微动开关5d、4个开关支架5f通过端盖螺钉5l安装在腰型凸台5k5的螺纹孔5k6内,摇臂转轴5g穿过开关支架5f的孔与摇臂5e连接,摇臂5e开口端的螺纹孔内安装有端盖螺柱5b和端盖螺母5c,装配过程中通过端盖螺柱5b调节摇臂5e的开口大小,使得凸轮6转动时可碰触到摇臂5e开口外侧的凸起;矩形凸台5k10内设置有联通的螺纹孔5k8和通孔5k7,孔内依次安装有钢球5h、弹簧5i和端盖螺塞5j,钢球5h穿过第二衬套4的锥孔顶在手柄轴1b的弧形槽内1b1。
可选地,如上所述的航空电动铰车设备的手持控制器中,
所述第三衬套8和第四衬套10结构相同,均包括:具有矩形槽口的扇形凹槽,以及对称设置于扇形凹槽上的两个扇形凸台;第三衬套8与第四衬套10相对安装,矩形槽口相对安装,且第三衬套8的两个扇形凸台嵌入第四衬套10的扇形凹槽内,第四衬套10的两个扇形凸台嵌入第三衬套8的扇形凹槽内。
可选地,如上所述的航空电动铰车设备的手持控制器中,
所述第三衬套8安装在手柄轴1b的第四台阶轴1b4接近手柄1a一端的光轴上,第四衬套10方向与第三衬套8相对安装在第四台阶轴1b4远离手柄1a一端的光轴上,第四台阶轴1b4中间开设的螺纹孔1b5上安装螺柱9,螺柱9的端部凸出在第四台阶轴1b4的外部,手柄轴1b转动带动螺柱9的转动,从而碰触并带动第三衬套8或第四衬套10一起转动。
可选地,如上所述的航空电动铰车设备的手持控制器中,
所述手持控制器中设置有4个平面蜗卷弹簧7,左端控制模组中的2个平面蜗卷弹簧7与右端控制模组中的2个平面蜗卷弹簧7对称安装;
其中,每个控制模组中外侧的平面蜗卷弹簧7的一端卡在第三衬套8中的矩形槽口内,另一端卡在支架组件16的螺栓11外端,内侧的平面蜗卷弹簧7的一端卡在第四衬套10中的矩形槽口内,一端卡在支架组件16的螺栓11内端,并通过螺母12紧固两个平面蜗卷弹簧7。
可选地,如上所述的航空电动铰车设备的手持控制器中,还包括:外罩15;外罩15通过螺钉固定在壳体14上,外罩15上粘贴有电动铰车放出1速K1、放出2速k2、收回1速K3和收回2速K4的两套对称设置的标牌。
可选地,如上所述的航空电动铰车设备的手持控制器中,
所述手持控制器,用于在自由状态下,端盖组件5上的钢球5h通过弹簧5i压在手柄组件1手柄轴1b弧形槽1b1的中间槽内。
所述手持控制器,具体用于通过手柄组件1向放出1速K1转动时,带动凸轮6按压K1对应的第1个机电式微动开关,并发出放出1速的指令;松开手柄组件1使得手柄组件1在平面蜗卷弹簧7的作用下自动回到自由状态位置;还继续向放出2速K2转动时,带动凸轮6按压K2对应的第2个机电式微动开关,并发出放出2速的指令,松开手柄组件1使得手柄组件1在平面蜗卷弹簧7的作用下自动回到自由状态位置。
可选地,如上所述的航空电动铰车设备的手持控制器中,
所述手持控制器,具体用于通过手柄组件1向收回1速K3转动时,带动凸轮6按压K3对应的第3个机电式微动开关,并发出收回1速的指令;松开手柄组件1使得手柄组件1在平面蜗卷弹簧7的作用下自动回到自由状态位置;还继续向收回2速K4转动时,带动凸轮6按压K4对应的第4个机电式微动开关,并发出收回2速的指令,松开手柄组件1使得手柄组件1在平面蜗卷弹簧7的作用下自动回到自由状态位置。
可选地,如上所述的航空电动铰车设备的手持控制器中,
