用于机电制动器的开环控制
文献发布时间:2023-06-19 09:52:39
技术领域
实施例涉及用于在闭环控制系统失效时向机电制动器提供有限的开环控制的系统和方法。
背景技术
在现代制动系统中,真空制动器被机电制动器和无真空制动器(例如,由RobertBosch GmbH创造的iBooster制动器)所取代。机电制动器和无真空制动器在应用制动器期间只使用电能,这节省了燃料并减少了车辆的CO
基于传感器输入(例如,制动踏板行程传感器、永磁同步电机转子位置传感器、永磁同步电机电流传感器等)来控制机电制动器。控制机电制动器的电子控制器从传感器接收反馈以便正确地操作机电制动器。如果电子控制器未从传感器接收到反馈或接收到错误信号,则可能不正确地控制或根本未启动机电制动器。
发明内容
因此,需要一种系统以在闭环控制系统中的传感器失效的情况下提供对机电制动器的有限的开环控制。
一个实施例提供了一种在闭环马达控制失效时实施用于机电制动器的开环马达控制的系统。该系统包括:机电制动机构,其包括永磁同步电机;转子位置传感器,其被构造成检测永磁同步电机的转子的位置;马达电流传感器;以及电子控制器,其被构造成:确定转子位置传感器和马达电流传感器中的至少一者是否不正确地操作;生成用于控制永磁同步电机的控制信号;以及使用所生成的控制信号来启动永磁同步电机以生成定子磁场,从而操作永磁同步电机的转子。
一个实施例提供了一种用于在闭环马达控制失效时提供用于机电制动器的开环马达控制的方法。该方法包括:利用电子控制器确定转子位置传感器或电流传感器是否不正确地操作;利用电子控制器生成用于控制永磁同步电机的所生成的控制信号;以及利用电子控制器使用所生成的控制信号来启动永磁同步电机以生成定子磁场,从而操作机电制动器的永磁同步电机的转子。
通过考虑详细描述和附图,其他方面、特征和实施例将变得明白。
附图说明
图1图示了包括根据一个实施例的制动系统的车辆。
图2图示了根据一个实施例的机电制动机构。
图3图示了根据一个实施例的电子控制器。
图4图示了根据一个实施例的控制机电制动机构的闭环方法。
图5图示了根据一个实施例的控制机电制动机构的开环方法。
具体实施方式
在详细解释任何实施例之前,将理解,本公开并不意图于在其应用方面限于在以下描述中阐述或在以下附图中图示的部件的构造和布置的细节。实施例能够具有其他构型并且能够以各种方式来实践或实施。
可使用多个基于硬件和软件的装置以及多个不同的结构部件来实施各种实施例。另外,实施例可包括硬件、软件和电子部件或模块,出于讨论的目的,所述电子部件或模块可被图示和描述为好像大多数部件仅在硬件中实施。然而,本领域普通技术人员基于对该详细描述的阅读将认识到,在至少一个实施例中,本发明的基于电子的方面可在可由一个或多个处理器执行的软件(例如,存储在非暂时性计算机可读介质上)中实施。例如,说明书中描述的“控制单元”和“控制器”可以包括一个或多个电子处理器、包括非暂时性计算机可读介质的一个或多个存储器模块、一个或多个输入/输出接口、一个或多个专用集成电路(ASIC)、以及连接各种部件的各种连接件(例如,系统总线)。
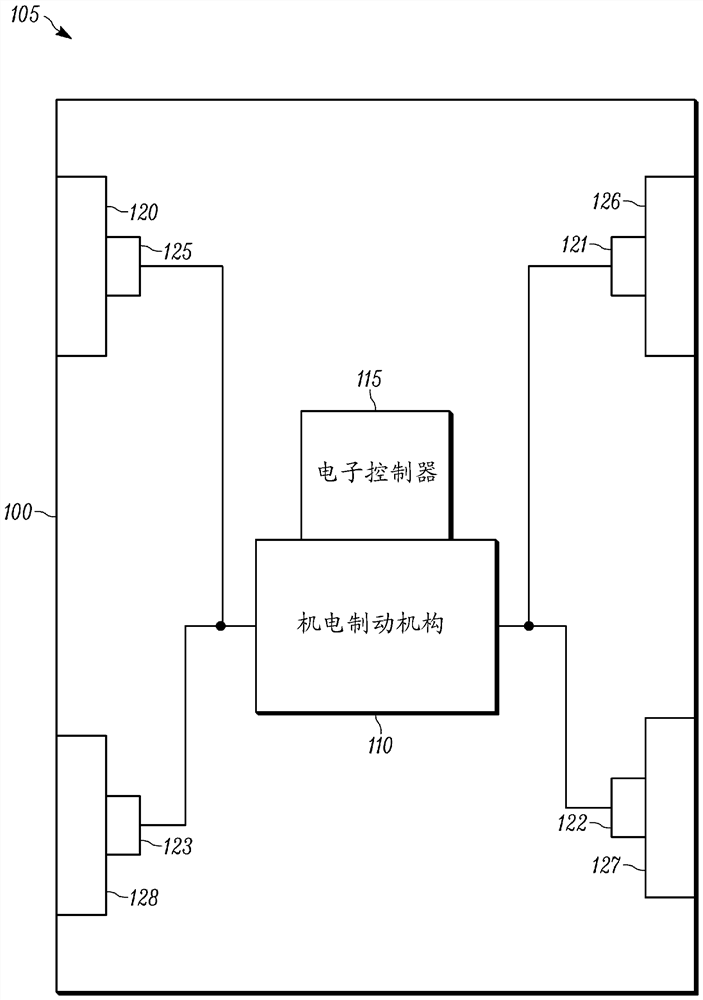
图1图示了包括制动系统105的车辆100。制动系统105包括机电制动机构110和电子控制器115。机电制动机构110通信地联接到电子控制器115并液压地联接到制动器120-123,所述制动器被构造成应用于车轮125-128。
在由图1所图示的实施例中,车辆100是四轮车辆,诸如汽车、公共汽车等。然而,将理解,制动系统105可在具有更多或更少车轮的其他车辆中(例如,在摩托车中)实施。
在图2中图示了机电制动机构110的示例。
