激光雷达装置
文献发布时间:2023-06-19 09:29:07
技术领域
本发明涉及利用激光获得对象体的距离信息的激光雷达装置。更具体来讲,本发明涉及通过向扫描区域照射激光并感测从位于所述扫描区域上的对象体反射的激光获得距离信息的激光雷达装置。
背景技术
激光雷达装置(LiDAR:Light Detecting And Ranging)是利用激光探测与对象体之间的距离的装置。并且,激光雷达装置是能够生成利用激光的点云(Point cloud)以获得位于周边的事物的位置信息的装置。并且,对利用激光雷达装置的气象观测、三维映射(3Dmapping)、自动驾驶车辆、自动驾驶无人机及无人机器人传感器等的研究也在非常活跃地展开。
现有的激光雷达装置是以机械方式旋转激光雷达装置本身或利用扩散透镜扩张扫描区域。然而以机械方式旋转激光雷达装置本身的情况下存在从多个激光发生的热问题,以及机械方式旋转所引起的稳定性、耐久性等问题。并且利用扩散透镜扩张扫描区域的激光雷达装置的情况下,存在激光扩散导致测定距离减小的问题。
近来为了解决这种问题,在不断进行关于在不机械性旋转激光雷达装置本身也能扩张扫描区域且提高激光雷达装置的性能的研究。
发明内容
技术问题
一个实施例要解决的技术问题涉及一种仅凭单通道的激光也能够具有期望的扫描区域的激光雷达装置。
又一个实施例要解决的技术问题涉及不扩散激光且用最小程度的电力也能够感测更远距离处的对象体的激光雷达装置。
又一个实施例要解决的技术问题涉及通过增加受光的激光的量用最小程度的电力感测更远距离处的对象体的激光雷达装置。
又一个实施例要解决的技术问题涉及通过摆动镜的配置以高效地感测对象体的激光雷达装置。
又一个实施例要解决的技术问题涉及生成多种扫描图案的激光雷达装置。
本发明要解决的技术问题不限于上述技术问题,本发明所属技术领域的普通技术人员能够通过本说明书及附图明确理解未提及的其他技术问题。
技术方案
一个实施例的激光雷达装置是利用激光测定距离的激光雷达装置,包括:射出激光的激光输出部、获得所述激光输出部射出的激光且持续变更所述激光的移动路径以将照射区域扩张成线形态的第一扫描部、获得从所述第一扫描部照射的照射区域为线形态的激光且持续变更移动路径以将扫描区域扩张成面形态的第二扫描部及感测被位于所述扫描区域上的对象体反射的激光的传感器部,所述第一扫描部包括在预设角度范围摆动且将所述激光的移动路径变更为垂直方向以将照射区域扩张成垂直方向的线形态的摆动镜,所述第二扫描部可包括随着以向垂直方向设定的一个轴为基准旋转将将所述照射区域为垂直方向的线形态的激光的移动路径变更为水平方向以此将扫描区域扩张成面形态的旋转多面镜。
根据又一实施例的激光雷达装置是利用激光测定距离的激光雷达装置,包括:射出激光的激光输出部、获得所述激光输出部射出的激光且持续变更所述激光的移动路径以将照射区域扩张成线形态的第一扫描部、获得从所述第一扫描部照射的照射区域为线形态的激光且持续变更移动路径以将扫描区域扩张成面形态的第二扫描部及感测位于所述扫描区域上的对象体反射的激光的传感器部,所述激光雷达装置具有所述激光输出部射出的激光到达位于扫描区域上的对象体的照射路径及被所述扫描区域上的对象体反射的激光到达所述传感器部的受光路径,所述照射路径被设置成依次通过所述第一扫描部及所述第二扫描部并朝向所述扫描区域,所述受光路径可被设置成通过所述第一扫描部及所述第二扫描部中所述第二扫描部并朝向所述传感器部。
根据又一实施例的激光雷达装置中利用的旋转多面镜包括结合于驱动部获得传递过来的驱动力进行旋转的主体及用于反射获得的激光的反射面,所述主体包括上部、下部及连接所述上部与下部的柱,以垂直贯通所述上部及所述下部的中心的旋转轴为中心旋转,所述反射面位于除所述主体的上部及下部以外的侧面,包括用于获得为了测定距离而射出的激光并向扫描区域反射的照射部分及用于获得被位于所述扫描区域上的对象体反射的激光并进行反射的受光部分。
根据一个实施例的激光雷达装置是利用激光测定距离的激光雷达装置,包括:射出激光的激光输出部、获得所述激光输出部射出的激光并反射以持续变更所述激光的移动路径扩张照射区域的扫描部、感测被位于扫描区域上的对象体反射的激光的传感器部;所述扫描部包括摆动镜,所述摆动镜包括在预设角度-在此,预设角度是指所述摆动镜在偏移状态下摆动的角度-范围摆动,通过变更所述激光的移动路径扩张照射区域的反射面,所述反射面可具有所述激光输出部射出的激光的最大直径以下的大小。
根据又一实施例的激光雷达装置是利用激光测定距离的激光雷达装置,包括:射出激光的激光输出部、用于获得所述激光输出部射出的激光并持续变更所述激光的移动路径以将照射区域扩张成线形态的第一扫描部、获得从所述第一扫描部照射的照射区域为线形态的激光并持续变更移动路径以将照射区域扩张成面形态的第二扫描部及感测被位于扫描区域上的对象体反射的激光的传感器部,所述第一扫描部包括摆动镜,所述摆动镜包括在预设角度-在此,预设角度是指所述摆动镜在偏移状态下摆动的角度-范围摆动,通过变更所述激光的移动路径扩张照射区域的反射面,所述反射面具有所述激光输出部射出的激光的最大直径以下的大小,所述第二扫描部可包括随着以向垂直方向设置的一个轴为基准旋转将所述照射区域为垂直方向的线形态的激光的移动路径变更为水平方向以将照射区域扩张成面形态的旋转多面镜。
根据又一实施例的摆动镜包括在预设角度-其中,预设角度是指所述摆动镜在偏移状态下摆动的角度-范围摆动的主体及用于反射获得的所述激光的反射面,所述反射面可具有激光的最大直径以下的大小。
根据又一实施例的激光雷达装置是利用激光测定距离的激光雷达装置,包括:射出激光的激光输出部、获得并反射所述激光输出部射出的激光持续变更所述激光的移动路径以扩张照射区域的扫描部、感测位于扫描区域上的对象体反射的激光的传感器部,所述扫描部包括摆动镜,所述摆动镜包括在预设角度-在此,预设角度是指所述摆动镜在偏移状态下摆动的角度-范围摆动,通过变更所述激光的移动路径扩张照射区域的反射面,所述激光雷达的最大可测定距离可随着所述摆动镜的摆动连续变更。
根据又一实施例的激光雷达装置是利用激光测定距离的激光雷达装置,包括:射出激光的激光输出部、照射所述激光输出部射出的激光且生成扫描图案的扫描部、感测包含于作为所述激光雷达装置的可扫描区域的扫描区域的对象体反射的激光的传感器部,从所述激光雷达装置照射的激光的方向包括水平方向成分及垂直方向成分,所述扫描图案示出随着时间变更的所述激光照射方向的反复形态,所述扫描图案包括作为水平方向图案的水平图案及作为垂直方向图案的垂直图案,所述水平图案及所述垂直图案分别包括最大值、最小值及反复形成视角的周期,所述水平图案是在所述水平图案的周期内所述水平方向成分随着时间增加的形态,所述垂直图案是在所述垂直图案周期内所述垂直方向成分随着时间减少及增加的形态,所述水平图案周期可以比所述垂直图案周期长。
根据又一实施例的激光雷达装置是利用激光测定距离的激光雷达装置,包括:射出激光的激光输出部、照射所述激光输出部射出的激光且生成扫描图案的扫描部、感测包含于作为所述激光雷达装置的可扫描区域的扫描区域中的对象体反射的激光的传感器部,从所述激光雷达装置照射的激光的方向包括水平方向成分及垂直方向成分,所述扫描图案示出随着时间变更的所述激光的照射方向的反复形态,所述扫描图案包括作为水平方向图案的水平图案及作为垂直方向图案的垂直图案,所述水平图案及所述垂直图案分别包括最大值、最小值及反复形成视角的周期,所述水平图案是在所述水平图案的周期内所述水平方向成分随着时间增加的形态,所述垂直图案是在所述垂直图案周期内所述垂直方向成分随着时间减少及增加的形态,所述垂直图案周期可长于所述水平图案周期。
根据又一实施例的激光雷达装置是利用激光测定距离的激光雷达装置,包括:射出激光的激光输出部、获得所述激光输出部射出的激光并持续变更所述激光的移动路径以将照射区域扩张成线形态的第一扫描部、获得从所述第一扫描部照射的照射区域为线形态的激光并持续变更移动路径以将照射区域扩张成面形态的第二扫描部及感测被位于扫描区域上的对象体反射的激光的传感器部,所述第一扫描部包括在预设角度范围摆动且通过将所述激光的移动路径变更为垂直方向以将照射区域扩张成垂直方向的线形态的摆动镜,所述第二扫描部包括随着以向垂直方向设置的一个轴为基准旋转将所述照射区域为垂直方向的线形态的激光的移动路径变更为水平方向以将照射区域扩张成面形态的旋转多面镜,所述摆动镜的摆动速度可快于所述旋转多面镜的旋转速度。
本发明的技术方案不限于以上技术方案,本发明所属技术领域的普通技术人员能够通过本说明书及附图明确理解未提及的其他技术方案。
技术效果
一个实施例的激光雷达装置将旋转多面镜用于扩张扫描区域,从而仅凭单通道的激光也能够扩张扫描区域。
并且另一实施例的激光雷达装置通过变更激光的移动方向扩张扫描区域,从而能够用最小程度的电力感测更远距离处的对象体。
并且另一实施例的激光雷达装置将旋转多面镜用于受光,从而能够通过增加受光的激光的量,用最小程度的电力感测更远距离处的对象体。
又一个实施例的激光雷达装置可利用摆动镜不同的配置下反射的激光量的差异高效地感测对象体。
本发明的效果不限于以上效果,本发明所属技术领域的普通技术人员能够通过本说明书及附图明确理解未提及的其他效果。
附图说明
图1为示出一个实施例的激光雷达装置的框图;
图2为用于说明一个实施例的激光雷达装置中扫描部的功能的示意图;
图3为示出另一实施例的激光雷达装置的框图;
图4为一个实施例的激光雷达装置的示意图;
图5为用于说明一个实施例的旋转多面镜的示意图;
图6为用于说明反射面的数量为三个且主体的上部及下部为正三角形形态的旋转多面镜的视角的俯视图;
图7为用于说明反射面的数量为四个且主体的上部及下部为正方形形态的旋转多面镜的视角的俯视图;
图8为用于说明反射面的数量为五个且主体的上部及下部为正五角形形态的旋转多面镜的视角的俯视图;
图9为用于说明一个实施例的旋转多面镜的照射部分及受光部分的示意图;
图10为用于说明另一实施例的旋转多面镜的照射部分及受光部分的示意图;
图11为用于说明又一个实施例的旋转多面镜的照射部分及受光部分的示意图;
图12为用于说明一个实施例的旋转多面镜的照射部分及受光部分的位置关系的示意图;
图13为用于说明另一实施例的旋转多面镜的照射部分及受光部分的位置关系的示意图;
图14为用于说明一个实施例的旋转多面镜的高度的示意图;
图15为用于说明另一实施例的旋转多面镜的高度的示意图;
图16为用于说明又一个实施例的旋转多面镜的高度的示意图;
图17为用于说明一个实施例的包括光切断部的旋转多面镜的示意图;
图18为用于示出一个实施例的摆动镜的示意图;
图19为用于说明一个实施例的摆动镜反射的激光的量的示意图;
图20为用于说明一个实施例的摆动镜反射的激光量的差异小的摆动镜的配置的示意图;
图21为用于说明一个实施例的摆动镜反射的激光量的差异大的摆动镜的配置的示意图;
图22为用于说明一个实施例的用于防止摆动镜反射的激光返回的摆动镜的配置的示意图;
图23为用于说明与摆动镜的摆动角度及距离对应的激光雷达装置的照射区域的大小的示意图;
图24为用于说明一个实施例的激光雷达装置的视角的示意图;
图25为用于说明一个实施例的所述摆动镜的偏移状态与入射到所述摆动镜的激光之间的角度a的变更方法的示意图;
图26为用于说明另一实施例的所述摆动镜的偏移状态与入射到所述摆动镜的激光之间的角度a的变更方法的示意图;
图27为用于说明一个实施例的还包括配置于摆动镜周边的反射镜的激光雷达装置的示意图;
图28为用于示出一个实施例的激光雷达装置及从激光雷达装置照射的激光的方向的示意图;
图29为用坐标图示出一个实施例的激光雷达装置的扫描图案的示意图;
图30为按各成分及时间用坐标图示出一个实施例的激光雷达装置的扫描图案的示意图;
图31为按各成分及时间用坐标图示出另一实施例激光雷达装置的扫描图案的示意图;
图32为按各成分及时间用坐标图示出又一个实施例的激光雷达装置的扫描图案的示意图;
图33为按各成分及时间用坐标图示出又一个实施例的激光雷达装置的扫描图案的示意图;
图34为用坐标图示出又一个实施例的激光雷达装置的1帧时长的扫描图案的示意图;
图35为按各成分及时间用坐标图示出又一个实施例的激光雷达装置的扫描图案的示意图;
图36为用坐标图示出又一个实施例的激光雷达装置的1帧时长的扫描图案的示意图;
图37为按各成分及时间用坐标图示出又一个实施例的激光雷达装置的扫描图案的示意图;
图38为按各成分及时间用坐标图示出又一个实施例的激光雷达装置的扫描图案的示意图;
图39为用坐标图示出又一个实施例的激光雷达装置的扫描图案的坐标图;
图40为按各成分及时间用坐标图示出又一个实施例的激光雷达装置的扫描图案的示意图;
图41为按各成分及时间用坐标图示出又一个实施例的激光雷达装置的扫描图案的示意图;
图42为用坐标图示出又一个实施例的激光雷达装置的扫描图案的示意图;
图43为一个实施例的激光雷达装置的旋转多面镜的示意图。
具体实施方式
本说明书记载的实施例用于向本发明所属技术领域的普通技术人员明确说明本发明的思想,本发明不限于本说明书记载的实施例,应理解本发明的范围包括不超出本发明的思想的修改例或变形例。
本说明书中使用的术语是考虑在本发明中的功能而尽可能选择的当前广泛使用的术语,但其随着本发明所属技术领域的普通技术人员的意图、判例或新技术的出现等而改变。但不同于此的将特定术语定义为任意意思使用的情况下,将会专门记载该术语的意思。因此本说明书中使用的术语并不是单纯的术语的名称,而是应根据该术语所具有的实质性意思及本说明书全篇的内容进行解释。
本说明书中的附图旨在轻易地说明本发明,附图中所示的形状可能是为了帮助理解本发明而扩张示出的,因此本发明不局限于附图。
在本说明书中当判断认为对于本发明相关的公知构成或功能的具体说明能够混淆本发明的主旨的情况下将根据需要省略与之相关的具体说明。
根据一个实施例,可提供一种激光雷达装置,是利用激光测定距离的激光雷达装置,包括:射出激光的激光输出部、获得所述激光输出部射出的激光且持续变更所述激光的移动路径以将照射区域扩张成线形态的第一扫描部、获得从所述第一扫描部照射的照射区域为线形态的激光且持续变更移动路径以将扫描区域扩张成面形态的第二扫描部及感测被位于所述扫描区域上的对象体反射的激光的传感器部,所述第一扫描部包括在预设角度范围摆动且将所述激光的移动路径变更为垂直方向以将照射区域扩张成垂直方向的线形态的摆动镜,所述第二扫描部包括随着以向垂直方向设定的一个轴为基准旋转将将所述照射区域为垂直方向的线形态的激光的移动路径变更为水平方向以此将扫描区域扩张成面形态的旋转多面镜。
其中,所述激光雷达装置具有所述激光输出部射出的激光到达位于扫描区域上的对象体的照射路径及被位于所述扫描区域上的对象体反射的激光到达所述传感器部的受光路径,所述照射路径被设置成依次通过所述摆动镜及所述旋转多面镜并朝向所述扫描区域,所述受光路径可被设置成只通过所述摆动镜及所述旋转多面镜中所述旋转多面镜朝向所述传感器部。
其中,所述旋转多面镜包括用于获得从所述摆动镜照射的照射区域为线形态的激光并向所述扫描区域反射的照射部分及用于获得从位于所述扫描区域上的对象体反射的激光并向所述传感器部反射的受光部分,所述照射部分为向所述旋转多面镜的旋转方向连接从所述摆动镜照射的激光的照射区域与所述旋转多面镜相遇的线的面形态,所述受光部分可以是向所述旋转多面镜的旋转方向延伸所述旋转多面镜的反射面中反射使得向所述传感器部传递的一部分的面形态。
其中,所述旋转多面镜的所述照射部分包含于所述照射路径,所述旋转多面镜的所述受光部分可包含于所述受光路径。
其中,所述旋转多面镜的所述受光部分的大小可被设置成至少大于所述旋转多面镜的所述照射部分的大小。
其中,所述照射部分及所述受光部分中任意一个位于与所述旋转多面镜的旋转轴垂直的假想剖面的上侧,所述照射部分及所述受光部分中另一个可位于与所述旋转多面镜的旋转轴垂直的假想剖面的下侧。
其中,所述照射部分与所述受光部分可相隔配置。
其中,所述旋转多面镜的高度可至少大于相加所述旋转多面镜的所述照射部分的高度及所述受光部分的高度的值。
其中,所述照射部分的高度可取决于所述摆动镜的预设角度范围及所述摆动镜与所述旋转多面镜之间的距离。
其中,所述受光部分的高度可取决于所述传感器部的大小。
根据另一实施例,提供一种旋转多面镜,是用于利用激光测定距离的激光雷达装置的旋转多面镜,包括结合于驱动部获得传递过来的驱动力进行旋转的主体及用于反射获得的激光的反射面,所述主体包括上部、下部及连接所述上部与下部的柱,以垂直贯通所述上部及所述下部的中心的旋转轴为中心旋转,所述反射面位于除所述主体的上部及下部以外的侧面,包括用于获得为了测定距离而射出的激光并向扫描区域反射的照射部分及用于获得被位于所述扫描区域上的对象体反射的激光并进行反射的受光部分。
其中,所述旋转多面镜的所述受光部分的大小可至少大于所述旋转多面镜的所述照射部分的大小。
其中,所述旋转多面镜的所述照射部分及所述受光部分可以是以垂直于所述旋转多面镜的所述旋转轴的假想剖面为基准分开设置的。
其中,所述旋转多面镜的高度可至少大于相加所述旋转多面镜的所述照射区域的高度及所述旋转多面镜的所述受光区域的高度的值。
根据又一实施例,提供一种激光雷达装置,是利用激光测定距离的激光雷达装置,包括:射出激光的激光输出部、获得所述激光输出部射出的激光且持续变更所述激光的移动路径以将照射区域扩张成线形态的第一扫描部、获得从所述第一扫描部照射的照射区域为线形态的激光且持续变更移动路径以将扫描区域扩张成面形态的第二扫描部及感测位于所述扫描区域上的对象体反射的激光的传感器部,所述激光雷达装置具有所述激光输出部射出的激光到达位于扫描区域上的对象体的照射路径及被所述扫描区域上的对象体反射的激光到达所述传感器部的受光路径,所述照射路径被设置成依次通过所述第一扫描部及所述第二扫描部并朝向所述扫描区域,所述受光路径被设置成通过所述第一扫描部及所述第二扫描部中所述第二扫描部并朝向所述传感器部。
其中,所述第二扫描部可包括随着以向垂直方向设置的一个轴为基准旋转将所述照射区域为垂直方向的线形态的激光的移动路径变更为水平方向以将扫描区域扩张成面形态的旋转多面镜。
