位置数据处理方法、装置、电子设备和存储介质
文献发布时间:2023-06-19 10:35:20
技术领域
本发明涉及计算机技术领域,更具体地,涉及一种位置数据处理方法、装置、电子设备和存储介质。
背景技术
随着城市交通越来越复杂,识别热点区域,并分析热点区域内的对象运动轨迹给车辆调度、路线规划等带来了极大地便利。目前,需要对大量轨迹数据记录与热点区域进行匹配,在计算资源有限的情况下,容易出现任务延迟的情况。
发明内容
有鉴于此,本发明实施例提供一种位置数据处理方法、装置、电子设备和存储介质,以降低计算复杂度,提高数据处理效率,同时,可以使得目标对象的位置信息与目标区域的对应关系可视化。
第一方面,本发明实施例提供一种位置数据处理方法,所述方法包括:
获取至少一个目标对象的位置信息,所述位置信息包括城市信息;
根据所述城市信息确定各所述目标对象对应的区域集合;
根据各所述位置信息从对应的区域集合中确定各所述目标对象所在的目标区域;
将各所述目标对象的位置信息与对应的目标区域的对应关系在显示设备上进行展示。
可选地,根据各所述位置信息从对应的区域集合中确定各所述目标对象所在的目标区域包括:
对于任一目标对象,以该目标对象的位置信息为起点,基于射线法从对应的区域集合中确定该目标对象所在的目标区域,以得到各所述目标对象所在的目标区域。
可选地,根据各所述位置信息从对应的区域集合中确定各所述目标对象所在的目标区域包括:
对于任一目标对象,计算该目标对象的位置信息与对应的区域集合中的各区域中心点之间的距离,根据该目标对象的位置信息与对应的区域集合中的各区域中心点之间的距离确定该目标对象所在的目标区域,以得到各所述目标对象所在的目标区域。
可选地,根据该目标对象的位置信息与对应的区域集合中的各区域中心点之间的距离确定该目标对象所在的目标区域包括:
根据该目标对象的位置信息与对应的区域集合中的各区域中心点之间的距离对所述对应的区域集合中的各区域进行排序;
以该目标对象的位置信息为起点,基于射线法按照排序结果确定该目标对象所在的目标区域。
可选地,以该目标对象的位置信息为起点,基于射线法按照排序结果确定该目标对象所在的目标区域包括:
基于排序结果确定当前区域;
以该目标对象的位置信息为起点,基于射线法确定射线与当前区域的交点个数;
响应于当前区域对应的交点个数为奇数,确定当前区域为该目标对象所在的目标区域。
可选地,所述方法还包括:
根据各区域边界的顶点坐标确定各区域中心点坐标。
可选地,将各所述目标对象的位置信息与对应的目标区域的对应关系在显示设备上进行展示包括:
根据预定时间段内的各所述目标对象的位置信息确定各所述目标对象在对应的目标区域内的运动轨迹;
将所述预定时间段内的各所述目标对象的运动轨迹与对应的目标区域在所述显示设备上进行展示。
可选地,所述方法还包括:
根据各所述目标对象的位置信息与对应的目标区域的对应关系确定各所述目标区域内的目标对象的数量;
根据各所述目标区域内的目标对象的数量执行任务调度。
可选地,所述方法还包括:
根据各所述目标对象的位置信息与对应的目标区域的对应关系确定各所述目标区域内的目标对象的数量;
根据各所述目标区域内的目标对象的数量确定各目标区域内的道路拥堵参数;
根据所述道路拥堵参数确定各所述目标对象的行驶路线。
