搬运机器人集成末端手爪
文献发布时间:2023-06-19 09:32:16
技术领域
本发明属于搬运机器人领域,特别涉及一种搬运机器人集成末端手爪。
背景技术
随着航天技术的飞速发展、工业化水平的不断提高,航天装置中零件的种类越来越多,形状越来越复杂,这对零件的装配搬运提出了更高的要求。在实际现场的装配搬运过程中,对于航天装置中凸台式轴类、把手式箱体类零件的搬运,一般采用人工方式将零件搬运至装配位置。人工干预容易调整对位,具有人工可调、方式简单和便于装配的优点,但是在实际车间装配搬运中采用人工方式不仅耗时、耗力、安全性无法保证,且有些工况位置是搬运人员无法达到的;如果采用现有天车绳吊方式,由于无法找准质心位置,难以保证工件平稳起吊搬运,极易出现侧翻引发安全事故。此外,考虑到现场工作空间、复杂程度等情况,采用两种不同特征的集成末端手爪分别对凸台式轴类零件和把手式箱体类零件进行起吊搬运是不允许的,因此现在急需一种同时满足两种零件起吊搬运的机器人集成末端手爪。
发明内容
针对上述问题本发明提供一种搬运机器人集成末端手爪,其能同时对凸台式轴类零件和把手式箱体类零件进行搬运,并且通过设置吊环移动装置保证起吊时集成末端手爪质心与工件质心共线,防止工件搬运过程中出现偏转、侧翻;通过设置手爪调姿平台和两对手爪,实现对工件的同步抓取,保证搬运过程中工件的安全平稳。
本发明的技术方案是提供一种搬运机器人集成末端手爪,其包括吊环移动装置、手爪调姿平台和手爪,其中所述吊环移动装置安装在所述手爪调姿平台上,所述手爪通过第一手爪连杆、第二手爪连杆与所述手爪调姿平台上的手爪连接架铰接;
所述吊环移动装置包括固定安装在手爪调姿平台上的吊环导轨、能滑动地安装在吊环导轨上的吊环滑块以及导轨钳制器,打开导轨钳制器能实现吊环滑块在吊环导轨上的移动,闭合导轨钳制器时能实现吊环滑块在吊环导轨上的锁紧;
所述手爪调姿平台包括上平台、花键轴、花键轴减速器、花键轴第一同步轮、花键轴第二同步轮、花键轴同步带、双向丝杠第二同步轮、双向丝杠同步带、双向丝杠第一同步轮、双向丝杠减速器、双向丝杠、手爪连接架、手爪连接架滑块、手爪连接架导轨以及花键锥齿轮;所述花键轴减速器固定安装在上平台上,所述花键轴第一同步轮与花键轴减速器的输出轴固定连接,所述花键轴同步带分别与所述花键轴第一同步轮和所述花键轴第二同步轮啮合连接,所述花键轴第二同步轮与花键轴固定连接,所述双向丝杠减速器固定安装在上平台上,所述双向丝杠第一同步轮与双向丝杠减速器输出轴固定连接,所述双向丝杠同步带分别与所述双向丝杠第一同步轮和所述双向丝杠第二同步轮啮合连接,所述双向丝杠第二同步轮与双向丝杠固定连接;所述手爪连接架导轨分别固定安装在上平台上;所述手爪连接架滑块两两滑动地安装在每条手爪连接架导轨上,两两一组的手爪连接架滑块分别与所述手爪连接架的两侧下表面固定安装;通过双向丝杠和手爪连接架滑块实现两侧的手爪连接架在手爪连接架导轨上的同步相向或背向移动;所述花键锥齿轮滑动地安装在花键轴的两侧,并且能随两侧手爪连接架的相对同步移动实现在花键轴上的相对同步运动;