其中,所述旋转多面镜包括用于获得从所述第一扫描部照射的照射区域为线形态的激光并向所述扫描区域反射的照射部分及用于获得被位于所述扫描区域上的对象体反射的激光并向所述传感器部反射的受光部分,所述照射部分为向所述旋转多面镜的旋转方向连接从所述第一扫描部照射的激光的照射区域与所述旋转多面镜相遇的线的面形态,所述受光部分是向所述旋转多面镜的旋转方向延伸所述旋转多面镜的反射面中反射使得向所述传感器部传递的一部分的形态,所述旋转多面镜的所述照射部分包含于所述照射路径,所述旋转多面镜的所述受光部分可包含于所述受光路径。
其中,所述旋转多面镜的所述受光部分的大小可至少大于所述旋转多面镜的所述照射部分的大小。
其中,所述照射部分及所述受光部分中任意一个位于与所述旋转多面镜的旋转轴垂直的假想剖面的上侧,所述照射部分及所述受光部分中另一个可位于与所述旋转多面镜的旋转轴垂直的假想剖面的下侧。
其中,所述旋转多面镜的高度至少大于相加所述旋转多面镜的所述照射部分的高度及所述受光部分的高度的值,所述照射部分的高度取决于所述第一扫描部与所述旋转多面镜之间的距离及从所述第一扫描部到所述照射区域的角度,所述受光区域的高度可取决于所述感测部的大小。
根据一个实施例,可提供一种激光雷达装置,是利用激光测定距离的激光雷达装置,包括:射出激光的激光输出部、获得所述激光输出部射出的激光并反射以持续变更所述激光的移动路径扩张照射区域的扫描部、感测被位于扫描区域上的对象体反射的激光的传感器部;所述扫描部包括摆动镜,所述摆动镜包括在预设角度-在此,预设角度是指所述摆动镜在偏移状态下摆动的角度-范围摆动,通过变更所述激光的移动路径扩张照射区域的反射面,所述反射面具有所述激光输出部射出的激光的最大直径以下的大小。
其中,关于所述摆动镜,为了使得所述摆动镜在偏移状态下摆动-b/2度的状态下反射的激光量与所述摆动镜在所述偏移状态下摆动+b/2度的状态下所述摆动镜反射的激光量的差异为T%以下,所述摆动镜的偏移状态与入射到所述摆动镜的激光之间的角度a能够通过数学式
其中,为了防止所述激光输出部射出的激光返回所述激光输出部,可以将所述摆动镜的所述角度a确定为90-b/2-在此,b表示预设角度-以下。
其中,关于所述摆动镜,为了使得所述摆动镜在偏移状态下摆动-b/2度的状态下反射的激光量与所述摆动镜在所述偏移状态下摆动+b/2度的状态下所述摆动镜反射的激光量的差异为U%以上,所述摆动镜的偏移状态与入射到所述摆动镜的激光之间的角度a能够通过数学式
其中,所述摆动镜的预设角度可根据设置有所述激光雷达装置的移动体的速度变化。
其中,所述摆动镜的预设角度可根据所述激光雷达装置的1帧变化。
根据另一实施例,可提供一种激光雷达装置,是利用激光测定距离的激光雷达装置,包括:射出激光的激光输出部、用于获得所述激光输出部射出的激光并持续变更所述激光的移动路径以将照射区域扩张成线形态的第一扫描部、获得从所述第一扫描部照射的照射区域为线形态的激光并持续变更移动路径以将照射区域扩张成面形态的第二扫描部及感测被位于扫描区域上的对象体反射的激光的传感器部,所述第一扫描部包括摆动镜,所述摆动镜包括在预设角度-在此,预设角度是指所述摆动镜在偏移状态下摆动的角度-范围摆动,通过变更所述激光的移动路径扩张照射区域的反射面,所述反射面具有所述激光输出部射出的激光的最大直径以下的大小,所述第二扫描部包括随着以向垂直方向设置的一个轴为基准旋转将所述照射区域为垂直方向的线形态的激光的移动路径变更为水平方向以将照射区域扩张成面形态的旋转多面镜。
其中,关于所述摆动镜,为了使得所述摆动镜在偏移状态下摆动-b/2度的状态下反射的激光量与所述摆动镜在所述偏移状态下摆动+b/2度的状态下所述摆动镜反射的激光量的差异为T%以下,所述摆动镜的偏移状态与入射到所述摆动镜的激光之间的角度a能够通过数学式
其中,为了防止所述激光输出部射出的激光返回所述激光输出部,可将所述摆动镜的所述角度a确定为90-b/2-其中,b表示预设角的度-以下。
其中,关于所述摆动镜,为了使得所述摆动镜在偏移状态下摆动-b/2度的状态下反射的激光量与所述摆动镜在所述偏移状态下摆动+b/2度的状态下所述摆动镜反射的激光量的差异为U%以上,所述摆动镜的偏移状态与入射到所述摆动镜的激光之间的角度a能够通过数学式
其中,所述摆动镜的预设角度可根据设置有所述激光雷达装置的移动体的速度变化。
其中,所述摆动镜的预设角度可根据所述旋转多面镜的旋转变化。
其中,所述旋转多面镜的侧面有N个的情况下,所述摆动镜的预设角度可根据所述旋转多面镜旋转1/N发生变化。
根据又一实施例,可提供一种摆动镜,是在所述激光雷达装置内部获得及反射所述激光以在所述激光雷达装置的内部持续变更所述激光的移动路径,以扩张从所述激光雷达装置向外部射出的激光的照射区域的摆动镜,包括:在预设角度-其中,预设角度是指所述摆动镜在偏移状态下摆动的角度-范围摆动的主体及用于反射获得的所述激光的反射面,所述反射面具有激光的最大直径以下的大小。
其中,关于所述摆动镜,为了使得所述摆动镜在偏移状态下摆动-b/2度的状态下反射的激光量与所述摆动镜在所述偏移状态下摆动+b/2度的状态下所述摆动镜反射的激光量的差异为T%以下,所述摆动镜的偏移状态与入射到所述摆动镜的激光之间的角度a能够通过数学式
其中,关于所述摆动镜,为了使得所述摆动镜在偏移状态下摆动-b/2度的状态下反射的激光量与所述摆动镜在所述偏移状态下摆动+b/2度的状态下所述摆动镜反射的激光量的差异为U%以上,所述摆动镜的偏移状态与入射到所述摆动镜的激光之间的角度a能够通过数学式
根据又一实施例,可提供一种激光雷达装置,是利用激光测定距离的激光雷达装置,包括:射出激光的激光输出部、获得并反射所述激光输出部射出的激光持续变更所述激光的移动路径以扩张照射区域的扫描部、感测位于扫描区域上的对象体反射的激光的传感器部,所述扫描部包括摆动镜,所述摆动镜包括在预设角度-在此,预设角度是指所述摆动镜在偏移状态下摆动的角度-范围摆动,通过变更所述激光的移动路径扩张照射区域的反射面,所述激光雷达的最大可测定距离随着所述摆动镜的摆动连续变更。
根据一个实施例,可提供一种激光雷达装置,是利用激光测定距离的激光雷达装置,包括:射出激光的激光输出部、照射所述激光输出部射出的激光且生成扫描图案的扫描部、感测包含于作为所述激光雷达装置的可扫描区域的扫描区域的对象体反射的激光的传感器部,从所述激光雷达装置照射的激光的方向包括水平方向成分及垂直方向成分,所述扫描图案示出随着时间变更的所述激光照射方向的反复形态,所述扫描图案包括作为水平方向图案的水平图案及作为垂直方向图案的垂直图案,所述水平图案及所述垂直图案分别包括最大值、最小值及反复形成视角的周期,所述水平图案是在所述水平图案的周期内所述水平方向成分随着时间增加的形态,所述垂直图案是在所述垂直图案周期内所述垂直方向成分随着时间减少及增加的形态,所述水平图案周期比所述垂直图案周期长。
其中,所述水平图案可具有所述水平方向成分具有最大值及最小值的中间值时所述水平方向成分的随时间的变化速度比所述水平方向成分具有最大值或最小值时所述水平方向成分的随时间的变化速度慢的形态。
其中,所述垂直图案可具有所述垂直方向成分随着时间变成正弦波形状(Sinusoidal)的形态。
其中,所述水平图案周期包括第一水平图案周期及第二水平图案周期,所述垂直图案包括所述第一水平图案周期期间生成的第一垂直图案及所述第二水平图案周期期间生成的第二垂直图案,所述第一垂直图案的最大值及最小值的差异可大于所述第二垂直图案的最大值及最小值的差异。
其中,特征可以是所述水平图案周期包括第一水平图案周期及第二水平图案周期,所述垂直图案包括所述第一水平图案周期期间生成的第一垂直图案及所述第二水平图案周期期间生成的第二垂直图案,
所述第一垂直图案的中间值大于所述第二垂直图案的中间值。
根据另一实施例,可提供一种激光雷达装置,是利用激光测定距离的激光雷达装置,包括:射出激光的激光输出部、照射所述激光输出部射出的激光且生成扫描图案的扫描部、感测包含于作为所述激光雷达装置的可扫描区域的扫描区域中的对象体反射的激光的传感器部,从所述激光雷达装置照射的激光的方向包括水平方向成分及垂直方向成分,所述扫描图案示出随着时间变更的所述激光的照射方向的反复形态,所述扫描图案包括作为水平方向图案的水平图案及作为垂直方向图案的垂直图案,所述水平图案及所述垂直图案分别包括最大值、最小值及反复形成视角的周期,所述水平图案是在所述水平图案的周期内所述水平方向成分随着时间增加的形态,所述垂直图案是在所述垂直图案周期内所述垂直方向成分随着时间减少及增加的形态,所述垂直图案周期长于所述水平图案周期。
其中,特征可以是所述水平图案具有所述水平方向成分具有最大值及最小值的中间值时所述水平方向成分的随时间的变化速度比所述水平方向成分具有最大值或最小值时所述水平方向成分的随时间的变化速度慢的形态。
其中,特征可以是所述垂直图案具有所述垂直方向成分随着时间变成正弦波形状(Si nusoidal)的形态。
根据又一实施例,可提供一种激光雷达装置,是利用激光测定距离的激光雷达装置,包括:射出激光的激光输出部、获得所述激光输出部射出的激光并持续变更所述激光的移动路径以将照射区域扩张成线形态的第一扫描部、获得从所述第一扫描部照射的照射区域为线形态的激光并持续变更移动路径以将照射区域扩张成面形态的第二扫描部及感测被位于扫描区域上的对象体反射的激光的传感器部,所述第一扫描部包括在预设角度范围摆动且通过将所述激光的移动路径变更为垂直方向以将照射区域扩张成垂直方向的线形态的摆动镜,所述第二扫描部包括随着以向垂直方向设置的一个轴为基准旋转将所述照射区域为垂直方向的线形态的激光的移动路径变更为水平方向以将照射区域扩张成面形态的旋转多面镜,所述摆动镜的摆动速度快于所述旋转多面镜的旋转速度。
其中,特征可以是所述摆动镜的角度变成正弦波形状(Sinusoidal)。
其中,所述旋转多面镜包括用于反射从所述摆动镜照射的激光的N个反射面,所述摆动镜的任意时间点的预设角度可不同于所述旋转多面镜旋转360/N度后的时间点的所述摆动镜的预设角度。
其中,所述旋转多面镜包括用于反射从所述摆动镜照射的激光的多个反射面,所述旋转多面镜的多个反射面可以以所述旋转多面镜的旋转轴为基准具有不同的角度。
其中,特征可以是所述摆动镜的摆动角度最大的情况下,所述激光输出部不输出激光。
1.激光雷达装置及术语整理
激光雷达装置是用于利用激光探测对象体的距离及位置的装置。例如激光雷达装置与对象体之间的距离及以激光雷达装置为基准的对象体的位置可用(R,θ,
并且,激光雷达装置为了确定与对象体之间的距离R,可利用从对象体反射的激光。
根据一个实施例,激光雷达装置为了确定与对象体之间的距离R而可利用作为射出的激光与感测到的激光的时间差的飞行时间(TOF:Time Of Flight)。例如,激光雷达装置可包括输出激光的激光输出部与感测反射的激光的传感器部。激光雷达装置可确认激光输出部输出激光的时间,确认从对象体反射的激光被传感器部感测到的时间,根据射出的时间与感测到的时间之差判断与对象体之间的距离。
并且根据一个实施例,激光雷达装置为了确定与对象体之间的距离R而可根据感测到的激光的感测位置利用三角测量法。例如,从激光输出部射出的激光从相对近的对象体反射的情况下,反射的所述激光可在传感器部中离激光输出部相对远的位置感测到。并且,从激光输出部射出的激光从相对远的对象体反射的情况下,反射的所述激光可在传感器部中离激光输出部相对近的位置感测到。从而激光雷达装置能够根据激光的感测位置的差异判断与对象体之间的距离。
并且根据一个实施例,激光雷达装置为了确定与对象体之间的距离R而可利用感测到的激光的相位变化(Phase shift)。例如激光雷达装置可对从激光输出部射出的激光进行振幅调制(Amplitude Modulation,AM)感测关于振幅的相位,感测关于从位于扫描区域上的对象体反射的激光的振幅的相位,根据射出的激光与感测到的激光的相位差判断与位于扫描区域上的对象体之间的距离。
并且根据一个实施例,激光雷达装置可利用照射的激光的角度确定对象体的位置。例如,当能够知道从激光雷达装置向激光雷达装置的扫描区域照射的一个激光的照射角度(θ,
并且,根据一个实施例,激光雷达装置能够利用受光的激光的角度确定对象体的位置。例如,第一对象体与第二对象体离激光雷达装置的距离R相同,但以激光雷达装置为基准位于不同的位置(θ,
并且根据一个实施例,激光雷达装置为了探测周边的任意对象体的位置而可具有包括对象体的扫描区域。其中,扫描区域是用一个画面表示的可探测区域,可表示1帧期间形成一个画面的点、线、面的集合。并且扫描区域可表示从激光雷达装置照射的激光的照射区域,照射区域可表示1帧期间照射的激光与位于相同距离R的球面相遇的点、线、面的集合。并且视角(FOV,Field of view)表示可探测的区域(Field),可定义为将激光雷达装置视为原点的情况下扫描区域具有的角度范围。
2.激光雷达装置的构成
以下对一个实施例的激光雷达装置的各构成要素进行详细说明。
2.1激光雷达装置的构成要素
图1为示出一个实施例的激光雷达装置的示意图。
参见图1,一个实施例的激光雷达装置100可包括激光输出部110、扫描部120、传感器部130及控制部140。但不限于上述构成,所述激光雷达装置100可以是具有比所述构成更多或更少的构成的装置。例如,所述激光雷达装置可以不具备所述扫描部,仅由所述激光输出部、所述传感器部及所述控制部构成。
并且,可构成为包含于激光雷达装置100的激光输出部110、扫描部120、传感器部130及控制部140分别具有多个。例如,所述激光雷达装置可以由多个激光输出部、多个扫描部,多个传感器部构成。当然,也可以由一个激光输出部、多个扫描部、一个传感器部构成。
包含于激光雷达装置100的激光输出部110、扫描部120、传感器部130及控制部140可各自包括多个下位构成要素。例如,所述激光雷达装置的多个激光输出元件可作为一个阵列构成激光输出部。
2.1.1激光输出部
所述激光输出部110能够射出激光。所述激光雷达装置100可利用射出的所述激光检测与对象体之间的距离。
并且,所述激光输出部110可包括一个以上的激光输出元件。在一个实施例中,所述激光输出部110可包括一个激光输出元件,可包括多个激光输出元件。并且包括多个激光输出元件的情况下所述多个激光输出元件可构成一个阵列。
并且,所述激光输出部110能够射出905nm带域的激光,可射出1550nm带域的激光。并且,所述激光输出部110能够射出从800nm到1000nm之间波长的激光等,射出的激光的波长也可以在多种范围,也可以在特定范围。
并且,所述激光输出部110的激光输出元件有多个的情况下,各激光输出元件可射出相同波长带域的激光,可射出不同的波长带域的激光。例如,包括两个激光输出元件的激光输出部的情况下,一个激光输出元件可射出905nm带域的激光,另一个激光输出元件可射出1550nm带域的激光。
并且,所述激光输出元件可包括激光二极管(Laser Diode:LD)、固体激光器(Solid-s tate laser)、大功率激光器(high power laser)、发光二极管(Lightentitling diode,LED)、垂直腔面发射激光器(Vertical cavity Surface emittingLaser:VCSEL)、外腔半导体激光器(External cavity diode laser,ECDL)等,但不限于此。
2.1.2扫描部
扫描部120能够变更所述激光输出部110射出的激光的照射方向及/或大小。例如,所述扫描部120能够通过变更射出的激光的移动方向以变更激光的照射方向,可发散射出的激光或改变相位以变更激光的大小或变更照射方向,或者也可以发散激光且变更激光的移动方向以变更激光的照射方向及大小。
并且,所述扫描部120能够通过变更从所述激光输出部110照射的激光的照射方向及/或大小扩张所述激光雷达装置100的扫描区域或变更扫描方向。
并且,所述扫描部120可包括为了变更射出的激光的移动方向而以固定的角度变更激光的移动方向的固定镜、在预设角度范围摆动(nodding)的同时持续变更激光的移动方向的摆动镜及以一个轴为基准旋转的同时持续变更激光的移动方向的旋转镜,但不限于此。
并且,所述扫描部120为了发散射出的激光而可包括透镜、三棱镜、流体透镜(Microfluidie lens)、液晶(Liquid Crystal)等,但不限于此。
并且,所述扫描部120为了改变射出的激光的相位并借此变更照射方向而可包括光学相控阵(Optical phased array,OPA)等,但不限于此。
并且,所述摆动镜用于持续变更射出的激光的移动方向以扩张或变更激光的照射区域,可在预设角度范围摆动。在此,摆动可以指以一个或多个轴为基准旋转的同时在一定角度范围内进行往复运动。并且,所述摆动镜可以是共振扫描仪(Resonance scanner),MEMs镜,音圈电机(Voice Coil Motor,VCM)等,但不限于此。
并且,所述旋转镜用于持续变更射出的激光的移动方向以扩张或变更激光的照射区域,可以以一个轴为基准旋转。并且,所述旋转镜可以是单面镜以轴为基准旋转,也可以是圆锥形镜以轴为基准旋转,也可以是多面镜以轴为基准旋转,但不限于此,可以是以轴为基准无角度范围限制地旋转的镜。
并且,所述扫描部120可以由一个扫描部构成,也可以由多个扫描部构成。并且,所述扫描部可包括一个或两个以上的光学要素,其构成不受限制。
2.1.3传感器部
传感器部130能够感测位于激光雷达装置100的扫描区域上的对象体反射的激光。
并且,所述传感器部130可包括一个以上的传感器元件。在一个实施例中,所述传感器部130可包括一个传感器元件,也可以包括由多个传感器元件构成的传感器阵列。例如,所述传感器部130可包括一个APD(Avalanche Photodiode),也可以包括由多个单光子雪崩二极管(Single-photon avalanche diode,SPAD)构成为阵列的硅光电倍增管(Silicon Photo Multipliers,SiPM)。并且可以将多个APD构成为单通道,可构成为多个通道。
并且传感器部有多个的情况下,多个传感器部可分别由不同的传感器构成。例如,有三个传感器部的情况下,一个传感器部可以由APD构成,另一个传感器部可以由SPA D构成,又一传感器部可以由SiPM构成。