第二方面,本发明实施例提供一种位置数据处理装置,所述装置包括:
位置信息获取单元,被配置为获取至少一个目标对象的位置信息,所述位置信息包括城市信息;
区域集合确定单元,被配置为根据所述城市信息确定各所述目标对象对应的区域集合;
目标区域确定单元,被配置为根据各所述位置信息从对应的区域集合中确定各所述目标对象所在的目标区域;
展示单元,被配置为将各所述目标对象的位置信息与对应的目标区域的对应关系在显示设备上进行展示。
第三方面,本发明实施例提供一种电子设备,包括存储器和处理器,所述存储器用于存储一条或多条计算机程序指令,其中,所述一条或多条计算机程序指令被所述处理器执行以实现如本发明实施例第一方面所述的方法。
第四方面,本发明实施例提供一种计算机可读存储介质,所述计算机可读存储介质内存储有计算机程序,所述计算机程序被处理器执行时实现如本发明实施例第一方面所述的方法。
第五方面,本发明实施例提供一种计算机程序产品,当所述计算机程序产品在计算机上运行时,使得所述计算机执行如本发明实施例第一方面所述的方法。
本发明实施例通过获取至少一个目标对象的位置信息,根据位置信息中的城市信息确定各目标对象对应的区域集合,根据各位置信息从对应的区域集合中确定各目标对象所在的目标区域,将各目标对象的位置信息与对应的目标区域的对应关系在显示设备上进行展示,由此,本发明实施例可以降低计算复杂度,提高数据处理效率,同时,可以对目标对象的位置信息与目标区域的对应关系进行可视化展示,以使得能够直观地获取目标对象的轨迹信息,提高了体验感。
附图说明
通过以下参照附图对本发明实施例的描述,本发明的上述以及其它目的、特征和优点将更为清楚,在附图中:
图1是本发明实施例的位置数据处理方法的流程图;
图2是本发明实施例的一种确定目标区域的过程示意图;
图3是本发明实施例的距离计算方法的示意图;
图4是本发明实施例的多边形区域的示意图;
图5是本发明实施例的一种确定目标区域的方法流程图;
图6是本发明实施例的可视化显示界面示意图;
图7是本发明实施例的位置数据处理过程示意图;
图8是本发明实施例的位置数据处理方法的数据流向图;
图9是本发明实施例的位置数据处理装置的示意图;
图10是本发明实施例的电子设备的示意图。
具体实施方式
以下基于实施例对本发明进行描述,但是本发明并不仅仅限于这些实施例。在下文对本发明的细节描述中,详尽描述了一些特定的细节部分。对本领域技术人员来说没有这些细节部分的描述也可以完全理解本发明。为了避免混淆本发明的实质,公知的方法、过程、流程、元件和电路并没有详细叙述。
此外,本领域普通技术人员应当理解,在此提供的附图都是为了说明的目的,并且附图不一定是按比例绘制的。
除非上下文明确要求,否则在说明书的“包括”、“包含”等类似词语应当解释为包含的含义而不是排他或穷举的含义;也就是说,是“包括但不限于”的含义。
在本发明的描述中,需要理解的是,术语“第一”、“第二”等仅用于描述目的,而不能理解为指示或暗示相对重要性。此外,在本发明的描述中,除非另有说明,“多个”的含义是两个或两个以上。
