利用公共参考信号和误差信号的并发FXLMS系统
文献发布时间:2023-06-19 09:47:53
相关申请的交叉引用
本申请要求2018年6月14日提交的美国临时申请序列号62/685,025的权益,所述临时申请的公开内容据此以引用的方式整体并入本文。
技术领域
本文公开了利用公共参考信号和误差信号的并发fxLMS系统。
背景技术
车辆在行驶时通常会产生空气传播和结构传播的噪声。为了消除噪声,主动噪声消除通常用于通过发出具有与噪声的振幅类似的振幅但具有反相的声波来抵消此类噪声。车辆内的主动噪声消除系统可旨在减少发动机噪声以及道路噪声。
发明内容
一种用于车辆音频系统的噪声消除系统可包括:至少一个输入传感器,所述至少一个输入传感器布置在车辆的发动机上,所述至少一个输入传感器被配置来提供指示在所述发动机处检测到的加速度或振动的输入信号;以及处理器。所述处理器可被编程来:接收参考信号;将至少一个阶次跟踪应用于参考信号;基于所述加速度或振动产生误差信号;以及将至少一个其他阶次跟踪滤波器应用于所述误差信号以提供所述输入信号的发动机阶次消除。
一种用于车辆音频系统内的发动机阶次消除的噪声消除方法可包括:接收参考信号;将至少一个阶次跟踪应用于参考信号;基于所述加速度或振动产生误差信号;以及将至少一个其他阶次跟踪滤波器应用于所述误差信号以提供发动机阶次消除。
一种用于车辆音频系统的噪声消除系统可包括:至少一个加速度计,所述至少一个加速度计布置在车辆的发动机上,所述至少一个加速度计被配置来提供指示在所述发动机处检测到的加速度或振动的参考信号;至少一个输入传感器,所述至少一个输入传感器被配置来传输窄带输入信号和宽带输入信号;以及处理器。所述处理器可被编程来:接收所述参考信号;接收所述窄带输入信号和所述宽带输入信号;将至少一个阶次跟踪应用于参考信号;将次级路径应用于所述输入信号以产生抗噪声信号;将在所述次级路径上广播的所述抗噪声信号和初级噪声信号相加以产生误差信号;以及将至少一个其他阶次跟踪滤波器应用于所述误差信号以提供所述输入信号的发动机阶次消除。
附图说明
在所附权利要求中特定地指出了本公开的实施方案。然而,通过结合附图参考以下详细描述,各种实施方案的其他特征将变得更加明显并且将得到最好的理解,在附图中:
图1示出根据一个实施方案的示例性主动噪声消除系统;
图2示出图1的系统的示例性窄带和宽带滤波器系统;并且
图3示出主动噪声消除系统的示例性过程。
具体实施方式
按照要求,本文公开了本发明的详细实施方案;然而,应理解,所公开的实施方案仅仅是可以各种替代形式体现的本发明的示例。图未必按比例绘制;一些特征可能被放大或最小化以示出特定部件的细节。因此,本文中公开的特定结构细节和功能细节不应被解释为是限制性的,而是仅仅作为教导本领域技术人员以不同方式运用本发明的代表性基础。
本文公开了一种使用利用公共参考信号和误差信号的并发FxLMS算法的主动噪声消除(ANC)系统。FxLMS可用于消除结构传播的噪声,其中参考信号由放置在底盘上的加速度计提供(例如,道路噪声消除或RNC)。当前的发动机阶次消除(EOC)和RNC系统具有单独的参考信号。历史上,用于EOC的参考信号可经由控制器局域网(CAN)消息或模拟信号递送,以表示每分钟发动机转速(RPM)。对于RNC,可从底盘上的加速度计获取参考信号。然而,某些操作条件变得越来越复杂,使得难以经由CAN递送或触发用于EOC的参考信号。
例如,车辆可在牵引模式下操作。在牵引期间,发动机上增加的负载可能会导致加速度计可容易识别的振动增加。然而,ANC系统无法识别车辆当前处于哪种模式。本文公开的系统可将加速度计放置在发动机架或另一动力总成架上。此加速度计可用于EOC和RNC两者,其中对于加速度计信号具有另外的阶次跟踪滤波器。由加速度计辨识的振动改变可指示车辆模式(例如,牵引模式)的改变。与使用发动机RPM时提供的典型的单位振幅符号波相反,加速度计信号还可提供变化的振幅信息。