并且有多个传感器部且激光输出部的波长有多个情况下,多个传感器部可分别构成为用于不同的波长的传感器。例如,激光输出部输出905nm带域的波长及1550nm带域的波长的激光,传感器部有两个的情况下,一个传感器部感测905nm带域的波长的激光,另一个传感器部可感测1550nm带域的波长。
并且,所述传感器元件可包括PN光敏二极管、光敏晶体管、PIN光敏二极管、APD、SPAD、SiPM、电荷耦合器件(Charge-Coupled Device,CCD)等,但不限于此。
2.1.4控制部
控制部140能够根据感测到的激光判断从所述激光雷达装置到位于扫描区域上的对象体的距离。并且,所述控制部140可控制所述激光输出部110、所述扫描部120、所述传感器部130等所述激光雷达装置的各构成要素的工作。
2.2扫描部
以下对所述扫描部120进行更详细的说明。
图2为用于说明一个实施例的激光雷达装置中扫描部的功能的示意图。
参见图2,所述扫描部120的功能可以随着从激光输出部110射出的激光的照射区域而异。
2.2.1从激光输出部射出的激光的照射区域为点形态的情况下
根据一个实施例,所述激光输出部110具有一个激光输出元件的情况下,从激光输出部射出的激光111的照射区域可以是点形态。在此,扫描部120能够变更所述激光111照射方向及大小,从而能够将所述激光雷达装置的扫描区域扩张成线形态或面形态。
并且,所述扫描部120能够通过持续变更具有点形态的照射区域的所述激光111的移动方向变更激光的照射方向,从而能够将激光雷达装置的扫描区域扩张成面形态。
并且,所述扫描部120能够使具有点形态的照射区域的所述激光111发散以变更所述激光的大小,从而能够将激光雷达装置的扫描区域扩张成线或面形态。
并且,所述扫描部120能够通过变更具有点形态的照射区域的所述激光111的相位变更激光的大小及照射方向,从而能够将激光雷达装置的扫描区域扩张成线或面形态。
并且,所述扫描部120可初次持续变更具有点形态的照射区域的所述激光111的移动方向,二次将所述激光的移动方向变更为不同于之前变更的移动方向的方向以变更所述激光的照射方向,从而能够将激光雷达装置100的扫描区域扩张成面形态。
并且,所述扫描部120可初次持续变更具有点形态的照射区域的所述激光111的移动方向,二次使所述激光发散以变更所述激光的照射方向及大小,从而能够将激光雷达装置的扫描区域扩张成面形态。
并且,所述扫描部120可初次发散具有点形态的照射区域的所述激光111,二次持续变更发散的所述激光的移动方向以变更所述激光的照射方向及大小,从而能够将激光雷达装置的扫描区域扩张成面形态。
2.2.2从激光输出部射出的激光的照射区域为线形态的情况下
根据另一实施例,所述激光输出部110由多个激光输出元件构成的情况下,从激光输出部射出的激光112照射区域可以是线形态。其中。扫描部120能够变更所述激光112的照射方向及大小,从而能够将所述激光雷达装置的扫描区域扩张成面形态。
在此,所述扫描部120能够通过持续变更具有线形态的照射区域的所述激光112的移动方向变更所述激光的照射方向,从而能够将激光雷达装置的扫描区域扩张成面形态。
并且,所述扫描部120能够通过发散具有线形态的照射区域的所述激光112变更所述激光的大小,从而能够将激光雷达装置的扫描区域扩张成面形态。
并且,所述扫描部120能够通过变更具有线形态的照射区域的所述激光112的相位变更所述激光的照射方向及大小,从而能够将所述激光雷达装置的扫描区域扩张成面形态。
根据另一实施例,所述激光输出部110包括排列成一列以构成阵列的激光输出元件的情况下,从激光输出部110射出的激光112的照射区域可以是线形态。其中扫描部120能够变更所述激光112的照射方向及大小,从而能够将所述激光雷达装置的扫描区域扩张成面形态。
在此,所述扫描部120能够通过持续变更具有线形态的照射区域的所述激光112的移动方向变更所述激光的照射方向,从而能够将激光雷达装置的扫描区域扩张成面形态。
并且,所述扫描部120能够通过发散具有线形态的照射区域的所述激光112变更所述激光的大小,从而能够将激光雷达装置的扫描区域扩张成面形态。
并且,所述扫描部120能够通过变更具有线形态的照射区域的所述激光112的相位变更所述激光的照射方向及大小,从而能够将所述激光雷达装置的扫描区域扩张成面形态。
2.2.3从激光输出部射出的激光的照射区域为面形态的情况下
根据另一实施例,所述激光输出部110由多个激光输出元件构成的情况下,从激光输出部110射出的激光113的照射区域可以是面形态。其中,扫描部120能够变更所述激光的照射方向及大小,从而能够扩张所述激光雷达装置的扫描区域或变更扫描方向。
在此,所述扫描部120能够通过持续变更具有面形态的照射区域的所述激光113的移动方向变更所述激光的照射方向,从而能够扩张激光雷达装置的扫描区域或变更扫描方向。
并且,所述扫描部120能够通过发散具有面形态的照射区域的所述激光113变更所述激光的大小,从而能够扩张激光雷达装置的扫描区域或变更扫描方向。
并且,所述扫描部120能够通过变更具有面形态的照射区域的所述激光113的相位变更所述激光的照射方向及大小,从而能够扩张所述激光雷达装置的扫描区域或变更扫描方向。
根据另一实施例,包括构成为面形态的阵列的激光输出元件的情况下,从激光输出部110射出的激光113的照射区域可以是面形态。其中,扫描部120能够变更所述激光的照射方向及大小,从而能够扩张所述激光雷达装置的扫描区域或变更扫描方向。
在此,所述扫描部120能够通过持续变更具有面形态的照射区域的所述激光113的移动方向变更所述激光的照射方向,从而能够扩张激光雷达装置的扫描区域或变更扫描方向。
并且,所述扫描部120能够通过发散具有面形态的照射区域的所述激光113变更所述激光的大小,从而能够扩张激光雷达装置的扫描区域或变更扫描方向。
并且,所述扫描部120能够通过变更具有面形态的照射区域的所述激光113的相位变更所述激光的照射方向及大小,从而能够扩张所述激光雷达装置的扫描区域或变更扫描方向。
以下对所述从激光输出部射出的激光的照射区域为点形态的激光雷达装置进行具体说明。
3.激光雷达装置的一个实施例
3.1激光雷达装置的构成
图3为示出另一实施例的激光雷达装置的框图。
参见图3,一个实施例的激光雷达装置可包括激光输出部110、第一扫描部121、第二扫描部126及传感器部130。
所述激光输出部110及所述传感器部130已在图1及图2进行了说明,因此以下省略对所述激光输出部110及所述传感器部130的详细说明。
在图1及图2中上述扫描部120可包括所述第一扫描部121及所述第二扫描部126。
所述第一扫描部121能够通过变更射出的所述激光的照射方向及/或大小将激光的照射区域扩张成线形态。例如,所述第一扫描部121能够通过持续变更射出的所述激光的移动方向将激光的照射区域扩张成线形态。并且,所述第一扫描部121能够将射出的所述激光发散成线形态以将所述激光的照射区域扩张成线形态。
并且,所述第二扫描部126能够通过变更从所述第一扫描部121照射的激光的照射方向及/或大小将激光的照射区域扩张成面形态。例如,所述第二扫描部126能够通过持续变更从所述第一扫描部121照射的激光的移动方向将所述激光的照射区域扩张成面形态。并且,所述第二扫描部126能够通过发散从所述第一扫描部照射的激光将所述激光的照射区域扩张成面形态,从而能够将激光雷达装置100的扫描区域150扩张成面形态。
3.2激光雷达装置的工作
参见图3,图3示出从所述激光雷达装置100射出的激光的光路径。具体来讲,所述激光输出部110能够射出激光。所述激光输出部110射出的激光到达所述第一扫描部121,所述第一扫描部121能够向所述第二扫描部126照射所述激光。并且。所述激光到达第二扫描部126,所述第二扫描部126能够向所述扫描区域150照射所述激光。并且照射到所述激光雷达装置100的扫描区域150的所述激光能够被位于扫描区域150上的对象体160反射并通过所述第二扫描部126向所述传感器部130照射。所述传感器部130能够感测通过所述第二扫描部126照射的所述激光。
3.2.1激光雷达装置的照射方法
激光雷达装置100可以是用于利用激光测定从激光雷达装置100到对象体160的距离的装置。因此激光雷达装置100需要向对象体160照射激光,从而激光雷达装置100可具有用于高效地测定与对象体之间的距离的照射方法。其中,照射方法可包括确定从激光输出部110射出的激光到达位于扫描区域150上的对象体160的照射路径,确定扫描区域150的方法。因此以下对所述激光雷达装置的照射路径及扫描区域150进行说明。
具体来讲,所述激光输出部110可向所述第一扫描部121射出激光,所述第一扫描部121能够将射出的激光照射到所述第二扫描部126,所述第二扫描部126能够将照射的激光照射到所述激光雷达装置100的扫描区域150。
更具体来讲,所述激光输出部110射出的激光的照射区域为点形态,射出的所述激光能够通过所述第一扫描部121向所述第二扫描部126照射。在此,所述第一扫描部121能够通过变更照射区域为点形态的所述激光的照射方向及/或大小将所述激光的照射区域扩张成线形态。即,所述第一扫描部121能够从所述激光输出部110获得照射区域为点形态的激光并向所述第二扫描部126照射照射区域为线形态的激光。
在此,所述第二扫描部126能够通过变更照射区域为线形态的所述激光的照射方向及/或大小将所述激光的照射区域扩张成面形态,从所述第一扫描部121照射的激光能够通过所述第二扫描部126照射到所述扫描区域。即,所述第二扫描部126能够从所述第一扫描部121获得照射区域为线形态的激光并将照射区域为面形态的激光照射到所述扫描区域150。并且,所述第二扫描部126能够通过照射照射区域为面形态的激光将所述激光雷达装置100的扫描区域150扩张成面形态。
3.2.2激光雷达装置的受光方法
激光雷达装置100需要感测从对象体反射的激光,从而激光雷达装置100可具有用于高效地测定与对象体之间的距离的受光方法。其中,受光方法可包括确定对象体反射的激光到达传感器部的受光路径,确定到达传感器部的激光的量的方法。因此以下对激光雷达装置100的受光路径及到底传感器部的光的量进行说明。
具体来讲,照射到所述激光雷达装置100的扫描区域150的激光可被位于所述激光雷达装置的扫描区域150上的对象体160反射。并且从所述对象体160反射的激光可朝向所述第二扫描部126,所述第二扫描部126能够获得从所述对象体160反射的激光并进行反射以向所述传感器部130照射。在此,从所述对象体160反射的激光的性质可随着所述对象体160的颜色、材质等或所述激光的入射角等改变。
并且,从所述对象体160反射的所述激光能够通过所述第二扫描部126向所述传感器部130照射。即,从所述对象体160反射的所述激光可仅通过所述第二扫描部126向所述传感器部照射,而并不通过所述第一扫描部121及所述第二扫描126部两者向所述传感器部130照射。并且,从所述对象体160反射的所述激光可仅通过所述第二扫描部126向所述传感器部130照射,而不通过所述第一扫描部121及所述第二扫描126两者向所述传感器部130照射。因此到达所述传感器部130激光的量可根据第二扫描部126确定。
并且,图3示出从所述对象体160反射的激光仅通过所述第二扫描部126向所述传感器部130照射,但不限于此,根据情况,从所述对象体160反射的激光也可经过所述第一扫描部121及所述第二扫描部126到达所述传感器部130。并且,从所述对象体160反射的激光也可以在不经过所述第一扫描部121及所述第二扫描部126的情况下到达所述传感器部130。
如上包括射出点形态的激光的激光输出部110、第一扫描部121及第二扫描部126的激光雷达装置能够利用第一扫描部121及第二扫描部126将扫描区域150扩张成面形态。因此,相比于通过激光雷达装置本身的机械性旋转将扫描区域扩张成面形态的激光雷达装置在耐久性及稳定性方面能够发挥更好的效果。并且,相比于利用激光的扩散将扫描区域扩张成面形态的激光雷达装置,能够测定更远距离。并且,控制所述第一扫描部121及所述第二扫描126的工作的情况下能够向期望的感兴趣区域(Region Of Interest)照射激光。
4.利用摆动镜(Nodding mirror)与旋转多面镜(Rotating polygon mirror)的激光雷达装置
从激光雷达装置100的激光输出部110射出的激光的照射区域为点形态的情况下,激光雷达装置100可包括第一扫描部121及第二扫描部126。其中,照射区域为点形态的射出的激光通过第一扫描部121及第二扫描部126扩张成激光的照射区域为面形态,从而激光雷达装置100的扫描区域150能够扩张成面形态。
并且,激光雷达装置100所需的视角(FOV)可根据其用途而异。例如,对用于三维地图(3D Mapping)的固定型激光雷达装置而言,可能需要向垂直、水平方向尽可能宽广的视角,对车辆上配置的激光雷达装置而言,可能相比于水平方向相对宽广的视角向垂直方向需要相对窄的视角。并且对无人机(Dron)上配置的激光雷达而言,可能需要向垂直、水平方向尽可能宽广的视角。因此垂直方向可能需要的视角与水平方向上可能需要的视角不同的情况下,能够通过在第一扫描部121向需要相对窄的视角的方向变更激光的移动方向且在第二扫描部126向需要相对宽的视角的方向变更激光的移动方向,减小激光雷达装置100的整体大小。
并且,激光雷达装置100是在向扫描区域150照射的激光被位于扫描区域150上的对象体160反射的情况下,通过感测反射的激光测定距离的装置。其中激光可根据位于扫描区域150上的对象体160的颜色、材质或向对象体160照射的激光的入射角等向四周散射。因此为了测定远距离处的对象体160的距离而可能需要减少激光的扩散,为此,第一扫描部121及第二扫描部126可以是不扩张激光的大小但持续变更移动方向以扩张激光的照射区域的构成。
并且,激光雷达装置100为了进行三维扫描,第一扫描部121及第二扫描部126能够向不同的方向变更激光的移动方向。例如,第一扫描部121向与地面垂直的方向持续变更激光的移动方向,第二扫描部126能够向与地面平行的方向持续变更激光的移动方向。
并且,激光雷达装置100中的第一扫描部121从激光输出部110获得照射区域为点形态的激光,而第二扫描部126能够从第一扫描部121获得照射区域为线形态的激光。因此第二扫描部126的大小可大于第一扫描部121。并且,大小小的第一扫描部121的扫描速度能够比大小大的第二扫描部126更快。其中,扫描速度可表示持续变更激光的移动方向的速度。
并且,激光雷达装置100是向扫描区域150照射的激光被位于扫描区域150上的对象体160反射的情况下,通过感测反射的激光以测定距离的装置。其中,激光可随着位于扫描区域150上的对象体160的颜色、材质或向对象体160照射的激光的入射角等向四周发生散射。因此为了测定远距离处的对象体160的距离而可能需要增加能够被传感器部130感测到的激光的量,为此,从对象体160反射的激光可仅通过第一扫描部121及第二扫描部126中大小大的第二扫描部126向传感器部130照射。
因此,为了能够顺利地执行上述功能,激光雷达装置100的第一扫描部121可包括摆动镜,激光雷达装置100的第二扫描部126可包括旋转多面镜。
以下对第一扫描部121包括摆动镜且第二扫描部126包括旋转多面镜的激光雷达装置进行具体说明。
4.1激光雷达装置的构成
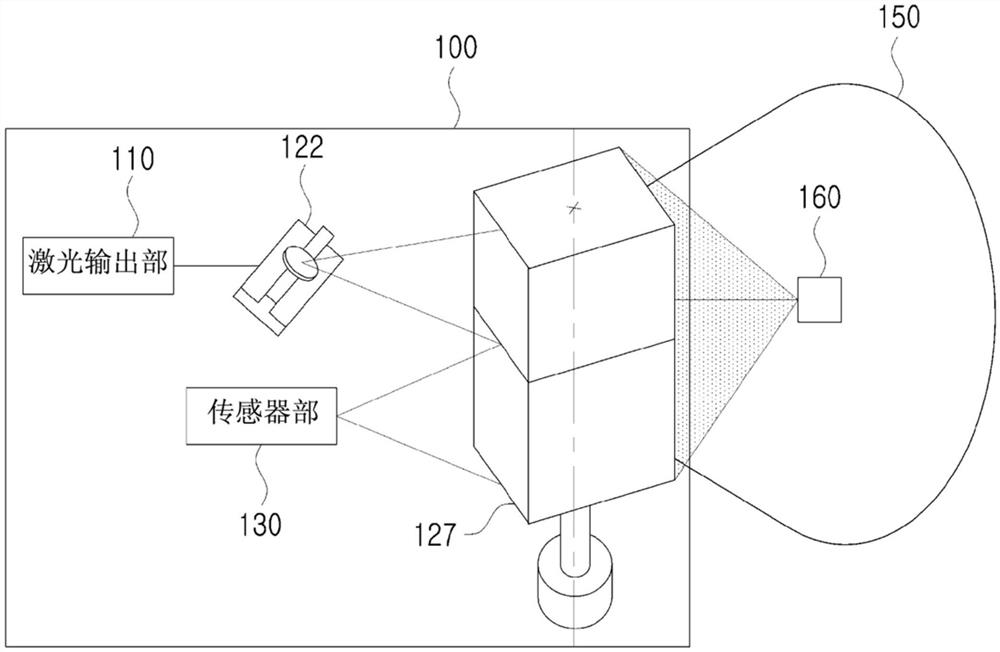
图4涉及一个实施例的激光雷达装置。
参见图4,一个实施例的激光雷达装置100可包括激光输出部110、摆动镜122、旋转多面镜127及传感器部130。
所述激光输出部110及所述传感器部130已在图1及图2进行了说明,因此以下省略对所述激光输出部110及所述传感器部130的详细说明。
图3中上述第一扫描部121可包括摆动镜122,第二扫描部126可包括旋转多面镜127。
所述摆动镜122可以是上述第一扫描器部121的一个实施例。所述摆动镜122能够以一个轴为基准在预设角度范围摆动,也能够以两个轴为基准在预设角度范围摆动。在此,所述摆动镜122以一个轴为基准在预设角度范围摆动的情况下,从所述摆动镜照射的激光的照射区域可以是线形态。并且,所述摆动镜122以两个轴为基准在预设角度范围摆动的情况下,从所述摆动镜照射的激光的照射区域可以是面形态。
并且,所述摆动镜122的摆动速度可在预设角度全范围相同,也可以在预设角度全范围不同。例如,所述摆动镜122能够在预设角度全范围以相同的角速度摆动。并且例如,所述摆动镜122能够在预设角度的两端以相对慢、在预设角度的中央部分相对快的角速度摆动。
并且,所述摆动镜122获得所述激光输出部110射出的激光并反射,能够随着在预设角度范围摆动持续变更所述激光的移动方向。所述激光的照射区域从而能够扩张成线或面形态。
并且,所述旋转多面镜127可以是上述所述第二扫描仪126的一个实施例。所述旋转多面镜127能够以一个轴为基准旋转。其中,所述旋转多面镜127获得从所述摆动镜122照射的激光并反射,能够随着以一个轴为基准旋转持续变更所述激光的移动方向。并且,从而能够将所述激光的照射区域扩张成面形态,其结果,能够将所述激光雷达装置100的扫描区域310扩张成面形态。
并且,所述旋转多面镜127的旋转速度可在旋转的角度全范围相同,也可以在旋转的角度范围互异。例如,从所述旋转多面镜127照射的激光的方向朝向扫描区域310的中心部分时的旋转速度可比从所述旋转多面镜127照射的激光的方向朝向扫描区域310的侧方部分时的旋转速度相对更慢。并且旋转速度可随所述旋转多面镜127的旋转次数而异。
并且将所述激光雷达装置100的垂直视角设置成比水平视角窄的情况下,所述摆动镜122能够通过将所述激光输出部110射出的激光的移动方向持续变更为相对于地面垂直的方向,以此将激光的照射区域扩张成相对于地面垂直的方向的线形态。并且,在此,所述旋转多面镜127能够将从所述摆动镜122照射的激光的移动方向持续变更为相对于地面水平的方向,以此将激光的照射区域扩张成面形态,从而能够将所述激光雷达装置100的扫描区域310扩张成面形态。因此,所述摆动镜122向垂直方向扩张扫描区域310,所述旋转多面镜127能够向水平方向扩张扫描区域310。