近年来,GPS等定位设备在车载以及移动终端上得到广泛使用,大量的轨迹数据日益积累,并且由于地理信息以及通讯技术的不断成熟,也使得群体轨迹数据获取的可行性越来越高。目前许多城市的车辆(例如网约车等)上已经安装了GPS设备或其他定位设备,产生了大量的轨迹数据,这些轨迹数据蕴含着居民出行的丰富信息。由此,可以利用空间聚类算法对车辆轨迹点数据进行时空数据监控,获取其隐含的出行行为规律信息,进而可以通过识别出行行为规律信息来确定热点路径和热点区域等信息,而通过实时分析热点区域内或者其周围的车辆轨迹信息可以来确定是否需要进行车辆调度等任务。
在本发明实施例中,主要采用网约车的位置数据过程进行举例说明,应理解,任意携带有GPS等定位设备的出行位置数据均可应用本实施例的方法,例如外卖配送、快递配送等物流运输的位置数据等,本实施例并不对此进行限制。
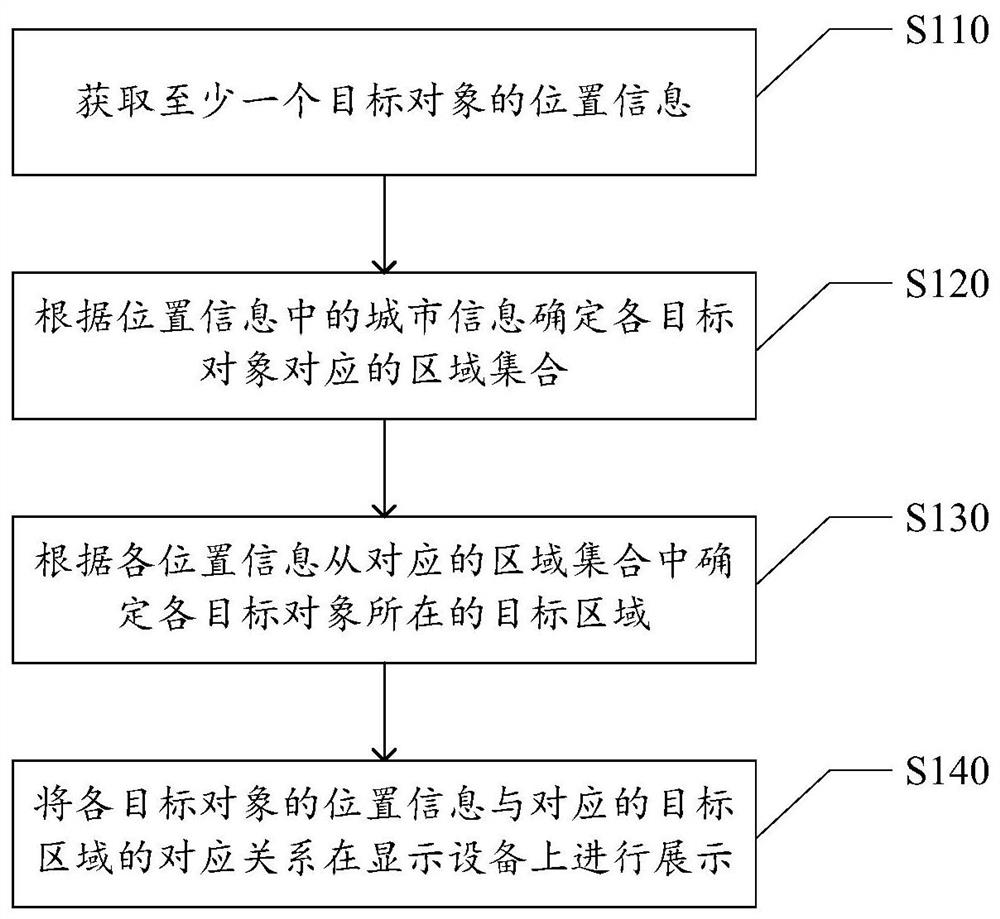
图1是本发明实施例的位置数据处理方法的流程图。如图1所示,本实施例的位置数据处理方法包括以下步骤:
步骤S110,获取至少一个目标对象的位置信息。其中,位置信息包括城市信息。可选的,以目标对象为网约车为例,车辆通过中的包括定位装置的车载设备或者用户终端每隔预定时间上报一次位置信息,其上报的位置信息中包括城市信息。在其他可选的实现方式中,可以根据任务的起点或终点等信息来确定城市信息,在上报实时位置坐标时同时上传该城市信息。
步骤S120,根据位置信息中的城市信息确定各目标对象对应的区域集合。其中,每个城市具有至少一个区域。在本实施例中,假设目标对象目前位于A城市,则将A城市中的区域确定为该目标对象对应的区域集合。可选的,城市内的区域可以根据用户的历史出行轨迹确定,也可以根据该城市内的人流量较大的标志性建筑或者场所确定,本实施例并不对此进行限制。
步骤S130,根据各位置信息从对应的区域集合中确定各目标对象所在的目标区域。
在一种可选的实施例中,步骤S130具体可以包括:对于任一目标对象,以该目标对象的位置信息为起点,基于射线法从该目标对象对应的区域集合中确定该目标对象所在的目标区域,由此,可以获得各目标对象所在的目标区域。可选的,以目标对象的当前位置为起点作射线,确定该射线与该目标对象对应的区域集合中的各区域的交点个数,将交点个数为奇数的区域确定为目标区域。
图2是本发明实施例的一种确定目标区域的过程示意图。如图2所示,以目标对象的位置信息中包含的城市信息为城市A为例,假设城市A包括N个区域21-2N,N大于或等于1,也即该目标对象对应的区域集合包括区域21-2N。目标对象上传的当前位置为p点,则以p点为起点,沿任意方向作射线l,确定该射线分别与区域21-2N的交点个数。如图2所示,射线l与区域21具有3个交点,射线l与区域22具有2个交点,射线l与区域23具有0个交点,射线l与区域2N具有2个交点。由此,可以确定位置p在区域21内,也即区域21为目标对象所在的目标区域。
在一种可选的实现方式中,本实施例可以并行确定射线l分别与区域21-2N之间的交点个数,并将交点个数为奇数的区域确定为对应的目标区域。由此,可以进一步提高数据处理效率。
在另一种可选的实现方式中,本实施例可以分批次确定射线l分别与区域21-2N之间的交点个数,例如,将区域21-2N分为三个区域21-2n1、区域2n1-2n2和区域2n2-2N,其中N>n2>n1≥1。其中,可以先确定射线l分别与区域21-2n1之间的交点个数,若其中存在与射线l的交点个数为奇数的区域,则将该区域确定为对应的目标区域,不再确定射线l与其他批次中的区域的交点个数,若其中不存在与射线l的交点个数为奇数的区域,则依次确定射线l与其他批次中的区域的交点个数。可选的,也可以并行执行射线l与各批次中的区域的交点个数,直至找到与射线l的交点个数为奇数的区域。由此,可以进一步提高数据处理效率。