通过使用来自放置在发动机架上的加速度计的信号,所述信号可提高EOC系统的收敛性。先前,EOC系统在从滤波器的幅度部分中的单位振幅开始的同时必须搜索正确的幅度和相位信息。因为对于EOC系统和RNC系统两者,所公开的系统仅需要一组参考传感器和一组误差传感器,所以材料的构造和总成本较小。因此,降低了系统复杂度。可从参考信号中提取宽带信号和窄带信号。接着,在使用公共输出传感器和两组自适应滤波器的情况下,系统可产生两组抗噪声信号(EOC和RNC)。
还改善了系统的稳定性。在于轻负载条件下维持稳定性的同时在高负载条件下进行积极调谐,或反之,这对于利用转速参考信号的经典EOC算法是一个历史问题。利用加速度计作为用于EOC的参考信号解决了这个问题。此外,从加速度计接收的参考信号的延迟小于CAN消息。因此,改善了EOC性能。
图1示出示例性主动噪声消除系统100,其具有控制器105、至少一个输入传感器110和至少一个换能器140。控制器105可以是包括硬件和软件部件两者的组合的独立装置,并且可包括被配置来分析和处理音频信号的处理器。具体地,控制器105可被配置来基于从输入传感器110接收的数据在车辆内执行用于道路噪声消除(RNC)以及主动道路噪声消除(ARNC)的宽带噪声消除和窄带噪声消除。控制器105可包括用于实现ARNC的各种系统和部件,诸如窄带滤波器系统132。
输入传感器110可被配置来将输入信号提供给控制器105。输入传感器110可包括被配置来检测运动或加速度并将加速度计信号提供给控制器105的加速度计112。加速度信号可指示车辆加速度、发动机加速度、车轮加速度等。输入传感器110还可包括被配置来检测噪声的麦克风和/或声强传感器。输入传感器110可检测窄带噪声和宽带噪声两者,如关于图2更详细地描述。输入传感器110还可检测多组噪声,包括第一窄带噪声信号集和第二窄带噪声信号集。因此,单个传感器可从公共参考信号检测窄带信号和宽带信号两者。
加速度计112可布置在车辆的动力总成架诸如发动机架上。此加速度计可与输入传感器110分离并且可被配置来检测发动机处的加速度或振动。通过使用某些阶次跟踪滤波器(如关于图2所描述),加速度计可产生识别振动改变的发动机信号,因此使控制器105确定车辆处于不同的操作模式。代替CAN消息或模拟测速信号,加速度计112可用作用于EOC的参考信号。加速度计112也可代替布置在用于RNC的底盘上的传统加速度计。
可根据参考信号的振幅来确定模式。在一些情形中,在振幅超出加速度计112的可检测阈值的情况下,可包括检测器。例如,与非牵引模式相比,当在牵引中时,对应于初级发动机阶次的频率(或其一些谐波)将可能更高。
换能器140可被配置来在输出通道(未标记)处可听地产生由控制器105提供的音频信号。在一个实例中,换能器140可包括在机动车辆中。车辆可包括贯穿车辆的各种位置(诸如右前、左前、右后和左后)布置的多个换能器140。每个换能器140处的音频输出可由控制器105控制并且可经受噪声消除以及影响其输出的其他参数。换能器140可提供噪声消除信号以帮助ARNC提高车辆内的声音质量。
ARNC系统100可包括布置在次级路径176上的反馈或输出传感器145,诸如麦克风,并且可从换能器140接收音频信号。反馈传感器145可以是被配置来将麦克风输出信号传输到控制器105的麦克风。反馈传感器还可从车辆接收不期望的噪声,诸如道路噪声和发动机噪声。输出传感器145可在初级路径处提供误差信号。
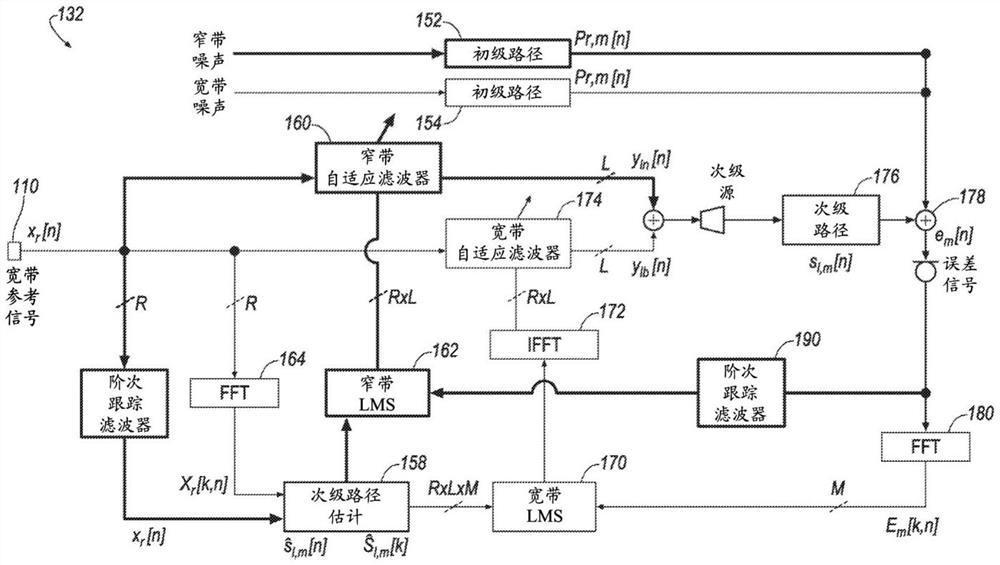
图2示出图1的更详细的系统100,并且包括ARNC系统100的示例性滤波器系统132。滤波器系统132可包括供应与时间有关的初级窄带传播路径P
系统132可接收宽带参考信号x
第一阶次跟踪滤波器块167可布置在窄带自适应滤波器160与次级路径估计块158之间。第一阶次跟踪滤波器块167可将宽带参考信号x
宽带参考信号x
次级路径估计块158可针对时域和频域中的每一者估计次级路径,并且确定频域中的估计次级路径
R是参考信号的总维数,
L是次级源的总维数,且
M是误差信号的总维数。