并且,所述摆动镜122反射所述激光输出部110射出的激光,因此,所述摆动镜122的大小可与所述激光的直径相近。而从所述摆动镜122照射的激光的照射区域为线形态,因此为了反射从所述摆动镜122照射的激光,所述旋转多面镜127的大小可以是所述照射区域的大小以上的大小。因此,所述摆动镜122的大小可小于所述旋转多面镜127的大小,所述摆动镜122的摆动速度可以快于所述旋转多面镜127的旋转速度。
以下对具有上述构成的所述激光雷达装置100的激光照射方法及激光受光方法进行说明。
4.2激光雷达装置的工作
再次参见图4,能够知道从所述激光雷达装置100的所述激光开始射出到被感测为止的激光的移动路径。具体来讲,所述激光雷达装置100的所述激光输出部110射出的激光通过所述摆动镜122向所述旋转多面镜127照射,向所述旋转多面镜127照射的所述激光能够通过所述旋转多面镜127向所述激光雷达装置100的扫描区域150照射。并且照射到所述激光雷达装置100的扫描区域150的所述激光能够被位于扫描区域150上的对象体160反射并通过所述旋转多面镜127向所述传感器部130照射。并且,所述传感器部130能够感测通过所述旋转多面镜127照射的所述激光。
4.2.1激光雷达装置的照射方法
激光雷达装置100可以是用于利用激光测定从激光雷达装置100到对象体160的距离的装置。因此激光雷达装置100需要向对象体160照射激光,从而激光雷达装置100可具有用于高效地测定与对象体160之间的距离的照射方法。其中,照射方法可包括用于确定从激光输出部110射出的激光到达位于扫描区域150上的对象体160的照射路径,确定扫描区域150的方法。因此以下对所述激光雷达装置100的照射路径及扫描区域150进行说明。
具体来讲,所述激光输出部110能够向所述摆动镜122射出激光,所述摆动镜122能够获得射出的激光并反射使得向所述旋转多面镜127照射,所述旋转多面镜127能够获得照射的激光并反射使得向所述激光雷达装置100的扫描区域150照射。
在此,所述激光输出部110能够向所述摆动镜122射出激光,在此,射出的所述激光的照射区域可以是点形态。
其中,所述激光输出部110射出的激光能够通过所述摆动镜122向所述旋转多面镜127照射。在此,所述摆动镜122能够通过变更照射区域为点形态的所述激光的照射方向将所述激光的照射区域扩张成线形态。即,所述摆动镜122能够从所述激光输出部110获得照射区域为点形态的激光并将照射区域为线形态的激光向所述旋转多面镜127照射。
在此,所述摆动镜122能够通过向相对于地面垂直的方向持续变更所述激光输出部110射出的激光的移动方向,以此将激光的照射区域扩张成相对于地面垂直的方向的线形态。
并且,从所述摆动镜122照射的激光能够通过所述旋转多面镜127向所述扫描区域150照射。在此,所述旋转多面镜127能够变更照射区域为线形态的所述激光的照射方向,以将所述激光的照射区域扩张成面形态。即,所述旋转多面镜127能够从所述摆动镜122获得照射区域为线形态的激光并将照射区域为面形态的激光照射到所述扫描区域150。并且,所述旋转多面镜127能够通过照射照射区域为面形态的激光将所述激光雷达装置100的扫描区域150扩张成面形态。
并且,所述旋转多面镜127能够通过向相对于地面水平的方向持续变更从所述摆动镜122照射的激光的移动方向将激光的照射区域扩张成面形态。
并且该情况下,可根据所述摆动镜122的预设角度及所述旋转多面镜127的反射面数量确定所述激光雷达装置100的扫描区域150,从而能够确定所述激光雷达装置100的视角。例如,所述摆动镜122向相对于地面垂直的方向持续变更激光的移动方向的情况下,所述激光雷达装置100的垂直视角可根据所述摆动镜122的预设角度确定。并且,所述旋转多面镜127向相对于地面水平的方向持续变更激光的移动方向的情况下,所述激光雷达装置100的水平视角可根据所述旋转多面镜127的反射面的数量确定。
4.2.2激光雷达装置的受光方法
激光雷达装置100可以是用于利用激光测定从激光雷达装置100到对象体160的距离的装置。因此需要感测从对象体160反射的激光,从而激光雷达装置100可具有用于高效地测定与对象体160之间的距离的受光方法。其中,受光方法可包括用于确定被对象体160反射的激光到达传感器部130的受光路径,确定到达传感器部130的激光的量的方法。因此以下对所述激光雷达装置100的受光路径及到达传感器部130的激光的量进行说明。
具体来讲,向所述激光雷达装置100的扫描区域150照射的激光可从位于所述激光雷达装置100的扫描区域150上的对象体160反射。并且从所述对象体160反射的激光可朝向所述旋转多面镜127,所述旋转多面镜127能够获得从所述对象体160反射的激光并反射使得向所述传感器部130照射。在此,从所述对象体160反射的激光的性质可随所述对象体160的颜色、材质等或所述激光的入射角等改变。
并且从所述对象体160反射的所述激光能够通过所述旋转多面镜127向所述传感器部130照射。即,从所述对象体160反射的所述激光能够通过所述旋转多面镜127向所述传感器部130照射,而并不通过所述摆动镜122及所述旋转多面镜127两者向所述传感器部130照射。并且从所述对象体160反射的所述激光能够仅通过所述旋转多面镜127向所述传感器部130照射,而不通过所述摆动镜122及所述旋转多面镜127两者向所述传感器部130照射。因此到达所述传感器部130的激光的量可根据所述旋转多面镜127确定。
其中,使从所述对象体160反射的激光仅通过所述旋转多面镜127向所述传感器部130照射相比于通过所述摆动镜122及所述旋转多面镜127向所述传感器部130照射,能够增加到达所述传感器部130的激光的量,能够使得到达所述传感器部130的激光的量更均匀。
具体来讲,使从所述对象体160反射的激光仅通过所述旋转多面镜127向所述传感器部130照射的情况下,到达所述传感器部130的激光的量可根据所述旋转多面镜127的反射面的大小及所述旋转多面镜127的旋转角度确定。
相反,使从所述对象体160反射的激光通过所述摆动镜122及所述旋转多面镜127向所述传感器部130照射的情况下,到达所述传感器部130的激光的量可根据所述摆动镜122的大小、所述摆动镜122的摆动角度、所述旋转多面镜127的反射面的大小及所述旋转多面镜127的旋转角度确定。即,到达所述传感器部130的激光的量可根据所述摆动镜122的大小与所述旋转多面镜127的大小中具有更小的大小的构成确定,可随着所述摆动镜122的摆动角度及所述旋转多面镜127的旋转角度改变。因此相比于仅通过所述旋转多面镜127向所述传感器部130照射的情况,到达所述传感器部130的激光的量小,到达所述传感器部130的激光的量的变化更大。
5.旋转多面镜(Rotating Polygon mirror)
5.1结构
图5为用于示出一个实施例的旋转多面镜的示意图。
参见图5,一个实施例的旋转多面镜1100可包括反射面1120及主体1110,能够以垂直贯通所述主体1110的上部1112与下部1111的中心的旋转轴1130为中心旋转。但所述旋转多面镜1100可以由上述构成中仅一部分构成,可包括更多构成要素。例如,所述旋转多面镜1100可包括反射面1120及主体1110,所述主体1110可以仅由下部1111构成。在此,所述反射面1120可被所述主体1110的下部1111支撑。
所述反射面1120为用于反射获得的激光的面,可包括反射镜、可反射的塑料等,但不限于此。
并且,所述反射面1120也可以设于除所述主体1110的上部1111及下部1112以外的侧面,可设置成所述旋转轴1130与各所述反射面1120的法线垂直相交。这是为了使从各所述反射面1120照射的激光的扫描区域相同以反复扫描同一扫描区域。
并且,所述反射面1120可以仅设于除所述主体1110的上部1111及下部1112以外的侧面,可设置成各所述反射面1120的法线与所述旋转轴1130分别具有不同的角度。这是为了使从所述各反射面1120照射的激光的扫描区域不同以扩张激光雷达装置的扫描区域。
并且,所述反射面1120可以是长方形形态,但不限于此,可以是三角形、梯形等多种形态。
并且,所述主体1110用于支撑所述反射面1120,可包括上部1112、下部1111及连接上部1112与下部1111的柱1113。在此,所述柱1113可设置成连接所述主体1110的上部1112及下部1111的中心,也可设置成连接所述主体1110的上部1112及下部1111的各顶点,也可设置成连接所述主体1110的上部1112及下部1111的各棱角,但用于连接支撑所述主体1110的上部1112及下部1111的结构不受限制。
并且,所述主体1110为了获得用于旋转的驱动力而可结合于驱动部1140,也可以通过所述主体1110的下部1111结合于驱动部1140,也可以通过所述主体1110的上部1112结合于驱动部1140。
并且,所述主体1110的上部1112及下部1111可以是多角形形态。在此,所述主体1110的上部1112与所述主体1110的下部1111的形态可相同,但不限于此,所述主体1110的上部1112与所述主体1110的下部1111的形态也可互异。
并且,所述主体1110的上部1112及下部1111的大小可相同。但不限于此,所述主体1110的上部1112与所述主体1110的下部1111的大小可互异。
并且,所述主体1110的上部1112及/或下部1111可包括空气能够经过的空间。
图5说明的所述旋转多面镜1100为包括四个反射面1120的四角柱形态的六面体,但所述旋转多面镜1100的反射面1120不必是四个,不必是四角柱形态的六面体。
并且,为了探测所述旋转多面镜1100的旋转角度,激光雷达装置还可包括编码部。并且,激光雷达装置能够利用探测到的所述旋转角度控制所述旋转多面镜1100的工作。在此,所述编码部可包含于所述旋转多面镜1100,也可以配置成与所述旋转多面镜1100相隔。
5.2视角(FOV:Field Of View)
激光雷达装置100所需的视角(FOV)可根据其用途而异。例如,对用于三维地图(3DMapping)的固定型激光雷达装置而言,可能需要向垂直、水平方向尽可能宽广的视角,对车辆上配置的激光雷达装置而言,可能相比于水平方向相对宽广的视角,向垂直方向需要相对窄的视角。并且对无人机(Dron)上配置的激光雷达而言,可能需要向垂直、水平方向尽可能宽广的视角。
并且,激光雷达装置的扫描区域可根据旋转多面镜的反射面的数量确定,从而能够确定所述激光雷达装置的视角。因此可根据所需的激光雷达装置的视角确定旋转多面镜的反射面的数量。
5.2.1反射面的数量与视角
图6至图8为对反射面的数量与视角的关系进行说明的附图。
图6至图8对反射面为三个、四个、五个的情况进行说明,但所述反射面的数量并不是固定的,反射面的数量不同的情况下可类推以下说明轻易算出。并且图6至图8对主体的上部及下部为正多角形的情况进行说明,但主体的上部及下部不是正多角形的情况下也能够通过类推以下说明轻易算出。
图6为用于说明所述反射面的数量为三个且所述主体的上部及下部为正三角形态的旋转多面镜1200的视角的俯视图。
参见图6,激光1250可向与所述旋转多面镜1200的旋转轴1240一致的方向入射。其中,所述旋转多面镜1200的上部为正三角形形态,因此三个反射面构成的角度可分别为60度。并且参见图6,所述旋转多面镜1200向顺时针方向略微旋转配置的情况下,所述激光在附图上向上侧部分反射,所述旋转多面镜向逆时针方向略微旋转配置的情况下,所述激光在附图上能够向下侧部分反射。因此参见图6计算反射的激光的路径即可知道所述旋转多面镜的最大视角。
例如,通过所述旋转多面镜1200的1号反射面反射的情况下,反射的激光能够以与入射的所述激光1250构成120度的角度向上侧反射。并且所述旋转多面镜通过3号反射面反射的情况下,反射的激光可以与入射的所述激光构成120度的角度向下侧反射。
因此,所述旋转多面镜1200的所述反射面的数量为三个且所述主体的上部及下部为正三角形形态的情况下,所述旋转多面镜的最大视角可以是240度。
图7为用于说明所述反射面的数量为四个且所述主体的上部及下部为正方形形态的旋转多面镜的视角的俯视图。
参见图7,激光1350可向与所述旋转多面镜1300的旋转轴1340一致的方向入射。其中,所述旋转多面镜1300的上部为正方形形态,因此四个反射面构成的角度可分别为90度。并且参见图7,所述旋转多面镜1300向顺时针方向略微旋转配置的情况下,所述激光在附图上向上侧部分反射,所述旋转多面镜1300向逆时针方向略微旋转配置的情况下,所述激光在附图上能够向下侧部分反射。因此参见图7计算反射的激光的路径即可知道所述旋转多面镜1300的最大视角。
例如,通过所述旋转多面镜1300的1号反射面反射的情况下,反射的激光能够以与入射的所述激光1350构成90度的角度向上侧反射。并且通过所述旋转多面镜1300的4号反射面反射的情况下,反射的激光能够以与入射的所述激光1350构成90度的角度向下侧反射。
因此,所述旋转多面镜1300的所述反射面的数量为四个且所述主体的上部及下部为正方形形态的情况下,所述旋转多面镜1300的最大视角可以是180度。
图8为用于说明所述反射面的数量为五个且所述主体的上部及下部为正五角形形态的旋转多面镜的视角的俯视图。
参见图8,激光1450可向与所述旋转多面镜1400的旋转轴1440一致的方向入射。其中,所述旋转多面镜1400的上部为正五角形形态,因此五个反射面构成的角度可分别为108度。并且参见图8,所述旋转多面镜1400向顺时针方向略微旋转配置的情况下,所述激光在附图上向上侧部分反射,所述旋转多面镜1400向逆时针方向略微旋转配置的情况下,所述激光在附图上能够向下侧部分反射。因此参见图8计算反射的激光的路径即可知道所述旋转多面镜的最大视角。
例如,通过所述旋转多面镜1400的1号反射面反射的情况下,反射的激光能够以与入射的所述激光145构成72度的角度向上侧反射。并且通过所述旋转多面镜1400的5号反射面反射的情况下,反射的激光能够以与入射的所述激光1450构成72度的角度向下侧反射。
因此,所述旋转多面镜1400的所述反射面的数量为五个且所述主体的上部及下部为正五角形形态的情况下,所述旋转多面镜的最大视角可以是144度。
其结果,参见上述图6至图8,所述旋转多面镜的反射面的数量为N个且所述主体的上部及下部为N角形的情况下,设所述N角形的内角为θ时,所述旋转多面镜的最大视角可成为360度-2θ。
但上述的所述旋转多面镜的视角只是算出的最大值,因此通过激光雷达装置中所述旋转多面镜确定的视角可小于算出的所述最大值。并且,在此,激光雷达装置在扫描时可以只利用所述旋转多面镜的各反射面中的一部分。
5.3照射部分及受光部分
激光雷达装置的扫描部包括旋转多面镜的情况下,旋转多面镜可用于使得从激光输出部射出的激光向激光雷达装置的扫描区域照射,可用于从位于扫描区域上的对象体反射的激光受光到传感器部。
其中,将用于向激光雷达装置的扫描区域照射射出的激光的旋转多面镜的各反射面的一部分称为照射部分。并且将用于将从位于扫描区域上的对象体反射的激光受光到传感器部的旋转多面镜的各反射面的一部分称为受光部分。
5.3.1具有照射部分及受光部分的旋转多面镜
5.3.1.1包括旋转多面镜的激光雷达装置的旋转多面镜
图9为用于说明一个实施例的旋转多面镜的照射部分及受光部分的示意图。
参见图9,从激光输出部110射出的激光可具有点形态的照射区域,可入射到旋转多面镜1500的反射面。虽然图9并未示出,但所述激光输出部110射出的激光可具有线或面形态的照射区域。
所述激光输出部110射出的激光具有点形态的照射区域的情况下,所述旋转多面镜1500上的照射部分1551可成为向所述旋转多面镜的旋转方向连接射出的所述激光与所述旋转多面镜相遇的点的线形态。因此该情况下,所述旋转多面镜1500的照射部分1551可以以与所述旋转多面镜1500的旋转轴1510垂直的方向的线形态位于各反射面。
并且从所述旋转多面镜1500的照射部分1551照射从而照射到激光雷达装置100的扫描区域150的激光可从位于所述扫描区域150上的对象体160反射,从所述对象体160反射的激光1530可在比照射的激光1520更大的范围反射。因此从所述对象体160反射的激光1530与照射的激光平行,能够以更宽广的范围受光于激光雷达装置100。
在此,从所述对象体160反射的激光1530可以比所述旋转多面镜1500的反射面的大小更大地传递。然而所述旋转多面镜1500的受光部分1561为用于使从所述对象体160反射的激光1530受光于传感器部130的部分,可以是比所述旋转多面镜1500的反射面的大小小的所述反射面的一部分。例如,如图9所示,从所述对象体160反射的激光1530通过所述旋转多面镜1500向传感器部130传递的情况下,所述旋转多面镜1500的反射面中反射使得向所述传感器部130传递的部分可成为受光部分1561。因此,所述旋转多面镜1500的受光部分1561可以是向所述旋转多面镜1500的旋转方向延伸所述反射面中反射使得向所述传感器部130传递的一部分的部分。
并且,所述旋转多面镜1500与所述传感器部130之间还包括聚光透镜的情况下,所述旋转多面镜1500的受光部分1561可以是向所述旋转多面镜1500的旋转方向延伸所述反射面中反射使得向所述聚光透镜传递的一部分的部分。
虽然图9看似说明所述旋转多面镜1500的照射部分1551与受光部分1561相隔,但所述旋转多面镜1550的照射部分1551与受光部分1561可部分重叠,所述照射部分1551也可以包含于所述受光部分1561的内部。
5.3.1.2包括第一扫描部及旋转多面镜的激光雷达装置的旋转多面镜
图10为用于说明另一实施例的旋转多面镜的照射部分及受光部分的示意图。
参见图10,从第一扫描部121照射的激光可具有线形态的照射区域,可入射到旋转多面镜1500的反射面。虽然图10并未示出,但从所述第一扫描部121照射的激光也可以具有面形态的照射区域。
从所述第一扫描部121照射的激光具有线形态的照射区域的情况下,所述旋转多面镜1500上的照射部分1552可成为向所述旋转多面镜1500的旋转方向连接照射的所述激光的照射区域与所述旋转多面镜1500相遇的线形态的点集的面形态。因此该情况下,所述旋转多面镜1500的照射部分1552能够以具有与所述旋转多面镜的旋转轴1510垂直的法线的面形态位于各反射面。