在另一种可选的实现方式中,本实施例可以依次确定射线l与区域21-2N之间的交点个数,直至找到与射线l的交点个数为奇数的区域。由此,可以进一步降低计算复杂度和计算机消耗。
在另一种可选的实施例中,步骤S130具体可以包括:对于任一目标对象,计算该目标对象的位置信息与对应的区域集合中的各区域中心点之间的距离,根据该目标对象的位置信息与对应的各区域中心点之间的距离确定该目标对象所在的目标区域,由此,可以得到各目标对象所在的目标区域。
图3是本发明实施例的距离计算方法的示意图。在一种可选的实现方式中,计算该目标对象的当前位置与对应的各区域中心点之间的球面距离。如图3所示,其中P点为目标对象的当前位置,Q为对应区域的中心点位置。其中假设P点的坐标为(φ1,λ1),假设Q点的坐标为(φ2,λ2),则P点和Q点之间的球面距离d为:
Δσ=arccos(sinφ1sinφ2sin(Δφ)+cosφ1cosφ2cos(Δλ))
Δφ=|φ1-φ2|
Δλ=|λ1-λ2|
其中,r为球的半径,Δσ为P点和Q点之间的圆心角,其由球面余弦定理确定,φ1、φ2分别表征P点、Q点的纬度,λ1、λ2分别表征P点、Q点的经度,Δφ为P点和Q点之间的纬度差的绝对值,Δλ为P点和Q点之间的经度差的绝对值。
在一种可选的实施例中,本发明实施例的位置数据处理方法还包括:根据各区域边界的顶点坐标确定各区域中心点坐标。
可选的,本实施例中的区域为多边形区域,其包括M个(M大于或等于3)顶点,则一区域的中心点坐标的计算方式如下:
其中,(x
图4是本发明实施例的多边形区域的示意图。如图4所示,多边形区域4包括顶点a1-a6,根据顶点a1-a6的坐标基于上述计算中心点坐标的公式,可以确定多边形区域4的中心点为C。
在一种可选的实现方式中,根据目标对象当前位置与对应的各区域中心点之间的距离确定该目标对象所在的目标区域具体包括:根据该目标对象当前位置与对应的各区域中心点之间的距离对对应的区域集合中的各区域进行排序,以该目标对象的位置信息为起点,基于射线法按照排序结果确定该目标对象所在的目标区域。由此,可以降低计算量和计算复杂度,提高数据处理效率。
在一种可选的实现方式中,在对区域集合中的各区域进行排序之前,可以先根据距离阈值对区域集合中的各区域进行筛选。也即,在本实现方式中,筛除与目标对象当前位置的距离大于或等于距离阈值的区域,对与目标对象当前位置的距离小于该距离阈值的区域进行排序,以该目标对象的位置信息为起点,基于射线法按照排序结果确定该目标对象所在的目标区域。由此,可以进一步地降低计算量和计算复杂度,提高数据处理效率。可选的,距离阈值可以根据该城市中最大的热点区域的最长直径进行确定。
图5是本发明实施例的一种确定目标区域的方法流程图。如图5所示,本实施例的确定目标区域的方法包括以下步骤:
步骤S210,根据排序结果确定当前区域。可选的,在本实施例中,根据目标对象的位置信息与各区域的距离从小到大进行排序,将排序结果中的第一个区域确定为当前区域。