所述手爪包括第一缺齿齿轮、第二缺齿齿轮、第一手爪连杆、第二手爪连杆、竖直丝杠螺母、连杆滑块、末端夹具和抓手;所述第一缺齿齿轮固定安装在第一手爪连杆上,所述第二缺齿齿轮固定安装在第二手爪连杆上,第一缺齿齿轮与第二缺齿齿轮组成缺齿啮合传动,实现第一手爪连杆与第二手爪连杆的同步开合;所述第一手爪连杆与第二手爪连杆组合成两对手爪连杆,分别转动连接在手爪连接架上;所述竖直丝杠螺母分别转动连接在两侧手爪连接架内的竖直丝杠上,实现两侧连杆滑块随两个竖直丝杠的同步转动而同步直线滑动;所述末端夹具共包括四个,其两两一组且圆弧段部相向分布,分别固定安装在两侧的两对手爪连杆上;所述抓手共包括四个抓手,其两两抓手一组且抓手的尖端部相向分布,分别滑动地安装在所述末端夹具的圆弧段部的后侧。
进一步,所述手爪还包括:抓手滑块、抓手导轨、抓手导轨扣件、抓手极限卡位和抓手复位弹簧;所述抓手的上表面分别与每个抓手滑块固定安装,所述抓手的后端方形部连接所述抓手复位弹簧,实现抓手工作时受弹簧力的位置调整与自动复位;所述抓手滑块滑动地安装在每个抓手导轨上,抓手滑块的上端面固定安装在每个所述抓手上;所述抓手导轨固定安装在每个所述末端夹具圆弧段部的后侧凸出平台的下表面;所述抓手导轨扣件沿着抓手尖端部方向倒扣在每个抓手导轨的前端,并且固定安装在每个所述末端夹具上,增强抓手导轨与末端夹具的连接强度;所述抓手极限卡位沿着抓手后端方形部方向倒扣在抓手导轨的后端,并且固定安装在每个所述末端夹具上,实现对抓手在抓手导轨上移动的极限位置的限制。
更进一步,所述手爪还包括:四个小连杆、一个轴向定位条、四个箱体导向条和二个高度定位条,所述小连杆的第一端转动连接在所述连杆滑块上,所述小连杆的第二端转动连接在手爪连杆上,四个小连杆两两一组转动连接在两侧连杆滑块与两对手爪连杆上;所述一个轴向定位条固定地安装在一个高度定位条的下表面;所述四个箱体导向条两两一组固定地安装在二个高度定位条的两侧伸出端;所述二个高度定位条固定安装在左右两侧手爪连接架凸出端,其中已设置轴向定位条的高度定位条固定安装在左侧的手爪连接架凸出端。
可优选的是,当手爪抓取凸台式轴时,高度定位条的下表面与轴上凸台的上表面接触,实现手爪调姿平台的高度定位;左侧高度定位条上固定连接的轴向定位条与轴上凸台的侧面接触,实现末端夹具的轴向定位;当手爪抓取把手式箱体时两侧箱体导向条与把手式箱体的上表面和侧面接触,实现手爪调姿平台的高度定位、抓手相对箱体把手的高度定位、抓手尖端部相对箱体侧壁的距离定位;集成末端手爪起吊箱体时抓手与箱体把手接触,把手受力翻转,抓手受力在抓手导轨上移动,把手翻转90度,抓手移动到极限位置,实现平稳起吊与搬运箱体;当集成末端手爪起吊箱体完成后抓手与箱体把手脱离接触,把手因重力而实现自动翻转复位,抓手因抓手复位弹簧的弹力而实现自动移动复位,从而所述手爪实现对凸台式轴类与把手式箱体两类零件的抓取。
可优选的是,所述手爪调姿平台还包括:平键锥齿轮、竖直丝杠拨叉轴承盖、花键轴轴承压盖、花键轴轴承座、花键轴轴承盖、竖直丝杠和竖直丝杠轴承盖,所述平键锥齿轮与所述花键锥齿轮构成锥齿轮传动,实现两侧平键锥齿轮随花键轴转动的同步转动;所述平键锥齿轮固定连接在所述竖直丝杠的平键键槽轴端,实现平键锥齿轮与竖直丝杠的同步转动;所述竖直丝杠拨叉轴承盖固定安装手爪连接架上,其上端拨叉状部与花键锥齿轮凹槽部转动连接,实现两侧花键锥齿轮随两侧手爪连接架在手爪连接架导轨上的相对同步运动而在花键轴上的相对同步运动;所述竖直丝杠通过手爪连接架内两个轴承支撑与所述竖直丝杠拨叉轴承盖和所述竖直丝杠轴承盖固定连接在手爪连接架上;所述花键轴轴承座、花键轴轴承压盖和花键轴轴承盖固定支撑花键轴,所述花键轴轴承压盖和花键轴轴承盖固定安装在花键轴轴承座两侧,所述花键轴轴承座固定安装在上平台上。