所述手持控制器,还用于通过其中一个控制模组控制其对应的电动铰车设备执行相应的操作,或者,同时通过两个控制模组控制其对应的电动铰车设备执行相应的操作,同时操作两个控制模组控制时,发出相同的指令或不同的指令。
本发明的优点:
本发明实施例提供一种航空电动铰车设备的手持控制器,通过左右两套对称设置的控制模组,将两台电动铰车控制指令集成为一体,大大简化了结构、缩小了体积、减轻了重量,通过平面蜗卷弹簧提供操纵感觉力,操作简单、可靠,采用全金属密封结构抗自然环境、机械环境和电磁干扰能力强。另外,采用该手持控制器,可以单独操纵一台电动铰车也可同时操纵两台电动铰车,提高了货运速率和能力,满足了航空货运系统的装卸货的要求。
附图说明:
附图用来提供对本发明技术方案的进一步理解,并且构成说明书的一部分,与本申请的实施例一起用于解释本发明的技术方案,并不构成对本发明技术方案的限制。
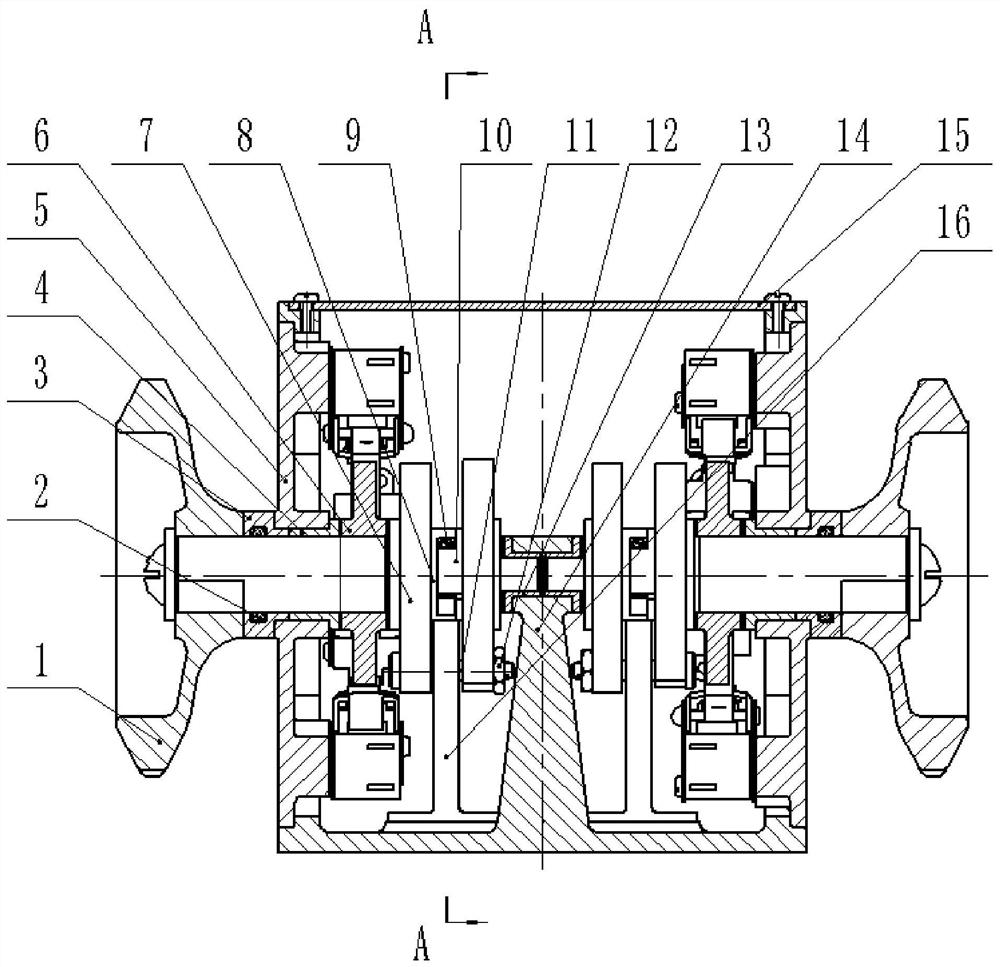
图1为本发明实施例提供的一种航空电动铰车设备的手持控制器的结构示意图;
图2为本发明实施例提供的航空电动铰车设备的手持控制器中手柄组件的结构示意图;
图3为本发明实施例提供的航空电动铰车设备的手持控制器中端盖组件的结构示意图;
图4为图3所示实施例中端盖组件的部分结构示意图;
图5为本发明实施例提供的航空电动铰车设备的手持控制器中第三衬套和第四衬套的装配结构示意图;
图6为本发明实施例提供的航空电动铰车设备的手持控制器中平面蜗卷弹簧的装配结构示意图;
图7为本发明实施例提供的航空电动铰车设备的手持控制器中部分部件的装配结构示意图。
具体实施方式:
为使本发明的目的、技术方案和优点更加清楚明白,下文中将结合附图对本发明的实施例进行详细说明。需要说明的是,在不冲突的情况下,本申请中的实施例及实施例中的特征可以相互任意组合。
本发明提供以下几个具体的实施例可以相互结合,对于相同或相似的概念或过程可能在某些实施例不再赘述。
为满足装卸货物的任务可靠性,航空电动铰车设备采用双余度设计,同时采用两台电动铰车设备提高装卸货运速率和能力。电动铰车设备中的手持控制器通常采用机械手持可移动式结构使得操纵变得简单、方便,并且手持控制器具有远距离控制电动绞车设备的能力。采用一台手持控制器将两台电动铰车控制指令集成为一体,大大简化了结构、缩小了体积、减轻了重量,通过平面蜗卷弹簧提供操纵感觉力,操作简单、可靠,采用全金属密封结构抗自然环境、机械环境和电磁干扰能力强。满足了航空货运系统的装卸货的要求。
图1为本发明实施例提供的一种航空电动铰车设备的手持控制器的结构示意图。如图1所示,本发明实施例提供的航空电动铰车设备的手持控制器,可以包括:壳体14,以壳体14的中心面对称安装的两个结构相同的控制模组,如图1所示,包括左端控制模组和右端控制模组。
本发明实施例中,每个控制模组,包括:手柄组件1、密封圈2、第一衬套3、第二衬套4、端盖组件5、凸轮6、2个平面蜗卷弹簧7、第三衬套8、螺柱9、第四衬套10、螺栓11、螺母12、第五衬套13、支架组件16。
本发明实施例中,壳体14的端部设置有端盖组件5,手柄组件1的手柄轴1b穿过端盖组件5的内圆孔,手柄轴1b从外侧到内侧依次安装有凸轮6、第三衬套8、螺柱9和第四衬套10,并通过第五衬套13将手柄轴1b的内端安装在壳体14中部的支撑座上;端盖组件5内侧安装的有4个机电式微动开关。