并且从所述旋转多面镜1500的照射部分1552照射从而照射到激光雷达装置100的扫描区域150的激光可从位于所述扫描区域150上的对象体160反射,从所述对象体160反射的激光1530可在比照射的激光更大的范围反射。因此从所述对象体160反射的激光1530平行于照射的激光1520,能够以更宽广的范围受光于激光雷达装置100。
在此,从所述对象体160反射的激光1530可以比所述旋转多面镜1500的反射面的大小更大地传递。然而所述旋转多面镜1500的受光部分1562为用于使从所述对象体160反射的激光1530受光于传感器部130的部分,可以是比所述旋转多面镜1500的反射面的大小小的所述反射面的一部分。例如,如图10所示,从所述对象体160反射的激光1530通过所述旋转多面镜1500向传感器部130传递的情况下,所述旋转多面镜1500的反射面中反射使得向所述传感器部130传递的部分可成为受光部分1562。因此,所述旋转多面镜1500的受光部分1562可以是向所述旋转多面镜1500的旋转方向延伸所述反射面中反射使得向所述传感器部130传递的一部分的部分。
并且,所述旋转多面镜1500与所述传感器部130之间还包括聚光透镜的情况下,所述旋转多面镜1500的受光部分1562可以是向所述旋转多面镜1500的旋转方向延伸所述反射面中反射使得向所述聚光透镜传递的一部分的部分。
图10的说明看似所述旋转多面镜1500的照射部分1552与受光部分1562相隔,但所述旋转多面镜1500的照射部分1552与受光部分1562可部分重叠,所述照射部分1552也可以位于所述受光部分1562的内部。
5.3.1.3包括摆动镜及旋转多面镜的激光雷达装置的旋转多面镜
图11为用于说明又一个实施例的旋转多面镜的照射部分及受光部分的示意图。
参见图11,从摆动镜122照射的激光可具有线形态的照射区域,可入射到旋转多面镜1500的反射面。虽然图11并未示出,但从所述摆动镜122照射的激光也可具有面形态的照射区域。
从所述摆动镜122照射的激光具有线形态的照射区域的情况下,所述旋转多面镜1500上的照射部分1553可成为向所述旋转多面镜1500的旋转方向连接照射的所述激光的照射区域与所述旋转多面镜1500相遇的线的面形态。因此,该情况下所述旋转多面镜1500的照射部分1553能够以具有与所述旋转多面镜1500的旋转轴1510垂直的方向的法线的面形态配置于各反射面。
并且从所述旋转多面镜1500的照射部分1563照射以照射到激光雷达装置100的扫描区域150的激光可从位于所述扫描区域150上的对象体160反射,从所述对象体160反射的激光1530可在比照射的激光1520更大的范围反射。因此从所述对象体160反射的激光1530能够与照射的激光1520平行以更宽广的范围受光于激光雷达装置。
在此,从所述对象体160反射的激光1530可以比所述旋转多面镜1500的反射面的大小更大地传递。然而所述旋转多面镜1500的受光部分1563为用于使从所述对象体160反射的激光1530受光到传感器部130的部分,可以是比所述旋转多面镜1500的反射面的大小小的所述反射面的一部分。例如,如图11所示,从所述对象体160反射的激光1530通过所述旋转多面镜1500向传感器部130传递的情况下,所述旋转多面镜1500的反射面中反射使得向中所述传感器部130传递的部分可成为受光部分1563。因此,所述旋转多面镜1500的受光部分1563可以是向所述旋转多面镜1500的旋转方向延伸所述反射面中反射使得向所述传感器部130传递的一部分的部分。
并且,所述旋转多面镜1500与所述传感器部130之间还包括聚光透镜的情况下,所述旋转多面镜1500的受光部分1563可以是向所述旋转多面镜1500的旋转方向延伸所述反射面中反射使得向所述聚光透镜传递的一部分的部分。
图11的说明看似所述旋转多面镜1500的照射部分1553与受光部分1563相隔,但所述旋转多面镜1500的照射部分1553与受光部分1563可部分重叠,所述照射部分1553也可以包含于所述受光部分1563的内部。
5.3.2.包括具有照射部分及受光部分的旋转多面镜的激光雷达装置的照射路径及受光路径
将激光雷达装置的激光输出部射出的激光到达位于扫描区域上的对象体的路径称为照射路径,将对象体反射的激光到达传感器部的路径称为受光路径。
以下对包括具有照射部分及受光部分的旋转多面镜的激光雷达装置的照射路径及受光路径进行说明。
5.3.2.1包括旋转多面镜的激光雷达装置
再次参见图9,一个实施例的激光雷达装置100可包括激光输出部110、旋转多面镜1500、传感器部130。
其中,所述激光雷达装置100的所述激光输出部110射出的激光能够通过所述旋转多面镜1500向所述激光雷达装置100的扫描区域150照射。
具体来讲,所述激光输出部110能够向所述旋转多面镜1500射出激光,所述旋转多面镜1500能够获得射出的激光并反射使得向所述激光雷达装置100的扫描区域150照射。在此,射出的所述激光的照射区域可以是点形态。
在此,所述旋转多面镜1500的照射部分1551可以是向所述旋转多面镜1500的旋转方向连接射出的所述激光与所述旋转多面镜1500相遇的点的线形态。因此该情况下,所述旋转多面镜1500的照射部分1551能够以与所述旋转多面镜1500的旋转轴1510垂直的方向的线形态位于各反射面。
并且,所述激光雷达装置100的照射路径可以是从所述激光输出部110起通过所述旋转多面镜1500的照射部分1551连接至扫描区域150的路径。因此,所述旋转多面镜1500的照射部分1551可包含于所述激光雷达装置100的照射路径。
并且,照射到所述激光雷达装置100的扫描区域150的激光能够从位于扫描区域150上的对象体160反射并通过所述旋转多面镜1500向传感器部130传递。
具体来讲,照射到所述激光雷达装置100的扫描区域150的激光能够从位于所述激光雷达装置100的扫描区域150上的对象体160反射。并且从所述对象体160反射的激光能够朝向所述旋转多面镜1500,所述旋转多面镜1500能够获得从所述对象体160反射的激光1530并反射使得向所述传感器部130照射。
在此,所述旋转多面镜1500的受光部分1561是用于使得从所述对象体160反射的激光1530受光于所述传感器部130的部分,可以是比所述旋转多面镜1500的反射面的大小小的所述反射面的一部分。因此该情况下,所述旋转多面镜1500的受光部分1561可以是向所述旋转多面镜1500的旋转方向延伸所述反射面中反射使得向所述传感器部130传递的一部分的部分。
并且,所述激光雷达装置100的受光路径可以是从所述对象体160起通过所述旋转多面镜1500的受光部分1561连接至传感器部130的路径。因此,所述旋转多面镜1500的受光部分1561可包含于所述激光雷达装置100的受光路径。
并且从所述对象体160反射的所述激光1530能够通过所述旋转多面镜1500向所述传感器部130照射。即,从所述对象体160反射的所述激光1530能够通过所述旋转多面镜1500向所述传感器部130照射,所述旋转多面镜1500与所述传感器部130之间还可包括聚光透镜等其他光学装置。
5.3.2.2包括第一扫描部及旋转多面镜的激光雷达装置
再次参见图10,一个实施例的激光雷达装置可包括激光输出部110、第一扫描部121、旋转多面镜1500及传感器部130。
其中,所述激光雷达装置100的所述激光输出部110射出的激光能够通过所述第一扫描部121及所述旋转多面镜1500向所述激光雷达装置100的扫描区域150照射。
具体来讲,所述激光输出部110能够向所述第一扫描部121射出激光,所述第一扫描部121能够获得射出的激光并反射使得向所述旋转多面镜1500照射,所述旋转多面镜1500能够获得照射的激光并反射使得向所述激光雷达装置100的扫描区域150照射。在此,射出的所述激光的照射区域可以是点形态,从所述第一扫描部121照射的激光的照射区域可以是线或面形态。
从所述第一扫描部121照射的激光具有线形态的照射区域的情况下,所述旋转多面镜1500的照射部分1552可以是向所述旋转多面镜1500的旋转方向连接照射的所述激光的照射区域与所述旋转多面镜1500相遇的线的面形态。因此该情况下,所述旋转多面镜1500的照射部分1552能够以具有与所述旋转多面镜1500的旋转轴1510垂直的方向的法线的面形态位于各反射面。
并且,所述激光雷达装置100的照射路径可以是从所述激光输出部110起通过所述第一扫描部121朝向所述旋转多面镜1500的照射部分,通过所述旋转多面镜1500的照射部分1552连接至扫描区域150的路径。因此,所述旋转多面镜1500的照射部分1552可包含于所述激光雷达装置100的照射路径。
并且,照射到所述激光雷达装置100的扫描区域150的激光可从位于扫描区域150上的对象体160反射并通过所述旋转多面镜1500向传感器部130传递。
具体来讲,照射到所述激光雷达装置100的扫描区域150的激光可从位于所述激光雷达装置100的扫描区域150上的对象体160反射。并且,从所述对象体160反射的激光1530可朝向所述旋转多面镜1500,所述旋转多面镜1500能够获得从所述对象体160反射的激光1530并反射使得向所述传感器部130照射。
在此,所述旋转多面镜1500的受光部分1562是用于使得从所述对象体160反射的激光1530受光于所述传感器部130的部分,可以是比所述旋转多面镜1500的反射面的大小小的所述反射面的一部分。因此该情况下,所述旋转多面镜1500的受光部分1562可以是向所述旋转多面镜1500的旋转方向延伸所述反射面中反射使得向所述传感器部130传递的一部分的部分。
并且,所述激光雷达装置100的受光路径可以是从所述对象体160起通过所述旋转多面镜1500的受光部分1562连接至传感器部130的路径。因此,所述旋转多面镜1500的受光部分1562可包含于所述激光雷达装置100的受光路径。
并且从所述对象体160反射的所述激光能够通过所述旋转多面镜1500向所述传感器部130照射。即,从所述对象体160反射的所述激光1530能够通过所述旋转多面镜1500向所述传感器部130照射,所述旋转多面镜1500与所述传感器部130之间可包括聚光透镜等其他光学装置。
5.3.2.3包括摆动镜及旋转多面镜的激光雷达装置
再次参见图11,一个实施例的激光雷达装置100可包括激光输出部110、摆动镜122、旋转多面镜1500及传感器部130。
其中,所述激光雷达装置100的所述激光输出部110射出的激光可通过所述摆动镜122及所述旋转多面镜1500向所述激光雷达装置100的扫描区域150照射。
具体来讲,所述激光输出部110能够向所述摆动镜122射出激光,所述摆动镜122能够获得射出的激光并反射使得向所述旋转多面镜1500照射,所述旋转多面镜1500能够获得照射的激光并反射使得向所述激光雷达装置100的扫描区域150照射。在此,射出的所述激光的照射区域可以是点形态,所述摆动镜照射的激光的照射区域可以是线或面形态。
从所述摆动镜122照射的激光具有线形态的照射区域的情况下,所述旋转多面镜1500的照射部分1553可以是向所述旋转多面镜1500的旋转方向连接照射的所述激光的照射区域与所述旋转多面镜1500相遇的线的面形态。因此该情况下,所述旋转多面镜1500的照射部分1553能够以具有与所述旋转多面镜1500的旋转轴垂直的方向的法线的面形态位于各反射面。
并且,所述激光雷达装置100的照射路径可以是从所述激光输出部110起通过所述摆动镜122向所述旋转多面镜1500的照射部分1553,通过所述旋转多面镜1500的照射部分1553连接至扫描区域150的路径。因此,所述旋转多面镜1500的照射部分1553可包含于所述激光雷达装置100的照射路径。
并且,照射到所述激光雷达装置100的扫描区域150的激光可从位于扫描区域150上的对象体160反射并通过所述旋转多面镜1500向传感器部130传递。
具体来讲,照射到所述激光雷达装置100的扫描区域150的激光可从位于所述激光雷达装置100的扫描区域150上的对象体160反射。并且,从所述对象体160反射的激光1530可朝向所述旋转多面镜1500,所述旋转多面镜1500可获得从所述对象体160反射的激光1530并反射使得向所述传感器部130照射。
在此,所述旋转多面镜1500的受光部分1563是用于使得从所述对象体160反射的激光1530受光于所述传感器部130的部分,可以是比所述旋转多面镜1500的反射面的大小小的所述反射面的一部分。因此该情况下,所述旋转多面镜1500的受光部分1563可以是向所述旋转多面镜的旋转方向延伸所述反射面中反射使得向所述传感器部130传递的一部分的部分。
并且,所述激光雷达装置100的受光路径可以是从所述对象体160起通过所述旋转多面镜1500的受光部分1563连接至传感器部130的路径。因此,所述旋转多面镜1500的受光部分1563可包含于所述激光雷达装置100的受光路径。
并且,从所述对象体160反射的所述激光1530能够通过所述旋转多面镜1500向所述传感器部130照射。即,从所述对象体160反射的所述激光1530能够通过所述旋转多面镜1500向所述传感器部130照射,所述旋转多面镜1500与所述传感器部130之间还可包括聚光透镜等其他光学装置。
5.3.3照射部分及受光部分的位置
5.3.3.1照射部分及受光部分分开
图12为用于说明一个实施例的旋转多面镜的照射部分及受光部分的位置关系的示意图。
参见图12,一个实施例的旋转多面镜1500的照射部分1571及受光部分1581可分开设置。
具体来讲,所述旋转多面镜1500包括反射面及主体,所述主体包括上部、下部及柱。并且,在此,所述旋转多面镜能够以贯通所述主体的上部及下部的中心的旋转轴1510为中心旋转。
其中,对所述旋转多面镜1500的各反射面而言,各反射面内可包括照射部分1571及受光部分1581,所述照射部分1571及所述受光部分1581能够以与所述旋转多面镜1500的旋转轴1510垂直的假想剖面1540为基准分开设置。
其中,与所述旋转轴1510垂直的假想剖面1540可根据所述照射部分1571及所述受光部分1581的大小位于所述旋转多面镜1500的内部。
其中,所述照射部分1571及所述受光部分1581中任意一个可以以与所述旋转轴1510垂直的剖面1540为基准设于上侧,此时,另一个可以以与所述旋转轴垂直的剖面为基准设于下侧。
如上所述,所述照射部分1571及所述受光部分1581分开的情况下,激光雷达装置的照射路径及受光路径在所述旋转多面镜相分离,因此与所述照射部分1571及所述受光部分1581重叠时相比,能够减少向扫描区域照射的激光引起的误差,与照射路径及受光路径分离时相比,能够增加从扫描区域上的对象体向传感器部传递激光的量。
5.3.3.2照射部分及受光部分相隔
图13为用于说明另一实施例的旋转多面镜的照射部分及受光部分的位置关系的示意图。
参见图13,一个实施例的旋转多面镜1500的照射部分1572及受光部分1582可相隔配置。
具体来讲,所述旋转多面镜1500包括反射面及主体,所述主体包括上部、下部及柱。并且,在此,所述旋转多面镜1500能够以贯通所述主体的上部及下部的中心的旋转轴1510为中心旋转。
其中,对所述旋转多面镜1500的各反射面而言,各反射面内可包括照射部分1572及受光部分1582,所述照射部分1572及所述受光部分1582可以以与所述旋转多面镜1500的旋转轴1510垂直的剖面为基准相隔配置。
其中,所述旋转轴与垂直的剖面可根据所述照射部分1572及所述受光部分1582的大小配置于所述旋转多面镜的内部。
其中,所述照射部分1572及所述受光部分1582中任意一个可以以与所述旋转轴垂直的剖面为基准配置于上侧,此时,另一个可以以与所述旋转轴垂直的剖面为基准配置于下侧,所述照射部分及所述受光部分可相隔配置。
如上所述,所述照射部分1572及所述受光部分1582分开的情况下,激光雷达装置的照射路径及受光路径在所述旋转多面镜1500上更分离,因此与所述照射部分1572及所述受光部分1582重叠时相比,能够减少向扫描区域照射的激光引起的误差,与照射路径及受光路径分离的情况相比,能够增加从扫描区域上的对象体向传感器部传递的激光的量。
5.3.4旋转多面镜的高度
激光雷达装置中使用的旋转多面镜具有照射部分及受光部分,所述照射部分及所述受光部分分开的情况下,所述旋转多面镜的高度可以是所述照射部分及所述受光部分的高度之和以上。
5.3.4.1包括旋转多面镜的激光雷达装置
图14为用于说明一个实施例的旋转多面镜的高度的示意图。
参见图14,一个实施例的包括旋转多面镜的激光雷达装置100可包括激光输出部110、旋转多面镜1600、传感器部130。
其中,所述激光输出部110射出的激光具有点形态的照射区域的情况下,所述旋转多面镜1600的照射部分1651可以是向所述旋转多面镜1600的旋转方向连接射出的所述激光与所述旋转多面镜1600相遇的点的线形态。因此,所述旋转多面镜1600的照射部分1651的高度可根据所述激光输出部110射出的激光的直径确定。
并且,从位于所述激光雷达装置100的扫描区域150上的对象体160反射的激光1630通过所述旋转多面镜1600向所述传感器部130传递的情况下,所述旋转多面镜1600的反射面中反射使得向所述传感器部130反射的部分可成为受光部分1661。并且可成为向所述旋转多面镜1600的旋转方向连接反射使得向所述传感器部130传递的部分的面形态。因此,所述旋转多面镜1600的受光部分1661的高度可根据所述传感器部130的大小确定。
其中,所述旋转多面镜1600的高度1640应为相加所述照射部分1651及所述受光部分1661的高度的高度以上,因此所述旋转多面镜1600的高度1640可根据所述激光输出部110射出的激光的直径及所述传感器部130的大小确定。
并且,所述激光雷达装置100还包括配置在所述旋转多面镜1600及所述传感器部130之间的聚光透镜的情况下,所述旋转多面镜1600的受光部分1661可以是向所述旋转多面镜1600的旋转方向延伸所述反射面中反射使得向所述聚光透镜传递的部分的部分。因此,所述旋转多面镜1600的受光部分1661可根据所述聚光透镜的直径确定。