进一步,所述手爪调姿平台还包括:左旋丝杠螺母、右旋丝杠螺母、双向丝杠轴承盖、双向丝杠支撑座和双向丝杠轴承压盖,所述双向丝杠两侧旋向分别为左旋与右旋,所述左旋丝杠螺母螺旋连接在所述双向丝杠左旋段,所述右旋丝杠螺母螺旋连接在所述双向丝杠右旋段,实现两个丝杠螺母随双向丝杠的转动同步相向或背向移动;所述双向丝杠轴承盖、双向丝杠支撑座和双向丝杠轴承压盖固定支撑双向丝杠,所述双向丝杠轴承盖和双向丝杠轴承压盖固定安装在双向丝杠支撑座两侧,所述双向丝杠支撑座固定安装在上平台上。
可优选的是,所述手爪调姿平台还包括:花键轴电机、花键轴电机电池箱、双向丝杠电机和双向丝杠电机电池箱,所述花键轴电机与花键轴减速器固定连接,所述花键轴电机电池箱固定安装在右侧的手爪连接架上,实现花键轴电机的直流驱动;所述双向丝杠电机与双向丝杠减速器固定连接,所述双向丝杠电机电池箱固定安装在左侧的手爪连接架上,实现双向丝杠电机的直流驱动。
进一步,所述手爪调姿平台的花键轴电机、双向丝杠电机采用直流驱动或者电池供电,便于实现花键轴和双向丝杠的正反转;所述花键轴转动实现左侧的手爪连接架和右侧的手爪连接架上的竖直丝杠的同步转动;所述双向丝杠转动实现左侧的手爪连接架和右侧的手爪连接架在上平台上沿手爪连接架导轨的同步相向或背向运动。
可优选的是,所述吊环移动装置还包括:吊环螺栓、吊环板、辅助垫片和吊环导轨扣件,所述吊环螺栓固定安装在吊环板的上端面;所述吊环板的下端面与所述吊环滑块、导轨钳制器以及辅助垫片固定安装;所述吊环导轨扣件倒扣在吊环导轨两侧,固定安装在手爪调姿平台的上平台上,增强吊环导轨与上平台的连接强度。
由于本发明采用了上述技术方案,本发明具有以下有益效果:
(1)通过设置吊环移动装置保证吊点的位置调节,防止起吊时工件偏转、侧翻。
(2)通过手爪调姿平台设置双向丝杠-丝杠螺母装置,两对手爪间的相对距离便可以进行同步按需调节,保证整体集成末端手爪的对称性。
(3)通过手爪调姿平台设置花键轴-锥齿轮传动-竖直丝杠-丝杠螺母装置,实现两对手爪的同步张开、闭合,保证对工件的同步抓取。
(4)通过设置高度定位条、轴向定位条、箱体导向条,实现集成末端手爪夹取凸台式轴或把手式箱体时的准确定位。
(5)通过设置末端夹具-抓手装置,实现集成末端手爪对具有凸台式轴或者把手式箱体两类零件的吊运,本发明的搬运机器人集成末端手爪具有通过高度集成化的结构设计,实现一套集成末端手爪既能吊运两类不同零件的需求。
附图说明
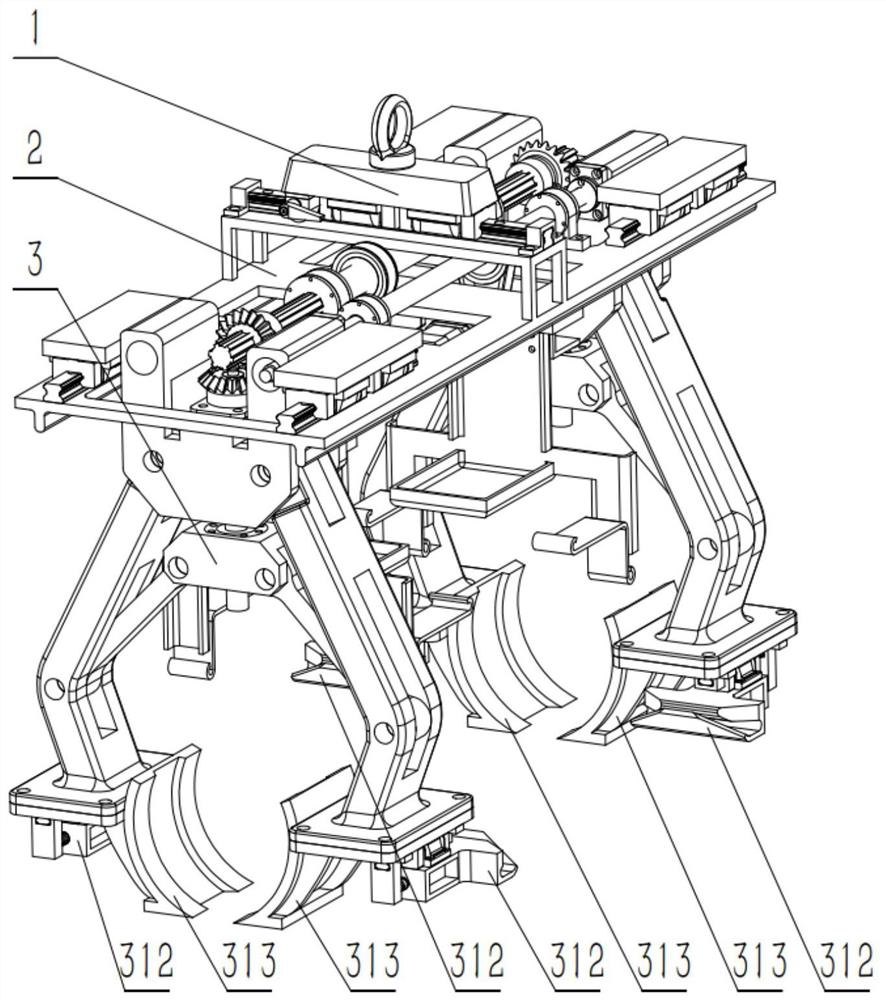
图1为本发明搬运机器人集成末端手爪的整体装配立体结构示意图;
图2为本发明搬运机器人集成末端手爪的吊环移动装置装配立体结构示意图;
图3、图4为本发明的手爪调姿平台装配立体结构局部示意图;