另外,壳体14的支撑座两侧分别设置有支架组件16,并通过第三衬套8和第四衬套10形成安装结构,与支架组件16上的螺栓11安装平面蜗卷弹簧7,并通过螺母12紧固;壳体14上还安装有电连接器。
基于本发明实施例中手持控制器的硬件结构,该手持控制器可以通过其中任一个控制模组向不同方向转动时,控制模组的手柄组件1带动凸轮6的转动,使得凸轮6按压端盖组件5上相应的机电式微动开关,从而向控制模组控制的电动铰车控制箱发出相应的控制指令,松开手柄组件1后恢复到自由状态,继续转动按压相同方向上的另一个机电式微动开关,并发出相应的控制指令。
以下通过对本发明实施例中各部件的详细描述,说明本发明实施例提供的航空电动铰车设备的手持控制器的具体实施方式。
图2为本发明实施例提供的航空电动铰车设备的手持控制器中手柄组件的结构示意图,图2的右图为主视图,左图为右视图。如图2所示,本发明实施例中的手柄组件1包括:手柄1a和手柄轴1b,手柄1a通过其上的扁孔与手柄轴1b上的扁轴连接,并通过螺钉紧固。
本发明实施例中的手柄轴1b设置为5段台阶轴,外端第一台阶轴为扁轴,与手柄1a上的扁孔连接;第二台阶轴1b2接近手柄1a一端的光轴(如图2中的左端光轴)上安装有密封圈2和第一衬套3;第二台阶轴1b2远离手柄1a一端的光轴(如图2中的右端光轴)端面上设置有3个弧形槽1b1,用于容纳端盖组件5中的钢球正常情况,钢球在中间弧形槽内,即开关断开位置;第三台阶轴1b3为扁轴,与凸轮6上的扁孔连接;第四台阶轴1b4为光轴,从外侧向内侧依次安装有第三衬套8、螺柱9和第四衬套10,且螺柱9可在第三衬套8和第四衬套10形成的窗口区域内转动;第五台阶轴1b6为光轴,通过与第五衬套13的配合安装在壳体14中部的支撑座上,左、右对称设置的两个手柄轴1b的第五台阶轴1b6共用第五衬套13。
实际应用中,第四台阶轴1b4接近手柄1a一端的(如图2中左端光轴)安装第三衬套8、中间开设的螺纹孔1b5上安装有螺柱9,远离手柄1a一端的(如图2中右端光轴)安装第四衬套10,第三衬套8和第四衬套10相对安装后形成一窗口区域,螺柱9位于该窗口区域内,且可以在该窗口区域内转动。
需要说明的是,第一台阶轴、第二台阶轴1b2和第三台阶轴1b3的圆柱部分直径相同;第四台阶轴1b4的直径小于第三台阶轴1b3的直径,第五台阶轴1b6的直径比小于第四台阶轴1b4的直径。
图3为本发明实施例提供的航空电动铰车设备的手持控制器中端盖组件的结构示意图,图4为图3所示实施例中端盖组件的部分结构示意图,图4的左图为主视图,右图为左图以A-A为剖线的截面图。参考图3和图4所示,本发明实施例中的端盖组件5包括:带组件5a、端盖螺柱5b、端盖螺母5c、机电式微动开关5d、设置为一端开口的摇臂5e、开关支架5f、摇臂转轴5g、钢球5h、弹簧5i、端盖螺塞5j、端盖5k和端盖螺钉5l。
本发明实施例中端盖5k两侧端面设置有圆柱型凸台5k1,内圆孔5k4的外侧端面压入带有环槽的第一衬套3,第一衬套3的环槽内安装密封圈2,内圆孔5k4内侧端面压入第二衬套4。