机电制动机构110包括输入杆205、行程传感器210、永磁同步电机215、齿轮系统220、助推(boost)元件225和主缸230。
输入杆205从车辆100的操作者接收输入以致动机电制动机构110的其余部分。例如,输入杆205可连接到制动踏板,车辆100的操作者踩下该制动踏板以便制动车辆100。输入杆205响应于用户输入而移动。在自动驾驶车辆中,输入杆205可在没有来自用户的输入的情况下(例如,从独立的电子控制器接收制动请求)移动。取而代之的是,输入杆205可通过马达移动,或者可根本不移动。如果输入杆205根本不移动,则电子控制器115可从独立的电子控制器接收制动请求,以便致动机电制动机构110。
行程传感器210检测输入杆205的移动。例如,行程传感器210检测输入杆205从起始位置移动多远。行程传感器210通信地联接到电子控制器115,并且将由输入杆205行进的距离发送到电子控制器115。
电子控制器115确定用于永磁同步电机215的控制信号(例如,基于从行程传感器210接收的由输入杆205行进的距离来确定永磁同步电机215的扭矩)。永磁同步电机215被构造成使齿轮系统220移动。齿轮系统220将永磁同步电机215的扭矩转换成用于助推元件225的助推动力。然后,助推元件225将基于助推动力的力施加到主缸230,在那儿所施加的力被转换成液压压力以致动制动器120-123。
在用于机电制动机构110的闭环控制系统中,机电制动机构110可包括检测永磁同步电机215的转子的位置的传感器(转子位置传感器)和检测永磁同步电机的电流的传感器(马达电流传感器)。这些传感器用作电子控制器115的反馈机构,如下文所描述的。
在一些实施例中,主缸230还包括主缸压力传感器。主缸压力传感器检测主缸中的液压压力。主缸压力传感器可通信地联接到电子控制器115,并且还可被构造成将主缸230的液压压力发送到电子控制器115。
根据一个实施例,在图3中图示了电子控制器115。电子控制器115包括输入-输出接口310、电子处理器320(诸如,可编程电子微处理器、微控制器和类似装置)以及存储器330(例如,非暂时性机器可读存储器)。电子处理器320通信地联接到存储器330和输入-输出接口310。电子处理器320在与存储器330和输入-输出接口310协调的情况下被构造成除了别的以外还实施本文中所描述的方法。
将理解,电子控制器115可包括多个电动部件和电子部件,这些部件向电子控制器115内的在本文中未描述的部件和模块提供功率、操作控制和保护。
电子控制器115可在若干个独立的控制器(例如,可编程电子控制单元)中实施,每个控制器被构造成执行具体的功能或子功能。附加地,电子控制器115可包含子模块,这些子模块包括附加的电子处理器、存储器或专用集成电路(ASIC)以用于下文列出的处理输入/输出功能、信号的处理以及方法的应用。在其他实施例中,电子控制器115包括附加的、更少的或不同的部件。
图4图示了用于机电制动机构110的闭环控制系统400。使用电子控制器115来实施闭环控制系统400。例如,高阶闭环控制器405可被实施为电子控制器115内的子控制器或微处理器,或者被实施为存储在存储器330中的一组软件指令。高阶闭环控制器405从行程传感器210接收指示输入杆205已行进多远的信号。基于所行进的距离,高阶闭环控制器405确定永磁同步电机215的目标马达速度(“Target Motor Speed”)。
高阶闭环控制器405将目标马达速度发送到闭环马达速度控制器410。像高阶闭环控制器405一样,闭环马达速度控制器410可被实施为电子控制器115中的子控制器或微处理器,或者被实施为存储在存储器330中的软件指令。闭环马达速度控制器410接收目标马达速度,并基于目标马达速度来确定目标马达扭矩。