图5为本发明的花键轴总成装配立体结构示意图;
图6为本发明的锥齿轮传动装配立体结构局部示意图;
图7为本发明的双向丝杠总成装配立体结构示意图;
图8为本发明的左侧的手爪装配立体结构示意图;
图9为本发明的右侧的手爪装配立体结构示意图;
图10为本发明的不完全齿轮传动装配立体结构局部示意图;
图11为本发明的抓手装配立体结构局部示意图;
图12为本发明的把手式箱体零件立体结构局部示意图;
图13为本发明的末端抓手抓取箱体把手立体结构局部示意图;
图14为本发明的手爪抓取把手式箱体零件立体结构局部示意图;
图15为本发明的凸台式轴类零件立体结构局部示意图;以及
图16为本发明的手爪抓取凸台式轴类零件立体结构局部示意图。
附图标号:1-吊环移动装置;2-手爪调姿平台;3-手爪;101-吊环螺栓;102-吊环板;103-吊环滑块;104-辅助垫片;105-导轨钳制器;106-吊环导轨;107-吊环导轨扣件;201-上平台;202-竖直丝杠拨叉轴承盖;203-平键锥齿轮;204-花键轴;205-花键锥齿轮;206-左旋丝杠螺母;207-花键轴轴承压盖;208-花键轴轴承座;209-花键轴轴承盖;210-花键轴第二同步轮;211-花键轴同步带;212-花键轴第一同步轮;213-双向丝杠第二同步轮;214-双向丝杠同步带;215-双向丝杠第一同步轮;216-双向丝杠;217-双向丝杠轴承盖;218-双向丝杠支撑座;219-双向丝杠轴承压盖;220-右旋丝杠螺母;221-手爪连接架;222-手爪连接架滑块;223-手爪连接架导轨;224-竖直丝杠;225-竖直丝杠轴承盖;226-花键轴电机电池箱;227-花键轴电机;228-花键轴减速器;229-双向丝杠减速器;230-双向丝杠电机;231-双向丝杠电机电池箱;301-第一缺齿齿轮;302-第二缺齿齿轮;303-第一手爪连杆;304-竖直丝杠螺母;305-连杆滑块;306-小连杆;307-抓手导轨扣件;308-抓手滑块;309-抓手导轨;310-抓手极限卡位;311-抓手复位弹簧;312-抓手;313-末端夹具;314-第二手爪连杆;315-轴向定位条;316-箱体导向条;317-高度定位条;401-把手式箱体;402-把手;501-凸台式轴;502-凸台;503-轴肩;
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。需要注意的为,除非另有说明,本申请使用的技术术语或者科学术语应当为本发明所属领域技术人员所理解的通常意义。例如本发明所用的前、后、左和右等术语仅仅是示例性质的,是为了描述方便使用的用语。
下面通过实施例,并结合附图,对本发明的技术方案作进一步具体的说明。
如图1-图16所示,本发明的搬运机器人集成末端手爪,包括吊环移动装置1、手爪调姿平台2和手爪3,吊环移动装置1固定安装在手爪调姿平台2的上平台201上,手爪3作为一个集成手爪,通过第一手爪连杆303、第二手爪连杆314与手爪调姿平台2上的手爪连接架221转动连接,能够实现沿着横向对凸台式轴501的抓取和搬运,以及沿着纵向对把手式箱体401的抓取和搬运。