本发明实施例中端盖5k整体为圆盘结构,圆盘的外侧端面(如图4中左端面)设置有4个沉头孔5k3和3个铆钉孔5k11,4个沉头孔5k3用于将端盖组件5与壳体14连接,3个铆钉孔5k11用于将带组件5a与端盖组件5连接;圆盘内侧端面(如图4中左图)上设置有4个腰型凸台5k5,1个与内圆孔5k4一体设置矩形凸台5k10,4个腰型凸台5k5与4个机电式微动开关5d、4个开关支架5f通过端盖螺钉5l安装在腰型凸台5k5的螺纹孔5k6内,摇臂转轴5g穿过开关支架5f的孔与摇臂5e连接,摇臂5e开口端的螺纹孔内安装有端盖螺柱5b和端盖螺母5c,装配过程中通过端盖螺柱5b调节摇臂5e的开口大小,使得凸轮6转动时可碰触到摇臂5e开口外侧的凸起,即实现了调节凸轮6按压开关位置;矩形凸台5k10内设置有联通的螺纹孔5k8和通孔5k7,孔内依次安装有钢球5h、弹簧5i和端盖螺塞5j,钢球5h穿过第二衬套4的锥孔顶在手柄轴1b的弧形槽内1b1,即端盖组件5上的钢球5h通过弹簧5i压在弧形槽1b1内。
图5为本发明实施例提供的航空电动铰车设备的手持控制器中第三衬套和第四衬套的装配结构示意图。本发明实施例中第三衬套8和第四衬套10结构相同,均包括:具有矩形槽口的扇形凹槽,以及对称设置于扇形凹槽上的两个扇形凸台;第三衬套8与第四衬套10相对安装,矩形槽口相对安装,且第三衬套8的两个扇形凸台嵌入第四衬套10的扇形凹槽内,第四衬套10的两个扇形凸台嵌入第三衬套8的扇形凹槽内。
实际应用中,第三衬套8和第四衬套10在手柄轴1b上的装配方式为:第三衬套8安装在手柄轴1b的第四台阶轴1b4接近手柄1a一端的光轴(如图2中左端光轴)上,第四衬套10方向与第三衬套8相对安装在第四台阶轴1b4远离手柄1a一端的光轴(如图2中右端光轴)上,第四台阶轴1b4中间开设的螺纹孔1b5上安装螺柱9,螺柱9的端部凸出在第四台阶轴1b4的外部,手柄轴1b转动带动螺柱9的转动,从而碰触并带动第三衬套8或第四衬套10一起转动。
图6为本发明实施例提供的航空电动铰车设备的手持控制器中平面蜗卷弹簧的装配结构示意图,图6具体为图1所示实施例提供的航空电动铰车设备的手持控制器以A-A为剖线的局部结构示意图。本发明实施例的手持控制器中共有4个平面蜗卷弹簧7,参考图1和图6所示,本发明实施例中的左端控制模组中的2个平面蜗卷弹簧7与右端控制模组中的2个平面蜗卷弹簧7对称安装。
每个控制模组中外侧的平面蜗卷弹簧7的一端卡在第三衬套8中的矩形槽口内,另一端卡在支架组件16的螺栓11外端,内侧的平面蜗卷弹簧7的一端卡在第四衬套10中的矩形槽口内,一端卡在支架组件16的螺栓11内端,并通过螺母12紧固两个平面蜗卷弹簧7。
如图7所示,为本发明实施例提供的航空电动铰车设备的手持控制器中部分部件的装配结构示意图,图7中示意出了第三衬套8、第四衬套10,以及2个平面蜗卷弹簧7与手柄轴1b和支架组件16的装配关系。
如图1所示,本发明实施例中的手持控制器,还可以包括:外罩15;外罩15通过螺钉固定在壳体14上,外罩15上粘贴有电动铰车放出1速K1、放出2速k2、收回1速K3和收回2速K4的两套对称设置的标牌。
以下对本发明上述实施例提供的航空电动铰车设备的手持控制器的工作方式进行详细说明。
自由状态下,端盖组件5上的钢球5h通过弹簧5i压在手柄组件1手柄轴1b弧形槽1b1的中间槽内。