闭环马达速度控制器410将目标马达扭矩(“Target Motor Torque”)发送到场定向控制器415(以与高阶闭环控制器405类似的方式实施)。场定向控制器415依赖于来自电源的电压测量值416、来自马达电流传感器的马达电流测量值417、以及来自转子位置传感器的转子位置测量值418。场定向控制器415基于目标马达扭矩、电压测量值416、马达电流测量值417和转子位置测量值418来输出占空比,该占空比指示永磁同步电机215的三相中的每个相的目标电压。三相中的每个相的占空比产生定子电压空间矢量,该定子电压空间矢量确定马达扭矩和转子的旋转。
定子电压空间矢量被发送到永磁同步电机215,永磁同步电机215将马达扭矩施加到齿轮系统220,齿轮系统220继而在助推元件225处产生输出力和输出冲程420。该输出力和输出冲程420被施加到主缸230,从而增加了主缸230中的液压压力并将液压压力施加到制动器120-123(在框425处)。
在一些实施例中,所产生的液压压力由主缸压力传感器测量作为主缸液压压力测量值(430),该主缸液压压力测量值然后由高阶闭环控制器405用作反馈。例如,高阶闭环控制器405可基于目标马达速度来确定期望的液压压力。然后,高阶闭环控制器405将接收到的主缸液压压力测量值430与期望的液压压力进行比较,以确定机电制动机构110的部件是否正确地操作。
闭环马达速度控制器410还接收转子位置测量值418。这允许进行更准确的目标马达扭矩计算。
场定向控制器415依赖于来自各个传感器(场定向控制器415从这些传感器接收信号)的准确测量值(诸如,转子位置测量值418),以便施加从制动请求(通过输入杆205或另一个制动请求)接收的正确量的制动力。例如,如果马达电流传感器不恰当地工作或者如果转子位置传感器不恰当地工作,则场定向控制器415将不能向永磁同步电机215提供正确的占空比。这将引起不正确量的制动力被施加到制动器120-123。
为了在一个或多个传感器失效的情况下提供冗余和失效保护系统,需要开环控制系统500。在图5中图示了这种开环控制系统500。
电子控制器115被构造成确定一个或多个传感器(特别地,马达电流传感器和转子位置传感器)是否不正确地工作。例如,电子控制器115被构造成确定一个或多个传感器何时不向电子控制器115发送信号。在另一个示例中,电子控制器115可能正在从一个或多个传感器接收反馈,但是所述一个或多个传感器正在将数据发送回到电子控制器115,当与期望的值(诸如,主缸230中的压力值)进行比较时,该数据被确定为不正确的值。
开环控制系统500仍然利用高阶闭环控制器405来确定永磁同步电机215的目标马达速度,如上文所描述的。然而,由于一个或多个传感器(诸如,马达电流传感器或转子位置传感器)不正确地工作,因此闭环马达速度控制器410和场定向控制器415也许不能正确地操作。
在闭环马达速度控制器410和/或场定向控制器415不正确地操作的情况下,电子控制器115确定目标马达速度(“Target Motor Speed”)(使用高阶闭环控制器405)并确定目标马达速度梯度限制(框505)。因为电子控制器115没有从马达电流传感器或转子位置传感器接收到反馈,因此电子控制器115确定永磁同步电机215的最大速度限制和最大可允许的速度变化量。如下文所描述的,如果目标马达速度太高(例如,超出永磁同步电机215的定子磁场的操作范围),则永磁同步电机215的转子可能与永磁同步电机215的定子磁场异步旋转,从而引起不正确的制动行为。
为了在马达电流传感器和/或转子位置传感器不工作时操作永磁同步电机215,电子控制器115生成控制信号来控制永磁同步电机215以产生定子磁场。定子磁场以指定的角速度(由电子控制器115指定)产生。