步骤S220,以目标对象的位置信息为起点,基于射线法确定射线与当前区域的交点个数。
步骤S230,判断以该目标对象的位置信息为起点的射线与当前区域的交点个数是否为奇数,若为奇数,执行步骤S240,若为偶数,执行步骤S210,根据排序结果将序列中的下一个区域确定为当前区域。
步骤S240,响应于以该目标对象的位置信息为起点的射线与当前区域的交点个数为奇数,确定当前区域为目标对象所在的目标区域。
本实施例通过对目标对象对应的区域集合中的各区域进行排序,或者对与目标对象当前位置的距离小于距离阈值的各区域进行排序,并根据排序结果依次确定以目标对象的位置信息为起点的射线与当前区域的交点个数是否为奇数,可以提高目标区域的查找效率,并进一步降低了计算量。
步骤S140,将各目标对象的位置信息与对应的目标区域的对应关系在显示设备上进行展示。可选的,在显示设备中,将目标对象的位置信息显示在对应的目标区域内。
本发明实施例通过获取至少一个目标对象的位置信息,根据位置信息中的城市信息确定各目标对象对应的区域集合,根据各位置信息从对应的区域集合中确定各目标对象所在的目标区域,将各目标对象的位置信息与对应的目标区域的对应关系在显示设备上进行展示,由此,本发明实施例可以降低计算复杂度,提高数据处理效率,同时,可以对目标对象的位置信息与目标区域的对应关系进行可视化展示,以使得能够直观地获取目标对象的轨迹信息,提高了体验感。
在一种可选的实施例中,步骤S140具体可以包括:根据预定时间段内的各目标对象的位置信息确定各目标对象在对应目标区域内的运动轨迹,将该预定时间段内的各目标对象的运动轨迹与对应的目标区域在显示设备上进行展示。在车辆行驶过程中,车辆的位置是实时变化的,根据车辆周期性上传的位置信息可以确定该车辆的轨迹信息,将该车辆的轨迹信息与对应的目标区域在显示设备上进行显示。由此,本实施例可以实现车辆运动轨迹和目标区域的对象关系的可视化,根据可视化的信息可以直观地确定热点区域的任务压力以及区域内的各路段的拥挤程度,因此,可以基于可视化的信息对车辆进行调度、和/或轨迹规划。
在一种可选的实现方式中,以网约车场景为例,显示设备可以为服务器端的显示屏设备,以供调度工作人员直观地确定各区域内的任务密集程度,并基于此进行对各区域的网约车进行调度,由此,可以进一步综合各区域的任务压力,使得实时热点区域内具有充足的网约车,并避免非热点区域的网约车闲置。
在一种可选的实现方式中,以网约车场景为例,显示设备可以为司机终端的显示屏或者车载设备(例如导航仪等)的显示屏,以供司机直观地确定该城市内各热点区域和热点路径上的网约车数量,由此,司机可以基于该可视化的信息确定行驶路线,以缓解当前热点区域的任务压力。
在一种可选的实现方式中,以网约车场景为例,显示设备可以为用户终端的显示屏,在用户进入网约车软件中查看实时热点区域或者所在区域内的车辆情况时,将各实时热点区域或其所在区域内的车辆情况发送至用户终端,并在用户终端的显示屏上进行显示。由此,用户可以基于热点区域内或所在区域的车辆情况指导出行计划等,提高了用户体验。