放出操作方式:旋转手柄组件1向放出1速K1指示的方向转动,手柄组件1带动凸轮6转动,通过凸轮6按压端盖组件5上K1对应的摇臂5e,摇臂5e以开关支架5f上的摇臂转轴5g为中心转动,摇臂5e按压K1对应的第1个机电式微动开关5d,通过第1个机电式微动开关5d动作向电动铰车控制箱发出放出1速的指令,同时,手柄组件1手柄轴1b上的螺柱9带动第三衬套8和平面蜗卷弹簧7转动,通过平面蜗卷弹簧7提供转动的感觉力;上述过程到达放出1速位置时,端盖组件5上的钢球5h压在手柄组件1手柄轴1b弧形槽1b1的一个侧面槽内例如左侧槽内。
随后具有两种操作方式:一方面,松开手柄组件1,手柄组件1在平面蜗卷弹簧7的作用下自动回到自由状态位置;另一方面,继续向放出2速K2指示的方向转动,手柄组件1带动凸轮6继续转动,通过凸轮6按压端盖组件5上K2对应的摇臂5e,摇臂5e以开关支架5f上的摇臂转轴5g为中心转动,摇臂5e按压K2对应的第2个机电式微动开关5d,通过第2个机电式微动开关5d动作向电动铰车控制箱发出放出2速的指令,松开手柄组件1,手柄组件1在平面蜗卷弹簧7的作用下自动回到自由状态位置。
收回操作方式:旋转手柄组件1向收回1速K3指示的方向转动,手柄组件1带动凸轮6转动,通过凸轮6按压端盖组件5上K1对应的摇臂5e,摇臂5e以开关支架5f上的摇臂转轴5g为中心转动,摇臂5e按压K3对应的第3个机电式微动开关5d,通过第3个机电式微动开关5d动作向电动铰车控制箱发出收回1速的指令,同时,手柄组件1手柄轴1b上的螺柱9带动第四衬套10和平面蜗卷弹簧7转动,通过平面蜗卷弹簧7提供转动的感觉力;上述过程到达收回1速位置时,端盖组件5上的钢球5h压在手柄组件1手柄轴1b弧形槽1b1的另一个侧面槽内例如右侧槽内。
随后具有两种操作方式:一方面,松开手柄组件1,手柄组件1在平面蜗卷弹簧7的作用下自动回到自由状态位置;另一方面,继续向收回2速K4指示的方向转动,手柄组件1带动凸轮6继续转动,通过凸轮6按压端盖组件5上K4对应的摇臂5e,摇臂5e以开关支架5f上的摇臂转轴5g为中心转动,摇臂5e按压K4对应的第4个机电式微动开关5d,通过第4个机电式微动开关5d动作向电动铰车控制箱发出收回2速的指令,松开手柄组件1,手柄组件1在平面蜗卷弹簧7的作用下自动回到自由状态位置。
需要说明的是,本发明实施例提供的手持控制器,可以单独采用其中一个控制模组控制其对应的电动铰车设备执行相应的操作,也可以,同时采用两个控制模组控制其对应的电动铰车设备执行相应的操作,同时操作两个控制模组控制时,可以操作两个控制模组发出相同的指令或不同的指令。
本发明实施例提供的航空电动铰车设备的手持控制器,通过左右两套对称设置的控制模组,将两台电动铰车控制指令集成为一体,大大简化了结构、缩小了体积、减轻了重量,通过平面蜗卷弹簧提供操纵感觉力,操作简单、可靠,采用全金属密封结构抗自然环境、机械环境和电磁干扰能力强。另外,采用该手持控制器,可以单独操纵一台电动铰车也可同时操纵两台电动铰车,提高了货运速率和能力,满足了航空货运系统的装卸货的要求。
虽然本发明所揭露的实施方式如上,但的内容仅为便于理解本发明而采用的实施方式,并非用以限定本发明。任何本发明所属领域内的技术人员,在不脱离本发明所揭露的精神和范围的前提下,可以在实施的形式及细节上进行任何的修改与变化,但本发明的专利保护范围,仍须以所附的权利要求书所界定的范围为准。
- 一种航空电动铰车设备的手持控制器
- 一种航空电动铰车设备的手持控制器