其中,所述旋转多面镜1600的高度1640应为相加所述照射部分1651及所述受光部分1661的高度的高度以上,因此所述旋转多面镜1600的高度可根据所述激光输出部110射出的激光的直径及所述聚光透镜的直径确定。
5.3.4.2包括第一扫描部及旋转多面镜的激光雷达装置
图15为用于说明另一实施例的旋转多面镜的高度的示意图。
参见图15,一个实施例的包括旋转多面镜1700的激光雷达装置100可包括激光输出部110、第一扫描部121、旋转多面镜1700、传感器部130。
其中,从所述第一扫描部121照射的激光具有线形态的照射区域的情况下,所述旋转多面镜1700的照射部分1751可以是向所述旋转多面镜1700的旋转方向连接照射的所述激光的照射区域与所述旋转多面镜1700相遇的线形态的点集的面形态。因此,所述旋转多面镜1700的照射部分1751的高度可根据所述第一扫描部121与所述旋转多面镜1700之间的距离及所述第一扫描部121到所述照射区域的角度确定。
并且,从位于所述激光雷达装置100的扫描区域150上的对象体160反射的激光1730通过所述旋转多面镜1700向所述传感器部130传递的情况下,所述旋转多面镜1700的反射面中反射使得向所述传感器部130传递的部分可成为受光部分1761。并且可成为向所述旋转多面镜1700的旋转方向连接反射使得向所述传感器部130传递的部分的面形态。因此,所述旋转多面镜1700的受光部分1761的高度可根据所述传感器部130的大小确定。
其中,所述旋转多面镜1700的高度1740应为相加所述照射部分1751及所述受光部分1761的高度的高度以上,因此所述旋转多面镜1700的高度1740可根据所述第一扫描部121与所述旋转多面镜1700之间的距离、所述第一扫描部121到所述照射区域的角度及所述传感器部130的大小确定。
并且,所述激光雷达装置100还包括配置在所述旋转多面镜1700及所述传感器部130之间的聚光透镜的情况下,所述旋转多面镜1700的受光部分1761可以是向所述旋转多面镜1700的旋转方向延伸所述反射面中反射使得向所述聚光透镜传递的部分的部分。因此,所述旋转多面镜1700的受光部分1761的高度可根据所述聚光透镜的直径确定。
其中,所述旋转多面镜1700的高度1740应为相加所述照射部分1751及所述受光部分1761的高度的高度以上,因此所述旋转多面镜1700的高度1740可根据所述第一扫描部121与所述旋转多面镜1700之间的距离、所述第一扫描部121到所述照射区域的角度及所述聚光透镜的直径确定。
5.3.4.3包括摆动镜及旋转多面镜的激光雷达装置
图16为用于说明又一个实施例的旋转多面镜的高度的示意图。
参见图16,一个实施例的包括旋转多面镜1800的激光雷达装置100可包括激光输出部110、摆动镜122、旋转多面镜1800、传感器部130。
其中,从所述摆动镜122照射的激光具有线形态的照射区域的情况下,所述旋转多面镜1800的照射部分1851可以是向所述旋转多面镜1800的旋转方向连接照射的所述激光的照射区域与所述旋转多面镜1800相遇的线的面形态。因此,所述旋转多面镜1800的照射部分1851的高度可根据所述摆动镜122与所述旋转多面镜1800之间的距离及所述摆动镜122到所述照射区域的角度确定。在此,所述摆动镜122到所述照射区域的角度可根据所述摆动镜122的预设角度确定。
并且,从位于所述激光雷达装置100的扫描区域150上的对象体160反射的激光1830通过所述旋转多面镜1800向所述传感器部130传递的情况下,所述旋转多面镜1800的反射面中反射使得向所述传感器部130传递的部分可成为受光部分1861。并且可成为向所述旋转多面镜1800的旋转方向连接反射使得向所述传感器部130传递的部分的面形态。因此,所述旋转多面镜1800的受光部分1861的高度可根据所述传感器部130的大小确定。
其中,所述旋转多面镜1800的高度1840应为相加所述照射部分1851及所述受光部分1861的高度的高度以上,所述旋转多面镜1800的高度1840可根据所述摆动镜122与所述旋转多面镜之间1800的距离、所述摆动镜122到所述照射区域的角度及所述传感器部130的大小确定。在此,所述摆动镜122到所述照射区域的角度可根据所述摆动镜122的预设角度确定。
并且,所述激光雷达装置100还包括配置于所述旋转多面镜1800及所述传感器部130之间的聚光透镜的情况下,所述旋转多面镜1800的受光部分1861可以是向所述旋转多面镜1800的旋转方向延伸所述反射面中反射使得向所述聚光透镜传递的部分的部分。因此,所述旋转多面镜1800的受光部分1861的高度可根据所述聚光透镜的直径确定。
其中,所述旋转多面镜1800的高度1840应为相加所述照射部分1851及所述受光部分1861的高度的高度以上,因此所述旋转多面镜1800的高度1840可根据所述摆动镜122与所述旋转多面镜1800之间的距离、所述摆动镜122到所述照射区域的角度及所述聚光透镜的直径确定。在此,所述摆动镜122到所述照射区域的角度可根据所述摆动镜122的预设角度确定。
5.4包括光切断部的旋转多面镜
图17为用于说明一个实施例的包括光切断部的旋转多面镜的示意图。
激光雷达装置采用旋转多面镜1900的情况下,旋转多面镜1900可具有照射部分1951与受光部分1961。并且,所述激光雷达装置可具有包括照射部分1951的照射路径、包括受光部分1961的受光路径。然而在所述旋转多面镜1900的表面发生散射的情况下,激光雷达装置的激光输出部射出的激光也有可能不沿激光雷达装置的照射路径,而是在所述照射部分1951反射直接向传感器部反射。这会导致利用激光测定与对象体之间的距离的激光雷达装置的误差。
因此,所述旋转多面镜1900还可以包括配置在所述旋转多面镜1900的照射部分1951与受光部分1961之间的光切断部1940。所述光切断部1940能够防止被所述照射部分1951反射并被所述传感器部误感测。
并且,所述光切断部1940也可以配置在所述旋转多面镜1900上,也可以与所述旋转多面镜1900相隔配置。
并且,所述旋转多面镜1900的照射部分1951及受光部分1961相隔的情况下,所述光切断部1940可配置于所述照射部分1951与所述受光部分1961之间。
并且,所述光切断部1940可以由吸光材质构成。例如,可包括橡胶、布等。
6.摆动镜(Nodding mirror)
6.1结构
图18为用于示出一个实施例的摆动镜的示意图。
参见图18,一个实施例的摆动镜3100可包括反射面3120及主体3110,所述主体3110能够摆动所述反射面3120。并且,所述反射面3120可附着于所述主体3110上,也可以与所述主体3110电、机械连接。但所述摆动镜3100可以由上述构成中仅一部分构成,可包括更多构成要素。例如,所述摆动镜3100可以仅包括反射面3120,可以仅包括有反射涂层的主体3110。
所述反射面3120为用于反射获得的激光的面,可包括反射镜、可反射塑料等,但不限于此。
并且,所述反射面3120可以是圆形态,但不限于此,还可以是椭圆形、三角形、长方形、梯形等多种形态。
并且,所述主体3120能够通过电力、磁力、电磁力及/或机械性驱动力等摆动,但不限于此。
6.2视角(FOV:Field Of View)
激光雷达装置所需的视角(FOV)可根据其用途而异。例如,对用于三维地图(3DMap ping)的固定型激光雷达装置而言,可能需要向垂直、水平方向尽可能宽广的视角,对车辆上配置的激光雷达装置而言,可能相比于水平方向相对宽广的视角向垂直方向需要相对窄的视角。并且对无人机(Dron)上配置的激光雷达而言,可能需要向垂直、水平方向尽可能宽广的视角。
并且,在相同条件下缩窄视角的情况下,激光雷达装置的分辨率能够发生变化。例如,有两个仅视角不同的个激光雷达装置的情况下,视角更窄的激光雷达装置相比于视角相对更宽广的激光雷达装置能够对窄区域照射激光,因此激光的密集度能够增高。并且从而视角更窄的激光雷达装置的分辨率能够高于视角相对更宽广的激光雷达装置的分辨率。
并且,激光雷达装置的扫描区域可根据摆动镜的摆动角度确定,因此可根据所需的激光雷达装置的分辨率及视角确定摆动镜的摆动角度。例如,摆动镜通过变更激光的移动方向扩张激光雷达装置的扫描区域,摆动镜摆动1度的情况下扫描区域能够扩张2度。
6.3具有激光的最大直径以下的大小的摆动镜
激光雷达装置包括激光输出部的情况下,激光输出部射出的激光可以是圆形,但不限于此,还可以是椭圆形、长方形、正方形等形状。在此,激光的最大直径可以是激光的形状为圆形的情况下的直径,椭圆形的情况下的长直径(长半径的二倍),长方形的情况下的长边的长度,正方形的情况下的边长。
并且,摆动镜包括反射面的情况下,可用反射面的大小定义摆动镜的大小,摆动镜不包括反射面的情况下,可用主体中能够反射的主体的一部分定义摆动镜的大小。在此,摆动镜的大小可以是摆动镜为圆形的情况下的直径、椭圆形的情况下的长直径(长半径的二倍),长方形的情况下的长边的长度,正方形的情况下的边长。
并且,激光雷达装置附着于高速移动的移动体的情况下,激光雷达装置可能会需要快速的扫描速度。在此,若摆动镜的大小小的情况下能够最小化摆动镜的负担的同时加快摆动速度。
以下对摆动镜的大小为激光的最大直径以下的情况进行详细说明。
6.3.1摆动镜获得并反射的激光的量
图19为用于说明一个实施例的摆动镜反射的激光的量的示意图。
参见图19,可知入射的激光3200的最大直径D可大于摆动镜的反射面3120的直径d,相对于入射的所述激光3200的量的反射的激光3220的量。但附图是假设入射的激光3210、反射的激光3220及摆动镜的反射面3120为圆形示出的,但如以上所述不限于此。
设从激光输出部射出并向所述摆动镜的反射面3120入射的激光的全部量为X时,从所述摆动镜的反射面3120反射的激光的量可根据入射的激光3210的剖面的宽度3230与摆动镜的反射面3120中对入射的激光3210进行反射的部分的剖面的宽度3240确定。
具体来讲,设入射的所述激光3210的最大直径为D时,入射的所述激光3210的剖面的宽度为πD
因此该情况下,设所述摆动镜的反射面3120对入射的激光3200反射的量为x时,所述x可满足数学式x=Xd
因此,可根据包括所述摆动镜3100的激光雷达装置的需求改变所述摆动镜3100的配置。以下对所述摆动镜3100的配置进行更具体的说明。
6.3.2用于减小各摆动角度下摆动镜获得并反射的光量的差异的摆动镜的配置
激光雷达装置可以是用于利用激光测定从激光雷达装置到对象体的距离的装置,为此需要感测从对象体反射的激光。
并且,激光雷达装置向位于扫描区域上的对象体照射的激光从对象体反射时发生散射,因此激光雷达装置到对象体的距离越远,则对象体反射的激光被激光雷达装置感测到的量就可能越小。
因此,在相同条件下激光雷达装置的可测定距离可能与激光雷达装置向扫描区域照射的激光的强度相关。例如,激光雷达装置向扫描区域照射的激光的强度越强,则从对象体反射的激光的强度也能加强,从而激光雷达装置能够感测相对更远距离处的对象体反射的激光。
并且,摆动镜的大小小于射出的激光的直径的情况下,被所述摆动镜反射并向激光雷达装置的扫描区域照射的激光的强度能够随着摆动镜反射的激光的量变化。
并且,在一个实施例中,也可以构成为在激光雷达装置的扫描区域全范围可测定距离的差异减小。
图20为用于说明一个实施例的摆动镜反射的激光量的差异小的摆动镜的配置的示意图。
参见图20,可以设摆动镜为偏移状态3121时入射的所述激光3200的中心与所述摆动镜的反射面构成的角度为a,摆动镜的预设角度为-设定使得在偏移状态下摆动的角度-b时,可以视为在向逆时针方向最大程度摆动的状态3122下入射的所述激光3200的中心与所述摆动镜的反射面构成的角度为a+b/2,向顺时针方向最大程度摆动的状态3123下入射的所述激光3200的中心与所述摆动镜的反射面构成的角度为a-b/2。
在此,所述摆动镜的反射面反射的激光的量可在向顺时针方向最大程度摆动的状态3123下最小,向逆时针方向最大程度摆动的状态3122下最大。
并且,所述摆动镜的反射面反射的入射的激光3200的量为x时,所述x能够满足数学式x=Xd
因此,设向顺时针方向最大程度摆动的状态3123下反射的入射的激光3200的量为x+时可满足数学式x+=Xd
因此,为了使得在摆动的角度全范围下反射的入射的激光3200的量的差异为T%以下,可以使得所述摆动镜在偏移状态下的配置具有满足数学式
例如,为了使得所述摆动镜的预设角度b为10度,在摆动的角度全范围反射的入射的激光3200的量的差异T为5%以下,所述摆动镜应配置成与入射的所述激光3200的中心构成的角度a为73.7度以上。
6.3.3用于增大各摆动角度下摆动镜获得并反射的光量的差异的摆动镜的配置
激光雷达装置可以是用于利用激光测定从激光雷达装置到对象体的距离的装置,为此需要感测从对象体反射的激光。
并且,激光雷达装置向位于扫描区域上的对象体照射的激光从对象体反射时发生散射,因此激光雷达装置到对象体的距离越远,则对象体反射的激光被激光雷达装置感测到的量就可能越小。
因此,在相同条件下激光雷达装置的可测定距离可能与激光雷达装置向扫描区域照射的激光的强度相关。例如,激光雷达装置向扫描区域照射的激光的强度越强,则从对象体反射的激光的强度也能加强,从而激光雷达装置能够感测相对更远距离处的对象体反射的激光。
并且,摆动镜的大小小于射出的激光的直径的情况下,激光雷达装置向扫描区域照射的激光的强度能够随着摆动镜反射的激光的量变化。
并且,优选的是激光雷达装置在扫描区域全范围具有一定程度以上的可测定距离差。例如,激光雷达装置照射的激光与地面平行地照射的情况下,激光雷达装置照射的激光直至被位于扫描区域上的对象体反射为止会继续前进。然而激光雷达装置照射的激光向地面照射的情况下,激光雷达装置照射的激光至多可前进至被地面反射。并且在此,地面与激光雷达装置照射的激光的角度越大,则激光到达地面为止前进的距离就能越短。因此,优选的是使得能够前进至远距离处的情况和只能前进至短距离处的情况下激光雷达装置照射的激光的可测定距离存在差异。
图21为用于说明一个实施例的摆动镜反射的激光量的差异大的摆动镜的配置的示意图。
参见图21,可以视为摆动镜为偏移状态3124时入射的所述激光3200的中心与所述摆动镜的反射面构成的角度为a,设定使得摆动的预设角度为b,向逆时针方向最大程度摆动的状态3125下向入射的所述激光3200的中心与所述摆动镜的反射面构成的角度为a+b/2,向顺时针方向最大程度摆动的状态3126下入射的所述激光3200的中心与所述摆动镜的反射面构成的角度为a-b/2。
在此,向顺时针方向最大程度摆动的状态3126下所述摆动镜的反射面反射的激光的量最小,向逆时针方向最大程度摆动的状态3125下可最大。
并且,设所述摆动镜的反射面反射的入射的激光3200的量为x时,所述x可满足数学式x=Xd
因此,设向顺时针方向最大程度摆动的状态3126下反射的入射的激光3200的量为x+时,可满足数学式x+=Xd
因此,为了使得摆动的角度全范围下反射的入射的激光3200量的差异为U%以上,可使得所述摆动镜的偏移状态下的配置具有满足数学式
例如,为了使得所述摆动镜的预设角度b为10度,在摆动的角度全范围反射的入射的激光3200的量的差异U为15%以上,所述摆动镜应配置成与入射的所述激光3200的中心构成的角度a为47.2度以下。
6.3.4使得被摆动镜获得并反射的激光不返回的摆动镜的配置
设摆动镜的反射面反射的入射的激光3200的量为x时,所述x可满足数学式x=Xd
图22为用于说明一个实施例的用于防止摆动镜反射的激光返回的摆动镜的配置的示意图。
参见图22,可以视为摆动镜为偏移状态3127时入射的所述激光3200的中心与所述摆动镜的反射面构成的角度为a,设定的使得摆动的角度为b,向逆时针方向最大程度摆动的状态3128下入射的所述激光3200的中心与所述摆动镜的反射面构成的角度为a+b/2,向顺时针方向最大程度摆动的状态3129下入射的所述激光3200的中心与入射的所述激光3200的中心与所述摆动镜的反射面构成的角度为a-b/2。
在此,所述摆动镜的反射面与入射的所述激光3200的中心构成的角度最大的情况可以是向逆时针方向最大程度摆动的状态3128。
并且,入射的所述激光3200向入射的方向返回所需的入射的所述激光3200的中心与所述摆动镜的反射面构成的角度应为90度。
因此,用于防止入射的所述激光3200向入射的方向返回的偏移状态3127下入射的所述激光3200的中心与所述摆动镜的反射面构成的角度a应满足数学式a-b/2<90。
例如,所述摆动镜在10度这一角度范围摆动的情况下,所述摆动镜可能应配置成偏移状态3127下与入射的所述激光3200的中心构成小于85度的角度。
6.4预设角度变化的摆动镜
激光雷达装置是用于利用激光探测对象体的距离及位置的装置,能够以一定的视角(F OV)工作。并且视角表示可探测的区域,将激光雷达装置视为原点时可定义为扫描区域具有的角度范围。因此具有一定视角的激光雷达装置的照射区域的大小可随着距离增大而增大。
例如,激光雷达装置的垂直方向视角为20度且以视角的中心为基准设为上侧10度及下侧10度的情况下,距离所述激光雷达装置10m处的所述激光雷达装置的照射区域的大小为(20x tan10)m,距离所述激光雷达装置50m处的所述激光雷达装置的照射区域的大小为(100x tan10)m,距离所述激光雷达装置200m处的所述激光雷达装置的照射区域的大小可以为(400x tan10)m。在此,关于照射区域的大小,假设照射区域为平面,距离可表示激光雷达装置向与地面平行地照射的激光与照射区域相遇为止的距离。
并且,利用飞行时间法(TOF:Time Of Flight)测定距离的激光雷达装置可在所述激光雷达装置的视角范围照射限定次数的激光。因此由于能够照射限定次数的激光,因此所述激光雷达装置的照射区域的大小增大的情况下,各激光之间的距离能够变远。并且各激光之间的距离变远的情况下,相比于各激光之间的距离接近的情况,能够获得的关于对象体的信息可能减少。
因此,为了获得更多关于位于远距离的对象体的信息,可根据所要达到的探测距离变更视角。
6.4.1包括摆动镜的激光雷达装置.