具体的,如图2所示,吊环移动装置包括一个吊环螺栓101、一个吊环板102、二个吊环滑块103、一个辅助垫片104、一个导轨钳制器105、一个吊环导轨106和二个吊环导轨扣件107,吊环移动装置1实现了在起吊凸台式轴类零件或者把手式箱体类零件等不同工件时吊点位置的移动调整。吊环螺栓101固定安装在吊环板102上端面;吊环板102下端面固定安装二个吊环滑块103、一个辅助垫片104和一个导轨钳制器105;吊环导轨106固定安装在上平台201上;二个吊环导轨扣件107倒扣在吊环导轨106上,且固定安装在上平台201上,从而增强吊环导轨106与上平台201的连接强度;二个吊环滑块103和导轨钳制器105滑动地安装在吊环导轨106上,打开导轨钳制器105时,可以实现吊环滑块103在吊环导轨106上的移动,闭合导轨钳制器105时,能实现吊环滑块103在吊环导轨106上的锁紧。
如图3-图7所示,手爪调姿平台2包括一个上平台201、二个竖直丝杠拨叉轴承盖202、二个平键锥齿轮203、一个花键轴204、二个花键锥齿轮205、一个左旋丝杠螺母206、二个花键轴轴承压盖207、二个花键轴轴承座208、二个花键轴轴承盖209、一个花键轴第二同步轮210、一条花键轴同步带211、一个花键轴第一同步轮212、一个双向丝杠第二同步轮213、一条双向丝杠同步带214、一个双向丝杠第一同步轮215、一个双向丝杠216、二个双向丝杠轴承盖217、二个双向丝杠支撑座218、二个双向丝杠轴承压盖219、一个右旋丝杠螺母220、二个手爪连接架221、八个手爪连接架滑块222、四条手爪连接架导轨223、二个竖直丝杠224、二个竖直丝杠轴承盖225、一个花键轴电机电池箱226、一个花键轴电机227、一个花键轴减速器228、一个双向丝杠减速器229、一个双向丝杠电机230和一个双向丝杠电机电池箱231。
上平台201的结构形状是对称的,上平台201的凸出端上表面与吊环导轨106和吊环导轨扣件107固定安装;花键轴减速器228固定安装在上平台201上,并且与花键轴电机227固定连接;花键轴电机电池箱226固定安装在右侧的手爪连接架221上,通过电线连接对花键轴电机227提供动力;花键轴第一同步轮212与花键轴减速器228的输出轴固定连接,花键轴同步带211分别与花键轴第一同步轮212和花键轴第二同步轮210啮合连接,花键轴第二同步轮210与花键轴204固定连接,通过驱动花键轴电机227转动,经过花键轴减速器228、花键轴第一同步轮212、花键轴同步带211、花键轴第二同步轮210的传动实现花键轴204的转动;花键轴204通过二个花键轴轴承座208、二个花键轴轴承压盖207、二个花键轴轴承盖209固定支撑安装在上平台201上,其两侧的花键轴端上分别固定连接花键锥齿轮205,花键锥齿轮205与平键锥齿轮203组成锥齿轮传动,实现二个平键锥齿轮203随花键轴204转动的同步转动;双向丝杠减速器229固定安装在上平台201上,其与双向丝杠电机230固定连接;双向丝杠电机电池箱231固定安装在左侧的手爪连接架221上,通过电线连接对双向丝杠电机230提供动力;双向丝杠第一同步轮215与双向丝杠减速器229输出轴固定连接,双向丝杠同步带214分别与双向丝杠第一同步轮