在一种可选的实施例中,位置数据处理方法还包括:根据各目标对象的位置信息与对应的目标区域的对应关系确定各目标区域内的目标对象的数量,根据各目标区域内的目标对象的数量执行任务调度。以网约车场景为例,确定各区域内的实时网约车数量,并根据该区域的实时网约车数量、实时任务量、历史相同时间段该区域内的任务量等信息确定该区域中的任务压力参数,根据任务压力参数来进行车辆调度。例如,若该区域的任务压力参数较大,例如实时网约车数量小于实时任务量,且在未来预定时间段内的任务量会持续增加,则向该区域调度更多的车辆。
在一种可选的实施例中,位置数据处理方法还包括:根据各目标对象的位置信息与对应的目标区域的对应关系确定各目标区域内的目标对象的数量,根据各目标区域内的目标对象的数量确定各目标区域内的道路拥堵参数,根据道路拥堵参数确定各目标对象的行驶路线。可选的,可以根据各目标区域内的目标对象的数量以及历史数据确定各目标区域内的道路拥堵参数,根据道路拥堵参数规划各目标对象的行驶路线。其中,历史数据可以包括区域内各路段上的拥堵情况、事故情况等路况信息。
图6是本发明实施例的可视化显示界面示意图。如图6所示,可视化显示界面6包括网约车轨迹显示区域61、信息显示区域62和信息显示区域63。网约车轨迹显示区域61用于显示A市内各区域的运动轨迹。信息显示区域62用于显示A市当前的各类型车的实时订单数(例如x1型车等)、近24小时内的各类型车的订单趋势图、以及各区域内的实时订单数。信息显示区域63用于显示按订单数量排序的热门出发地点、按订单数量排序的热门到达地点以及当前订单明细(包括时间、司机、起终点等信息)。
在本实施例中,通过实时获取车辆对应的目标区域,确定车辆轨迹与区域的对象关系,并显示在网约车显示区域61内,同时,在信息显示区域62和63显示实时订单信息以及热门起终点等信息,由此,可以使得运营端、和/或司机端、和/或乘客端能够实时地、直观地获取各类交通数据,以更好的指导后续行为,提高了各端的便利性和体验感。
图7是本发明实施例的位置数据处理过程示意图。如图7所示,在本实施例中,采用kafka(分布式发布订阅消息系统)、flink sql(符合标准sql语义的分布式流数据引擎)和druid(数据库连接池)相结合的方式来对车辆的轨迹流数据进行实时流式处理。其中,kafka从日志中获取数据,flink sql读取kafka中的数据并写入mysql数据库或hive数据库或文件中,并将数据从kafka加载到druid中,以便于数据提取和查询。
在本实施例中,如图7所示,在数据采集层采用kafka对各车辆的轨迹流进行分布式采集,并在实时明细层对采集的轨迹流进行数据清洗(例如筛除明显错误的轨迹点等)、多流join等处理,获取多流join处理后的结果,也即获取合并后的轨迹流,输出至对应的topic中。在实时汇总层,从缓存文件中获取各区域数据(包括区域中心点坐标等),并对各区域数据和实时获取的轨迹流数据进行汇总,之后对预定时间段内的轨迹流数据进行汇总,以汇总各车辆在该预定时间段内的轨迹信息以及其与各区域的对应关系,将各车辆在该预定时间段内的轨迹信息以及其与各区域的对应关系发送至显示设备进行显示。可选的,采用图1中所示的步骤S110-S140的方法以实现对各区域数据和实时获取的轨迹流数据的汇总,在此不再赘述。