图23为用于说明对应于摆动镜的摆动角度及距离的激光雷达装置的照射区域的大小的示意图。
参见图23,可以设激光雷达装置3300到照射区域3320的距离3330为k,摆动镜的预设角度为b,照射区域3320的大小为h。并且如上所述,随着摆动镜摆动1度,视角3310能够变更2度。因此摆动镜的预设角度为b的情况下所述激光雷达装置3300的视角3310为2b。其结果该情况下所述照射区域3320的大小h可满足数学式h=2k x tanb。
因此,所述激光雷达装置3300到所述照射区域3320的距离3330即k时所需的照射区域3320的大小为h的情况下,可将所述摆动镜的摆动角度b确定为满足数学式b=tan
并且,所述激光雷达装置3300能够根据所述激光雷达装置3300所附着的移动体的移动速度变更视角。例如,激光雷达装置所附着的移动体的移动速度相对快的情况下重要的可能是相对远距离的信息,激光雷达装置所附着的移动体的移动速度相对慢的情况下重要的可能是相对近距离的信息。因此远距离的信息重要的情况下激光雷达装置可缩窄视角,近距离的信息重要的情况下激光雷达装置可加宽视角。
并且,所述激光雷达装置3300为了变更视角3310而可变更摆动镜的预设角度。
并且,所述激光雷达装置3300能够根据所述激光雷达装置3300扫描的帧变更视角3310。例如,激光雷达装置可在第一帧中距离k为10m时,可具有使得照射区域的大小h为5m的视角28度,在第二帧中距离k为50m时,可具有使得照射区域的大小h为5m的视角5.8度,在第三帧中距离k为100m时,可具有使得照射区域的大小h为5m的视角2.8度,在第四帧中距离k为200m时,可具有使得照射区域的大小h为5m的视角1.4度。
并且,所述激光雷达装置3300为了变更视角3310而可变更摆动镜的预设角度。例如,视角为28度时,将摆动镜的预设角度b设为14度,视角为5.8度时,可以将摆动镜的预设角度b设为2.9度,视角为2.8度时,可以将摆动镜的预设角度b设为1.4度,视角为1.4度时,可以将摆动镜的预设角度b设为0.7度。
虽然图23示出了垂直方向视角,但不限于此,显然对水平方向视角也可以适用。
6.4.2包括摆动镜及旋转多面镜的激光雷达装置.
图24为用于说明一个实施例的激光雷达装置的视角的示意图。
参见图24,一个实施例的激光雷达装置可包括激光输出部、摆动镜、旋转多面镜及传感器部。
由于已在图1及图2对所述激光输出部110及所述传感器部130进行了说明,因此以下省略对所述激光输出部110及所述传感器部130的详细说明。
并且,所述摆动镜122能够通过向相对于地面垂直的方向持续变更所述激光输出部110射出的激光的移动方向,将激光的照射区域扩张成相对于地面垂直的方向的线形态。并且在此,所述旋转多面镜127能够通过向相对于地面水平的方向持续变更从所述摆动镜122照射的激光的移动方向,将激光的照射区域扩张成面形态,从而能够将所述激光雷达装置100的扫描区域扩张成面形态。因此,所述摆动镜122向垂直方向扩张扫描区域,所述旋转多面镜127能够向水平方向扩张扫描区域。
但图24为了说明所述摆动镜122的摆动角度所对应的激光雷达装置的视角而仅示出垂直方向的扫描区域。
并且,所述激光雷达装置100能够根据所述激光雷达装置100扫描的帧变更视角。并且,所述帧可以以所述旋转多面镜的一面为基准设置,也可以根据所述旋转多面镜的旋转设置。例如,所述激光雷达装置在第一帧中距离k为10m时,可具有使得照射区域3410的大小h为5m的视角28度,在第二帧中距离k为50m时,可具有使得照射区域3420的大小h为5m的视角5.8度,在第三帧中距离k为100m时,可具有使得照射区域3430的大小h为5m的视角2.8度,在第四帧中距离K为200m时,可具有使得照射区域3440的大小h为5m的视角1.4度。
并且,激光雷达装置为了变更视角而能够变更摆动镜的预设角度。例如,视角为28度时,可以将摆动镜的预设角度b设为14度,视角为5.8度时,将摆动镜的预设角度b设为2.9度,视角为2.8度时,将摆动镜的预设角度b设为1.4度,视角为1.4度时,将摆动镜的预设角度b设为0.7度。
6.5所述摆动镜的偏移状态与入射到所述摆动镜的激光之间的角度a的变更方法
图25及26为用于说明一个实施例的所述摆动镜的偏移状态与入射到所述摆动镜的激光之间的角度a的变更方法的示意图。
参见图25,对于预定地入射的激光3200,能够通过变更摆动镜3130的偏移状态变更所述摆动镜3130的偏移状态与入射到所述摆动镜3130的激光3200之间的角度a。
具体来讲,所述激光3200可以预定地向垂直的方向向所述摆动镜3130照射,所述摆动镜3130的偏移状态为第一状态3131的情况下,所述摆动镜3130的偏移状态与入射到所述摆动镜3130的激光3200之间的角度可成为a1。并且,所述摆动镜3130的偏移状态为第二状态3132的情况下,所述摆动镜3130的偏移状态与入射到所述摆动镜3130的激光3200之间的角度可成为a2。
因此,能够在保持所述激光3200向所述摆动镜3130照射的角度一定的同时变更所述摆动镜3130的偏移状态的角度,能够以此调节所述摆动镜3130的偏移状态与入射到所述摆动镜3130的激光之间3200的角度a。
参见图26,对于具有预定的偏移状态3133的摆动镜3130,能够通过变更向所述摆动镜3130照射的激光的角度变更所述摆动镜3130的偏移状态3133与入射到所述摆动镜3130的激光之间的角度a。
具体来讲,所述摆动镜3130可具有预定的偏移状态3133的角度,被照射第一状态的激光3250的情况下,所述摆动镜3130的偏移状态3133与入射到所述摆动镜3130的第一状态的激光3250之间的角度可成为a1。并且,被照射第二状态的激光3260的情况下,所述摆动镜3130的偏移状态3133与入射到所述摆动镜3130的第二状态的激光3260之间的角度可成为a2。
因此,能够在保持所述摆动镜3130的偏移状态3133的角度一定的同时变更所述激光的照射角度,能够以此调节所述摆动镜3130的偏移状态3133与入射到所述摆动镜的激光之间的角度a。
虽然图25及图26对变更所述摆动镜的偏移角度或所述激光的照射角度中仅一个进行了说明,但也可以对所述摆动镜的偏移角度及所述激光的照射角度都进行变更以调节所述摆动镜的偏移状态与入射到所述摆动镜的激光之间的角度a。
6.6还包括配置于摆动镜周边的反射镜的激光雷达装置.
图27为用于说明一个实施例的还包括配置在摆动镜周边的反射镜的激光雷达装置的示意图。
参见图27,一个实施例的激光雷达装置还可以包括配置于摆动镜3140周边的反射镜3500,所述反射镜3500的内部可包括所述摆动镜3140的反射面能够通过的空心空间。
在此,所述反射镜3500是用于反射获得的激光的面,可包括反射镜、可反射塑料等,但不限于此。
具体如图27所示,向所述摆动镜3140入射的激光3200的最大直径D可大于所述摆动镜3140的反射面的直径d。因此,所述摆动镜3140反射的激光的量可以是入射的所述激光3200的量的一部分。
并且,所述激光雷达装置可利用所述摆动镜3140反射的激光探测与位于所述激光雷达装置的扫描区域上的对象体之间的距离。
在此,所述激光雷达装置为了进一步地利用向所述摆动镜3140入射的激光3200中未被所述摆动镜3140反射的激光3270探测与位于所述激光雷达装置的扫描区域上的对象体之间的距离,还可以包括配置在所述摆动镜3140的周边的反射镜3500。因此,所述反射镜3500能够反射入射的所述激光3200中未从所述摆动镜3140反射的激光3270的一部分。
优选的是所述反射镜3500的直径大于入射的所述激光3200的最大直径D,但不限于此,可小于等于入射的所述激光3200的最大直径D。
并且如图27所示,在所述摆动镜3140周边配置所述反射镜3500的情况下,可利用未从所述摆动镜3140反射的激光3270的一部分进一步地探测与位于所述激光雷达装置的扫描区域上的对象体之间的距离。并且,所述摆动镜3140的摆动角度与所述反射镜3500的配置角度一致的情况下,整体上反射的激光的量增加,因此在该位置可增大所述激光雷达装置的测定距离。
但图27示出了所述反射镜3500配置成与所述摆动镜3140的偏移状态具有相同的角度,但所述反射镜3500也可以配置成具有不同于所述摆动镜3140的偏移状态的角度。
7.生成扫描图案的激光雷达装置.
再次参见图2,生成扫描图案的激光雷达装置可包括激光输出部、扫描部及传感器部。并且,所述激光雷达装置可包括激光输出部、传感器部但扫描部除外,也可以包括多个扫描部。
并且,所述激光输出部110包括多个激光输出元件的情况下,从所述激光雷达装置照射的激光的方向可以因所述多个激光输出元件的工作位置而异,从而所述激光雷达装置可具有扫描图案。
其中,扫描图案可示出激光雷达装置100向外部照射的激光的照射类型,扫描图案可以是至少一个以上。所述扫描部120能够通过变更所述激光输出部110射出的激光的移动方向变更所述激光雷达装置照射的激光的方向,并且能够通过使所述激光输出部110射出的激光发散或变更相位以变更所述激光雷达装置照射的激光的大小或变更方向。
并且,所述扫描部120变更所述激光雷达装置照射的激光的方向或大小的情况下,所述激光雷达装置可具有与变更的激光的方向或大小对应的扫描图案。
并且,有多个所述扫描部120的情况下,例如所述扫描部120包括第一扫描部及第二扫描部时,所述第一扫描部及第二扫描部可全部工作生成扫描图案,也可通过控制所述第一扫描部或第二扫描部中任意一个的工作生成扫描图案。
所述传感器部130能够感测位于作为激光雷达装置100的可探测区域的扫描区域内的对象体反射的激光。
7.1扫描图案
图28为用于示出一个实施例的激光雷达装置及激光雷达装置照射的激光的方向的示意图。
参见图28,激光雷达装置照射的激光可具有从所述激光雷达装置向周边照射的方向,所述激光雷达装置可具有视角。
所述视角可以是激光雷达装置照射一定时长的激光的方向的最大值与最小值的差异。例如,向垂直方向照射的激光的方向最大为10度、最小为-10度的情况下,所述激光雷达装置的垂直方向视角(FOV(V))可以是20度,向水平方向照射的激光的方向最大为60度、最小为-60度的情况下,所述激光雷达装置的水平方向视角(FOV(H))可以是120度。
并且,激光雷达装置照射的激光的方向可以用以所述激光雷达装置为原点的坐标(θ,
并且,激光雷达装置附着于自动驾驶车辆等移动体使用的情况下,可能会需要快速地感测、准确地识别位于所述激光雷达装置所附着的移动体的周边的对象体,对所述对象体的感测速度及识别准确性可随着所述激光雷达装置的扫描图案而异。因此,所述激光雷达装置的扫描图案可起到决定所述激光雷达装置的性能的重要要素的作用。
7.1.1决定图案的要素.
如上所述,可用(θ(t),
并且,所述扫描图案(θ(t),
图29为用坐标图示出一个实施例的激光雷达装置的扫描图案的示意图。
参见图29,关于一个实施例的激光雷达装置的扫描图案的坐标图可画成在所述激光雷达装置的垂直方向视角(FOV(V))及水平方向视角(FOV(H))范围具有一定形态,所述激光雷达装置照射的激光的方向可用以所述激光雷达装置为原点的坐标表示。例如,设在任意时间点t1所述激光雷达装置照射的激光的方向为(θ1,
并且,参见图29,所述激光雷达装置照射的激光的方向可具有在相同时长向垂直方向往复20次的图案,可具有向水平方向单向移动一次的图案。因此,所述激光雷达装置的扫描图案可具有关系
图30为按各成分及时间用坐标图示出一个实施例的激光雷达装置的扫描图案的示意图。
参见图30,所述激光雷达装置的扫描图案(θ(t),
因此,作为所述激光雷达装置的扫描图案(θ(t),
以下为了便于说明,可以以所述θ(t)为水平方向图案,所述
7.1.2具有垂直方向图案的周期比水平方向图案的周期短的扫描图案的激光雷达装置.
再次参见图30,一个实施例的激光雷达装置的扫描图案包括垂直方向图案
例如,图6用坐标图示出水平方向图案的周期(T
7.1.2.1具有隔着时间间隔生成的扫描图案的激光雷达装置.
图31为按各成分及时间用坐标图示出另一实施例的激光雷达装置的扫描图案的示意图。
参见图31,一个实施例的激光雷达装置的扫描图案8200包括垂直方向图案8210及水平方向图案8220,反复的所述垂直方向图案8210之间可包括不生成图案的时间8211,并且,所述激光雷达装置的扫描图案8200的所述水平方向图案8220之间还可以包括不生成图案的时间8221。
在此,不生成所述扫描图案的时间8211、8221可以是所述激光雷达装置用于输出激光的时间,还可以是用于获知所述激光雷达装置照射的激光的方向的时间,还可以是用于同步化包含于所述激光雷达装置的构成之间的时间的时间。并且不限于此,可以是用于输出激光的时间、用于计算距离的时间、用于同步化时间的时间、用于减少伴随激光输出的发热的时间等所述激光雷达装置准确、迅速地工作所需的时间。
具体来讲,反复的所述垂直方向图案8210之间不生成图案的时间8211可以如图31包含于反复的所述垂直方向图案8210之间中一部分,虽然图31并未示出,但可以包含于每个反复的所述垂直方向图案8210之间。
并且,反复的所述水平方向图案8220之间不生成图案的时间8221可以如图31包含于反复的所述水平方向图案8220之间中一部分,虽然图31并未示出,但可以包含于每个反复的所述水平方向图案8220之间。
并且,不生成所述扫描图案的时间8211、8221可以是包含于所述激光雷达装置的激光输出部不输出激光的时间,可以是包含于所述激光雷达装置的扫描器部不向所述激光雷达装置的外部照射激光的时间。
7.1.2.2具有垂直方向视角随着水平方向图案的周期变化的扫描图案的激光雷达装置.
图32为按各成分及时间用坐标图示出又一个实施例的激光雷达装置的扫描图案的示意图。
参见图32,一个实施例的激光雷达装置的扫描图案8300包括水平方向图案8320及垂直方向图案8310,所述垂直方向视角(FOV(V))可随着所述水平方向图案8320的各周期变化。具体来讲,所述激光雷达装置的扫描图案8300可包括第一水平图案周期8321及第二水平图案周期8322。并且如图32所示,所述激光雷达装置的扫描图案8300中第一水平图案周期8321及第二水平图案周期8322具有相同的时间值,可具有相同的最大值及最小值,但不限于此,所述第一水平图案周期及第二水平图案周期也可以具有不同的时间值及/或不同的最大值及最小值。
并且,所述激光雷达装置的扫描图案8300的第一水平图案周期8321期间生成的垂直方向图案8311的最大值8331及最小值8332可不同于第二水平图案周期8322期间生成的垂直方向图案8312的最大值8341及最小值8342。例如,所述第二水平图案周期8322期间生成的垂直方向图案8312的最大值8341及最小值8342的差异8343可小于所述第一水平图案周期8321期间生成的垂直方向图案8311的最大值8331及最小值8332的差异8333。在此,设所述第一水平方向图案周期8321期间为第一帧,所述第二水平方向图案周期8322期间为第二帧时,所述第二帧的垂直视角(FOV(V))可小于所述第一帧的垂直视角(FOV(V))。激光雷达装置中决定所述激光雷达装置的工作的其他要素相同的同时视角变窄可表示可扫描区域减小,从而可表示通过使得在窄的地区进行更有密集度的扫描以提高所述激光雷达装置的分辨率。
并且,所述激光雷达装置的扫描图案8300可在水平方向图案的各周期具有不同的垂直视角(FOV(V)),可以在所述水平方向图案的每2周期具有不同的垂直视角(FOV(V)),可以在所述水平方向图案的各周期具有不同的垂直视角(FOV(V)),并且所述水平方向图案的每4周期反复,但不限于此,可根据需要灵活地变化。
7.1.2.3具有垂直方向图案的中间值随着水平方向图案的周期变化的扫描图案的激光雷达装置.