215和双向丝杠第二同步轮213啮合连接,双向丝杠第二同步轮213与双向丝杠216固定连接,通过驱动双向丝杠电机230转动,经过双向丝杠减速器229、双向丝杠第一同步轮215、双向丝杠同步带214、双向丝杠第二同步轮213的传动实现双向丝杠216的转动;双向丝杠216通过二个双向丝杠轴承座218、二个双向丝杠轴承压盖219、二个双向丝杠轴承盖217固定支撑安装在上平台201上,其两侧分别为旋向左旋的左旋段与旋向右旋的右旋段,左旋段与左旋丝杠螺母206螺旋连接,右旋段与右旋丝杠螺母220螺旋连接,实现两个丝杠螺母随双向丝杠216的转动同步相向或背向移动;四条手爪连接架导轨223分别固定安装在上平台201上,且对称分布;八个手爪连接架滑块222两两滑动地安装在四条手爪连接架导轨223上,两两一组的手爪连接架滑块222分别与二个手爪连接架221的两侧下表面固定安装;二个手爪连接架221分别布置在上平台201的两侧,位于左侧的左旋丝杠螺母206固定安装在左侧的手爪连接架221上,位于右侧的右旋丝杠螺母220固定安装在右侧的手爪连接架221上,通过双向丝杠216转动和手爪连接架滑块222实现两侧手爪连接架221在手爪连接架导轨223上的同步相向或背向移动;二个竖直丝杠224分别通过手爪连接架内两个轴承支撑与竖直丝杠拨叉轴承座202、竖直丝杠轴承座225固定安装在两侧手爪连接架221上,其上端平键的键槽轴端通过平键与平键锥齿轮203固定连接,实现平键锥齿轮203与竖直丝杠224的同步转动;二个竖直丝杠拨叉轴承盖202分别固定安装在两侧手爪连接架221上,其上端拨叉状部与花键锥齿轮205凹槽部转动连接,实现两侧花键锥齿轮205随两侧手爪连接架221在上平台201上手爪连接架导轨223上的相对同步运动而在花键轴204上的相对同步运动。
进一步地,花键轴电机电池箱226直流驱动花键轴电机227转动实现左右两侧手爪连接架221上竖直丝杠224的同步转动;双向丝杠电机电池箱231驱动双向丝杠电机230转动实现左右两侧手爪连接架221在上平台201上沿手爪连接架导轨223的同步相向或背向运动。
如图8-图11所示,手爪3包括二个第一缺齿齿轮301、二个第二缺齿齿轮302、二个第一手爪连杆303、二个竖直丝杠螺母304、二个连杆滑块305、四个小连杆306、四个抓手导轨扣件307、四个抓手滑块308、四个抓手导轨309、四个抓手极限卡位310、四个抓手复位弹簧311、四个抓手312、四个末端夹具313、二个第二手爪连杆314、一个轴向定位条315、四个箱体导向条316和二个高度定位条317;第一缺齿齿轮301固定安装在第一手爪连杆303上,第二缺齿齿轮302固定安装在第二手爪连杆314上,第一缺齿齿轮301与第二缺齿齿轮302组成缺齿齿轮啮合传动,实现第一手爪连杆303与第二手爪连杆314的同步开合;二个第一手爪连杆303与二个第二手爪连杆314组合成两对手爪连杆,分别转动连接在左右两侧的手爪连接架221上;二个竖直丝杠螺母304分别转动连接在两侧手爪连接架内的竖直丝杠224上,其固定安装在连杆滑块305上,实现两侧连杆滑块305随两个竖直丝杠224的同步转动而同步直线滑动;小连杆306的第一端