宽带最小均方(LMS)块170可以是被配置来应用误差信号的最小均方的滤波器系数的自适应滤波器。接着可在IFFT块172处将逆FFT应用于此信号。接着可将RxL矩阵供应给宽带自适应滤波器174。
次级路径估计块158还可将RxLxM矩阵提供给窄带最小均方(LMS)块162,所述窄带最小均方块162可以是被配置来应用误差信号的最小均方的滤波器系数的自适应滤波器。窄带最小均方块162可将RxL矩阵提供给窄带自适应滤波器160。
宽带自适应滤波器174可提供宽带次级源信号Y
在求和法178处,经由次级路径s
接着可将阶次跟踪滤波器块190应用于误差信号e
图3示出用于主动噪声消除系统的示例性过程300。过程300可在框305处开始,在框305处,控制器105接收输入信号。
在框310处,控制器105可将自适应滤波器应用于前向路径中的宽带参考信号x
在框315处,控制器105可将阶次跟踪滤波器167应用于输入信号中的一个或多个。
在框320处,控制器105可应用表示系统的电声传递函数的次级路径,类似于图2的次级路径估计框176。
在框325处,控制器105可将次级路径估计(例如,第二路径估计块158)应用于滤波后的输入信号。
在框330处,控制器105可将抗噪声信号与初级噪声信号相加以产生误差信号。在此实例中,将在次级路径s
在框335处,控制器105可将第二阶次跟踪滤波器190应用于误差信号e
在框340处,控制器105可进行来自框325的二次估计的输出的最小均方(LMS)。
在框350处,控制器105可在块172处进行信号的IFFT。
在框355处,控制器105可基于过程300用滤波器更新系统。
过程300接着可结束。
本公开的实施方案通常提供多个电路、电气装置和至少一个控制器。对电路、至少一个控制器和其他电气装置以及由它们各自提供的功能的所有引用不旨在局限于仅包含本文中说明和描述的内容。虽然可将特定标签分配给所公开的各种一个或多个电路、一个或多个控制器和其他电气装置,但是此类标签并不旨在限制各种一个或多个电路、一个或多个控制器和其他电气装置的操作范围。此类一个或多个电路、一个或多个控制器和其他电气装置可基于期望的电气实现方式的特定类型以任何方式彼此组合和/或分离。
应认识到,如本文所公开的任何控制器可包括任何数量的微处理器、集成电路、存储装置(例如,闪存、随机存取存储器(RAM)、只读存储器(ROM)、电可编程只读存储器(EPROM)、电可擦除可编程只读存储器(EEPROM)或它们的其他合适的变体)和软件,它们相互协作以执行本文所公开的一个或多个操作。另外,如所公开的任何控制器利用任何一个或多个微处理器来执行体现在非暂时性计算机可读介质中的计算机程序,所述计算机程序被编程来执行如所公开的任何数量的功能。此外,如本文所提供的任何控制器包括外壳以及定位在外壳内的各种数量的微处理器、集成电路和存储装置(例如,闪存、随机存取存储器(RAM)、只读存储器(ROM)、电可编程只读存储器(EPROM)、电可擦除可编程只读存储器(EEPROM))。如所公开的一个或多个控制器还包括基于硬件的输入和输出,所述基于硬件的输入和输出用于分别从如本文所论述的其他基于硬件的装置接收数据和向所述其他基于硬件的装置传输数据。
关于本文所述的过程、系统、方法、启发内容等,应理解,尽管此类过程的步骤等已被描述为根据某一有序序列发生,但此类过程可以不同于本文所述的次序的次序所执行的所述步骤进行实践。应进一步理解,某些步骤可被同时执行、可添加其他步骤或可省略本文所述的某些步骤。换句话说,本文所述的过程是出于说明某些实施方案的目的而提供的,并且绝不应当被解释为以便限制权利要求。
虽然以上描述示例性实施方案,但是并不旨在这些实施方案描述了本发明的所有可能形式。相反,在说明书中使用的措词是用于描述而非限制,并且应理解,可在不脱离本发明的精神和范围的情况下做出各种改变。另外,各种实现实施方案的特征可加以组合以形成本发明的另外的实施方案。
- 利用公共参考信号和误差信号的并发FXLMS系统
- 利用芯片上生成的精密参考信号的数据转换器系统误差校准