图33为按各成分及时间用坐标图示出又一个实施例的激光雷达装置的扫描图案的示意图。
参见图33,一个实施例的激光雷达装置的扫描图案8400包括水平方向图案8420及垂直方向图案8410,所述垂直方向图案8410的中间值8433、8443可随着所述水平方向图案8420的周期8421、8422变化。在此,所述垂直方向图案8410的中间值8433、8443可表示所述垂直方向图案8410的最大值8431、8441及最小值8432、8442的中间值。
如图33所示,所述水平方向图案8420可包括第一水平方向图案周期8421及第二水平方向图案周期8422。并且,所述垂直方向图案8410可包括作为所述第一水平方向图案周期8421期间生成的垂直方向图案8411的中间值的第一中间8433值及所述第二水平方向图案周期8422期间生成的垂直方向图案8412的中间值的第二中间值8443。在此,所述第一中间值8433可大于所述第二中间值8443,但不限于此,所述第一中间值8433也可以小于所述第二中间值8443。
并且,所述第一水平方向图案周期8421期间生成的所述垂直方向图案8411的最小值8432可小于所述第二水平方向图案周期8422期间生成的所述垂直方向图案8412的最大值8441,但不限于此,所述第一水平方向图案周期8421期间生成的所述垂直方向图案8411的最小值8432可大于所述第二水平方向图案周期8422期间生成的所述垂直方向图案8412的最大值8441。
并且,图34为用坐标图示出1帧时长的图33的一个实施例的激光雷达装置的扫描图案的示意图,参见图34,一个实施例的激光雷达装置可以以所述第一水平方向图案周期及所述第二水平方向图案周期为1帧。在此,如图34所示,所述激光雷达装置在1帧期间能够扫描更多垂直方向的中间部分。
并且,所述激光雷达装置的1帧的垂直视角(FOV(V))可以是所述第一水平方向图案周期期间生成的所述垂直方向图案的最大值及所述第二水平方向图案周期期间生成的所述垂直方向图案的最小值的差异。
因此,相比于在相同的时长生成1帧的激光雷达装置,所述激光雷达装置在1帧期间能够扫描更多垂直方向的中间部分。
激光雷达装置是利用激光得到与包含于扫描区域内的对象体之间的距离信息的装置,利用激光生成扫描点。因此激光雷达装置在一定时长能够生成的扫描点的数量上可能会存在限制。因此,是用于自动驾驶车辆等的激光雷达装置的情况下,可能需要以相同扫描点扫描更多的重要部分,是具有如所述图33及图34所示的扫描图案的激光雷达装置的情况下,在相同时长能够扫描更多重要部分。
7.1.2.4从激光雷达装置照射的激光随时间发生的方向的变化程度变化的激光雷达装置.
图35为按各成分及时间用坐标图示出又一个实施例的激光雷达装置的扫描图案的示意图。
参见图35,一个实施例的激光雷达装置可具有所述激光雷达装置照射的激光随时间发生的方向的变化程度变化的扫描图案8500。在此,所述激光雷达装置照射的激光随时间发生的方向的变化可以是扫描图案变化速度。具体来讲,可以将随时间发生的水平方向成分的变化量或随时间发生的垂直方向成分的变化量称为扫描图案变化速度。
如图35所示,所述激光雷达装置的扫描图案8500可具有水平方向图案8520及垂直方向图案8510。并且,对所述水平方向图案8520而言,所述激光雷达装置照射的激光随时间发生的方向的变化程度可变。例如,到第一时间点8531为止所述水平方向图案8520具有第一速度,在所述第一时间点8531所述水平方向图案8520位于第一位置8521,所述垂直方向图案8510可位于3周期后的位置8511。并且,从第一时间点8531到第二时间点8532为止所述水平方向图案8520具有第二速度,在所述第二时间点8532所述水平方向图案8520位于第二位置8522,所述垂直方向图案8510可位于17周期后的位置8512。并且从第二时间点到第三时间点为止所述水平方向图案8520具有第三速度,在所述第三时间点8533所述水平方向图案8520位于最大值8523,所述垂直方向图案8510可位于20周期后的位置8513。因此在此,所述第二速度可比所述第一速度及所述第三速度慢。虽然图35并未示出,但所述第二速度可比所述第一速度及所述第三速度快。
并且,图36为用坐标图示出1帧时长的图35的一个实施例的激光雷达装置的扫描图案的示意图,参见图36,一个实施例的激光雷达装置可以以水平方向图案周期(T
因此,相比于在相同时长生成1帧的激光雷达装置,所述激光雷达装置能够扫描更多水平方向的中间部分。
其结果,是具有如所述图35及图36所示的扫描图案的激光雷达装置的情况下,在相同时长能够扫描更多重要部分。
并且,图37为按各成分及时间用坐标图示出又一个实施例的激光雷达装置的扫描图案的示意图,参见图37,一个实施例的激光雷达装置的扫描图案8550可具有水平方向图案8570及垂直方向图案8560,对于所述垂直方向图案8560,所述激光雷达装置照射的激光随时间发生的方向的变化程度可变。例如,如图37所示,所述垂直方向图案8560可具有正弦波(Sinusoidal)的速度。虽然图37并未示出,但在所述垂直方向图案8560中所述垂直方向图案的最大值8561及最小值8562附近的速度可比所述垂直方向图案的中间值附近的速度更快。
7.1.2.5垂直方向图案的初始位置随着水平方向图案的周期变化的激光雷达装置.
一个实施例的激光雷达装置可具有垂直方向图案的初始位置随着水平方向图案的周期变化的扫描图案。在此,所述垂直方向图案的初始位置可表示所述水平方向图案开始的时间点的激光照射方向的垂直成分。例如,设所述水平方向图案的1周期开始的时间点为t1时,在所述t1所述激光的照射方向的水平成分可以是-FOV(H)/2,垂直成分可以是+FOV(V)/2。并且,设所述水平方向图案的2周期开始的时间点为t2时,在所述t2所述激光的照射方向的水平成分可以是-FOV(H)/2,垂直成分可以是+FOV(V)/4。
并且,所述垂直方向图案的初始位置不随所述水平方向图案的周期变化的激光雷达装置在将所述水平方向图案的2周期设为1帧的情况下,所述水平方向图案的2周期期间对同一部分扫描两次,而所述垂直方向图案的初始位置随着所述水平方向图案的周期变化的激光雷达装置在将所述水平方向图案的2周期设为1帧的情况下,所述水平方向图案的2周期期间继续扫描其他部分。因此,与所述垂直方向图案的初始位置不随所述水平方向图案的周期变化的激光雷达装置相比,所述垂直方向图案的初始位置随着所述水平方向图案的周期变化的激光雷达装置可具有更高的分辨率。
7.1.3具有水平方向图案的周期比垂直方向图案的周期短的扫描图案的激光雷达装置.
图38为按各成分及时间用坐标图示出又一个实施例的激光雷达装置的扫描图案的示意图。
参见图38,一个实施例的激光雷达装置的扫描图案8600包括垂直方向图案8610及水平方向图案8620,所述水平方向图案8620的周期T
例如,图39为示出图38的一个实施例的激光雷达装置的扫描图案的坐标图,具体来讲,是示出垂直方向图案8610的一个周期
7.1.3.1具有垂直方向视角随着垂直方向图案的周期变化的扫描图案的激光雷达装置.
图40为按各成分及时间用坐标图示出又一个实施例的激光雷达装置的扫描图案的示意图。
参见图40,一个实施例的激光雷达装置的扫描图案包括水平方向图案8720及垂直方向图案8710,所述垂直方向视角可随着所述垂直方向图案8710的各周期变化。具体来讲,所述激光雷达装置的扫描图案8700可包括第一垂直方向图案及第二垂直方向图案。并且如图40所示,所述激光雷达装置的扫描图案8700中第一垂直方向图案及第二垂直方向图案可具有相同周期值,但不限于此,所述第一垂直方向图案及第二垂直方向图案也可具有不同的周期值。
并且,所述激光雷达装置的扫描图案8700的第一垂直方向图案周期8711期间生成的垂直方向图案8710的最大值8731及最小值8732可不同于第二垂直方向图案周期8712期间生成的垂直方向图案8710的最大值8741及最小值8742。例如,所述第二垂直图案周期8712期间生成的垂直方向图案8710的最大值8741及最小值8742的差异8743可小于所述第一垂直图案周期8711期间生成的垂直方向图案8710的最大值8731及最小值8732的差异8733。在此,将所述第一垂直方向图案周期8711期间作为第一帧,将所述第二垂直方向图案周期8712期间作为第二帧时,所述第二帧的垂直视角(FOV(V))可小于所述第一帧的垂直视角(FOV(V))。激光雷达装置中决定所述激光雷达装置的工作的其他要素相同的同时视角变窄可表示可扫描区域减小,从而可表示通过使得在窄的地区进行更有密集度的扫描以提高所述激光雷达装置的分辨率。
并且,所述激光雷达装置的扫描图案8700可在垂直方向图案的各周期具有不同的垂直视角(FOV(V)),可以在所述垂直方向图案的每2周期具有不同的垂直视角(FOV(V)),可以在所述垂直方向图案的各周期具有不同的垂直视角(FOV(V)),并且所述垂直方向图案的每4周期反复,但不限于此,可根据需要灵活地变化。
7.1.3.2具有垂直方向图案的中间值随着垂直方向图案的周期变化的扫描图案的激光雷达装置.
图41为按各成分及时间用坐标图示出又一个实施例的激光雷达装置的扫描图案的示意图。
参见图41,一个实施例的激光雷达装置的扫描图案8800包括水平方向图案8820及垂直方向图案8810,所述垂直方向图案8810的中间值8833、8843可随着所述垂直方向图案8810的周期8811、8812变化。在此,所述垂直方向图案8810的中间值8833、8843可表示所述垂直方向图案8810的最大值8831、8841及最小值8832、8842的中间值。
如图41所示,所述垂直方向图案8810可包括第一垂直方向图案周期8811及第二垂直方向图案周期8812。并且,所述垂直方向图案8810可包括作为所述第一垂直方向图案周期8811期间生成的垂直方向图案的中间值的第一中间值8833及作为所述第二垂直方向图案周期8812期间生成的垂直方向图案的中间值的第二中间值8843。在此,所述第一中间值8833可大于所述第二中间值8843,但不限于此,所述第一中间值8833也可以小于所述第二中间值8843。
并且,所述第一垂直方向图案周期8811期间生成的所述垂直方向图案8810的最小值8832可小于所述第二垂直方向图案周期8812期间生成的所述垂直方向图案8810的最大值8841,但不限于此,所述第一垂直方向图案周期8811期间生成的所述垂直方向图案8810的最小值8832可大于所述第二垂直方向图案周期8812期间生成的所述垂直方向图案8810的最大值8841。
并且,图42为用坐标图示出图41的一个实施例的激光雷达装置的扫描图案的示意图,参见图42,一个实施例的激光雷达装置可将所述第一垂直方向图案周期8811及所述第二垂直方向图案周期8812作为1帧。在此,如图42所示,所述激光雷达装置在1帧期间可扫描更多垂直方向的中间部分。
并且,所述激光雷达装置的1帧的垂直视角(FOV(V))可以是所述第一垂直方向图案周期期间生成的所述垂直方向图案的最大值及所述第二垂直方向图案周期期间生成的所述垂直方向图案的最小值的差异。
因此,与在相同时长生成1帧的激光雷达装置相比,所述激光雷达装置在1帧期间能够扫描更多垂直方向的中间部分。
激光雷达装置是利用激光得到与包含于扫描区域内的对象体之间的距离信息的装置,利用激光生成扫描点。因此,激光雷达装置在一定时长能够生成的扫描点的数量上可能存在限制。因此,是用于自动驾驶车辆等的激光雷达装置的情况下,重要的是以相同扫描点扫描更多重要部分,是具有如所述图41及图42所示扫描图案的激光雷达装置的情况下,在相同时长可扫描更多重要部分。
7.2包括摆动镜及旋转多面镜的激光雷达装置.
再次参见图4,一个实施例的激光雷达装置可包括激光输出部、摆动镜、旋转多面镜及传感器部。并且,所述激光雷达装置可生成扫描图案。
所述激光输出部110及所述传感器部130已在图1及图2进行了说明,因此以下省略对所述激光输出部110及所述传感器部130的详细说明。
所述摆动镜122可以是上述第一扫描器部121的一个实施例。所述摆动镜122可以以一个轴为基准在预设角度范围摆动,也可以以两个轴为基准在预设角度范围摆动。在此,所述摆动镜可生成所述扫描图案,具体来讲,所述扫描图案包括水平方向图案及垂直方向图案,所述摆动镜可生成所述垂直方向图案。
并且,所述旋转多面镜127可以是上述所述第二扫描仪126的一个实施例。所述旋转多面镜127能够以一个轴为基准旋转。在此,所述旋转多面镜能够生成所述扫描图案,具体来讲,所述旋转多面镜能够生成所述水平方向图案。
并且,所述水平方向图案及所述垂直方向图案包括各图案反复的周期,可包括最大值及最小值。在此,所述垂直方向图案的周期、最大值及最小值可取决于所述摆动镜,所述水平方向图案的周期、最大值及最小值可取决于所述旋转多面镜。
并且,所述激光雷达装置能够生成如图28及图29所示的扫描图案。具体来讲,所述激光雷达装置为了生成所述垂直方向图案的周期比所述水平方向图案的周期短的扫描图案,所述摆动镜的摆动速度可快于所述旋转多面镜的旋转速度。并且该情况下,在所述旋转多面镜的制造工序中所述旋转多面镜的反射面的斜率不一定的情况下,也能够使得对所述激光雷达装置的扫描准确度造成的影响小。具体来讲,所述摆动镜的摆动速度比所述旋转多面镜的旋转速度快一定水平以上的情况下,可以以所述旋转多面镜旋转相当于构成所述旋转多面镜的一面的角度的时间为1帧,因此即使各旋转多面镜的反射面的斜率有误差也能够通过多个帧弥补。
并且,所述激光雷达装置可生成如图31所示的扫描图案。具体来讲,所述激光雷达装置为了在所述垂直方向图案之间生成包括不生成图案的时间的扫描图案,所述激光输出部也可以具有不输出激光的时间,还可以具有所述摆动镜向所述激光雷达装置的内部反射激光的时间。
并且,所述激光雷达装置为了在所述水平方向图案之间生成包括不生成图案的时间的扫描图案,所述激光输出部可具有不输出激光的时间,还可以具有所述摆动镜向所述激光雷达装置的内部反射激光的时间。
并且,所述激光雷达装置可生成如图32所示的扫描图案。具体来讲,所述激光雷达装置为了生成所述垂直方向视角随着所述水平方向图案的各周期变化的扫描图案,所述摆动镜的摆动角度可根据所述旋转多面镜的旋转角度变化。例如,所述旋转多面镜的反射面有四个的情况下,所述摆动镜的摆动角度可以每当所述旋转多面镜旋转360/n时发生变化。具体来讲,所述摆动镜的摆动角度在所述旋转多面镜旋转360/n期间为10度,所述旋转多面镜下次旋转360/n期间可以是5度。
并且,所述激光雷达装置可生成如图33及图34所示的扫描图案。具体来讲,所述激光雷达装置为了生成所述垂直方向图案的中间值随着所述水平方向图案的周期变化的扫描图案,所述旋转多面镜的各反射面的斜率可互异。
例如,图43为关于一个实施例的激光雷达装置的旋转多面镜的示意图,参见图43,一个实施例的激光雷达装置的旋转多面镜8900包括旋转轴8950及多个反射面8910、8920、8930、8940。并且,所述多个反射面8910、8920、8930、8940可以以所述旋转轴8950为基准以不同的角度倾斜。并且该情况下,所述垂直方向图案的中间值可随着所述旋转多面镜8900的反射面8910、8920、8930、8940的倾斜程度变化。具体来讲,所述旋转多面镜的第一面8910以旋转轴为基准倾斜第一角度,所述旋转多面镜的第二面8920以所述旋转轴为基准倾斜第二角度8970。在此,通过所述第一面8910生成的垂直方向图案的中间值取决于所述第一角度,通过所述第二面8920生成的垂直方向图案的中间值可取决于所述第二角度8970。
并且,所述激光雷达装置能够生成如图35及图36所示的扫描图案。具体来讲,所述激光雷达装置为了生成所述激光雷达装置照射的激光随时间发生的方向的变化程度变化的扫描图案,所述摆动镜的摆动速度可不随摆动角度保持一定,所述旋转多面镜的旋转速度可不随旋转角度保持一定。
例如,为了变更所述水平方向图案的速度而可变更所述旋转多面镜的旋转速度,为了使得所述垂直方向图案的速度以正弦波(Sinusoidal)形态变化,所述摆动镜的摆动速度可以是正弦波(Sinusoidal)形态。
并且,所述激光雷达装置能够生成图38及图39所示的扫描图案。具体来讲,所述激光雷达装置为了生成所述水平方向图案的周期比所述垂直方向图案的周期短的扫描图案,所述旋转多面镜的旋转速度可快于所述摆动镜的摆动速度。
并且,所述激光雷达装置可生成如图40所示的扫描图案。具体来讲,所述激光雷达装置为了生成所述垂直方向视角随着所述垂直方向图案的各周期变化的扫描图案,所述摆动镜的摆动角度可在所述摆动镜每摆动一次发生变化。例如,所述摆动镜的摆动角度第n次摆动时是10度,第n+1次摆动时可以是5度。
并且,所述激光雷达装置能够生成图41及图42所示的扫描图案。具体来讲,所述激光雷达装置为了生成所述垂直方向图案的中间值随着所述垂直方向图案周期变化的扫描图案,所述摆动镜的摆动角度的最大值及最小值可变化。例如,设所述第一垂直方向图案的最大值为第一最大值,最小值为第一最小值,所述第二垂直方向图案的最大值为第二最大值,最小值为第二最小值时,所述摆动镜可具有在所述第一最大值以所述第一最小值摆动,在所述第一最小值以所述第二最大值摆动,在所述第二最大值以所述第二最小值摆动,在所述第二最小值以所述第一最大值摆动的摆动角度。
实施例的方法可构成为能够通过多种计算机手段运行的程序命令形态并存储在计算机可读介质。所述计算机可读介质可包括程序命令、数据文件、数据结构中一种或其组合。存储在所述介质中的程序命令可以是为实施例而专门设计和构成的,或者是计算机软件技术人员公知使用的。作为计算机可读存储介质例子,可包括硬盘、软盘及磁带等磁介质(magnetic media)、CD-ROM、DVD之类的光存储介质(optical media)、软光盘(flopticaldisk)之类的磁-光介质(magneto-optical media)及只读存储器(ROM)、随机存取存储器(RAM)、闪存盘等为了存储和运行程序命令而专门构成的硬件装置。作为程序命令的例子,不仅包括通过编译器得到的机器代码,还包括能够用解释器通过计算机运行的高级语言代码。可以将上述硬件装置可构成为为了执行实施例的工作而作为一个以上的软件模块工作,反之相同。
以上通过限定的实施例及附图说明了实施例,但本领域普通技术人员可以在所述记载的基础上进行多种修改及变形。例如,说明的技术按照不同于说明方法的其他顺序执行及/或说明的系统、结构、装置、电路等构成要素按照不同于说明方法的其他方式结合或组合,或者由其他构成要素或等同物替换或置换也能够得到适当的结果。
因此,其他实施方式、其他实施例及与权利要求范围等同的也属于所附权利要求的范围。
- 用于激光雷达系统的发送光学系统、用于激光雷达系统的光学装置、激光雷达系统和工作设备
- 用于激光雷达发光装置的驱动装置和激光雷达