转动连接在连杆滑块305上,小连杆306的第二端转动连接在手爪连杆上,四个小连杆306两两一组转动连接在两侧连杆滑块305与两对手爪连杆上;四个末端夹具313两两一组,且圆弧段部相向分布,分别固定安装在两侧的两对手爪连杆上;四个抓手312,其两两一组且尖端部相向分布,其上表面分别与四个抓手滑块308固定安装,其后端方形部连接四个抓手复位弹簧311,实现抓手312工作时受弹簧力的位置调整与自动复位;四个抓手滑块308分别滑动地安装在四个抓手导轨309上,其上端面固定安装在四个抓手312上;四个抓手导轨309固定安装在四个末端夹具313圆弧段部后侧凸出平台的下表面;四个抓手导轨扣件307沿着抓手尖端部方向倒扣在四个抓手导轨309的前端,其固定安装在四个末端夹具313上,增强抓手导轨309与末端夹具313的连接强度;四个抓手极限卡位310沿着抓手后端方形部方向倒扣在四个抓手导轨309的后端,其固定安装在四个末端夹具313上,实现对抓手312在抓手导轨309上移动的极限位置限制,其凸出端固定连接抓手复位弹簧311。一个轴向定位条315焊接安装在一个高度定位条317的下表面;四个箱体导向条316两两一组地固定安装在二个高度定位条317的两侧伸出端;高度定位条317固定安装在左右两侧手爪连接架221凸出端,其中已焊接轴向定位条315的高度定位条317固定安装在左侧的手爪连接架221凸出端。
如图12-图14所示,本发明搬运机器人集成末端手爪搬运的把手式箱体401为非对称、不规则结构零件,其上对称分布四个可翻转把手402;在搬运把手式箱体401的过程中,当手爪3抓取把手式箱体401时,两侧箱体导向条316与把手式箱体401的上表面和侧面接触,实现手爪调姿平台2的高度定位、抓手312相对箱体把手402的高度定位、抓手312尖端部相对把手式箱体401侧壁的距离定位;集成末端手爪起吊把手式箱体401时,抓手312与箱体把手402接触,把手402受力翻转,抓手312受力在抓手导轨309上移动,把手402翻转90度,抓手312移动到极限位置,从而实现平稳起吊与搬运把手式箱体401;当集成末端手爪搬运把手式箱体401完成后,抓手312与把手402脱离接触,把手402因重力而实现自动翻转复位,抓手312因抓手复位弹簧311的弹力而实现自动移动复位。
如图15-图16所示,本发明搬运机器人集成末端手爪搬运的凸台式轴501为轴上有多段凸台502以及轴肩503的结构,其质心位于两个轴肩503的对称位置;在搬运凸台式轴501的过程中,当手爪3抓取凸台式轴501时,高度定位条317的下表面与轴上凸台502的上表面接触,实现手爪调姿平台2的高度定位;左侧高度定位条317上焊接的轴向定位条315与轴上凸台502的侧面接触,末端夹具313凹槽部与轴肩503等宽,从而实现手爪调姿平台2的轴向定位;末端夹具313圆弧段部分别在轴肩503左右两侧的轴外表面处夹持住凸台式轴501,实现对凸台式轴501的安全平稳起吊搬运。
以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应所述以权利要求的保护范围为准。
- 搬运机器人集成末端手爪
- 一种搬运机器人集成末端手爪