当由永磁同步电机215产生时,定子磁场引起永磁同步电机215的转子旋转。定子磁场以指定的角速度旋转,并且永磁同步电机215的转子与定子磁场同步旋转。当永磁同步电机215生成定子磁场时,电子控制器115将永磁同步电机215的转子操作为步进马达。对于定子磁场的旋转场轴线的每个阶梯式变化,永磁同步电机215的转子都将位置改变为旋转场轴线的位置。
由于惯性力和摩擦力,永磁同步电机215的转子可在跟随旋转场轴线的位置方面被延迟。为了防止或最小化该延迟,需要通过目标马达速度梯度限制505来限制定子磁场的角速度的变化率(定子磁场的频率)。
当向主缸230施加液压压力(使用齿轮系统220和助推元件225)时,永磁同步电机215面临负载扭矩。随着负载扭矩的增加,永磁同步电机215的转子可开始滞后于旋转场轴线,从而以一定角度跟随旋转场轴线。例如,当永磁同步电机215的转子仍然与旋转场轴线同步旋转时,转子的位置在与定子磁场相同的角速度下以一定角度(诸如,落后旋转场轴线的位置10度)跟随旋转场轴线的位置。只要永磁同步电机215的内部扭矩大于负载扭矩,转子就同步地、但以一定角度跟随旋转场轴线。
为了确保永磁同步电机215的内部扭矩始终高于负载扭矩(且因此确保永磁同步电机215的转子与定子磁场的旋转场轴线不异步),选择定子磁场的频率和定子磁场的定子磁通强度,使得有足够的内部扭矩来应付制动请求。因此,电子控制器115基于所确定的定子磁通强度来确定定子磁场的频率和定子电压空间矢量(在框510处),该定子磁通强度用于操作永磁同步电机215且因此控制永磁同步电机215的内部扭矩。
两种不同的设计变型允许电子控制器115控制永磁同步电机215的内部扭矩。第一设计变型允许电子控制器115从主缸压力传感器接收主缸230的液压压力(在框515处)。液压压力是主缸230中的压力的度量,其指示永磁同步电机215在向主缸230施加压力(通过齿轮系统220和助推元件225)时经历多少负载。基于液压压力,电子控制器115确定然后由永磁同步电机215生成的定子磁场的频率和定子磁场的定子磁通强度。
定子磁通强度是基于定子空间矢量电流确定的,定子空间矢量电流又是基于定子电压空间矢量长度。
第二设计变型包括电子控制器115,该电子控制器产生具有固定长度的定子电压空间矢量,这继而引起定子磁通强度是固定的。例如,定子电压空间矢量长度可以是固定的,使得永磁同步电机215的内部扭矩始终大于主缸230将需要的压力(负载扭矩)。
在一些实施例中,如果达到目标马达速度梯度限制,则电子控制器115设置标记(框520)以不请求更大的马达速度。例如,一旦确定了目标马达速度梯度,电子控制器115就可请求小于该限制的马达速度量(例如,对于不需要大马达速度的制动请求)。如果电子控制器115接收到新的制动请求(例如,车辆100的操作者进一步压下输入杆205),则电子控制器115然后可请求更快的马达速度。然而,如果达到目标马达速度梯度,则电子控制器115在框520处设置标记。如果在设置标记之后接收到新的制动请求,则电子控制器115将不请求更高的马达速度。对高于目标马达速度梯度限制的速度的请求可引起永磁同步电机215的转子变得与由永磁同步电机215产生的定子磁场的旋转场轴线异步。
在一些实施例中,电子控制器115部分地基于来自电源马达(power supplymotor)(在框525处)的电源电压来确定目标马达速度梯度限制。例如,如果较少的功率对于永磁同步电机215是可获得的,则目标马达速度梯度限制可较低,以便补偿可获得的向永磁同步电机215施加扭矩的较少的功率。
因此,本文中所描述的实施例总体上提供了在闭环马达控制失效时实施用于机电制动器的开环马达控制的系统和方法。
在以下权利要求中阐述了各种特征、优点和实施例。
- 用于机电制动器的开环控制
- 用于补充夹紧机电式制动器的方法以及机电式制动器