本实施例采用kafka、flink sql和druid相结合的方式对获取的轨迹流进行分布式流式处理,进一步提高了数据处理效率。并且,本实施例通过获取至少一个目标对象的位置信息,根据位置信息中的城市信息确定各目标对象对应的区域集合,根据各位置信息从对应的区域集合中确定各目标对象所在的目标区域,将各目标对象的位置信息与对应的目标区域的对应关系在显示设备上进行展示,由此,本发明实施例可以降低计算复杂度,提高数据处理效率,同时,可以对目标对象的位置信息与目标区域的对应关系进行可视化展示,以使得能够直观地获取目标对象的轨迹信息,提高了体验感。
图8是本发明实施例的位置数据处理方法的数据流向图。如图8所示,获取车载设备81、和/或用户终端82(司机终端和/或乘客终端)、上传的实时轨迹流,对实时轨迹流进行解析获取城市信息等数据,根据城市信息对各区域进行粗粒度筛选,获取该实时轨迹流中的位置信息所属城市的各区域,以获取该车辆对应的区域集合,根据车辆实时位置与对应的区域集合中的各区域中心点之间的距离,根据距离从近到远对区域集合中的各区域进行排序,并基于射线法,按照排序结果依次确定以车辆实时位置为起点的射线与各区域之间的交点个数,直至获得交点个数为奇数的区域,将该区域确定为车辆当前所在的目标区域。之后,通过拼接汇总预定时间内的各车辆的轨迹流,确定车辆行驶轨迹以及其与目标区域的对应关系等车辆轨迹信息,将车辆轨迹信息发送至显示设备进行显示。
本实施例通过获取至少一个目标对象的位置信息,根据位置信息中的城市信息确定各目标对象对应的区域集合,根据各位置信息从对应的区域集合中确定各目标对象所在的目标区域,将各目标对象的位置信息与对应的目标区域的对应关系在显示设备上进行展示,由此,本发明实施例可以降低计算复杂度,提高数据处理效率,同时,可以对目标对象的位置信息与目标区域的对应关系进行可视化展示,以使得能够直观地获取目标对象的轨迹信息,提高了体验感。
在一种可选的实施例中,实时获取各车辆所在的目标区域后,可根据车辆与其目标区域的对应关系,确定各区域中的实时车辆数量,根据各区域中的实时车辆数量进行车辆调度。可选的,根据各区域中的实时车辆数量、实时任务数量以及相同时间段内的历史任务数量等信息进行车辆调度。
在一种可选的实施例中,实时获取各车辆所在的目标区域后,可根据车辆与其目标区域的对应关系,确定各区域中的实时车辆数量,根据各区域中的实时车辆数量进行轨迹规划。可选的,根据各区域中的实时车辆数量以及历史路况信息等确定区域内的道路拥堵参数,根据道路拥堵参数进行路线规划。由此,可以提高规划的路线的准确性,进而提高出行效率。
图9是本发明实施例的位置数据处理装置的示意图。如图9所示,如图9所示,本实施例的位置数据处理装置9包括位置信息获取单元91、区域集合确定单元92、目标区域确定单元93和展示单元94。
位置信息获取单元91被配置为获取至少一个目标对象的位置信息,所述位置信息包括城市信息。区域集合确定单元92被配置为根据所述城市信息确定各所述目标对象对应的区域集合。目标区域确定单元93被配置为根据各所述位置信息从对应的区域集合中确定各所述目标对象所在的目标区域。展示单元94被配置为将各所述目标对象的位置信息与对应的目标区域的对应关系在显示设备上进行展示。
在一种可选的实施例中,目标区域确定单元93包括第一确定子单元。第一确定子单元被配置为对于任一目标对象,以该目标对象的位置信息为起点,基于射线法从对应的区域集合中确定该目标对象所在的目标区域,以得到各所述目标对象所在的目标区域。
在一种可选的实施例中,目标区域确定单元93包括距离计算子单元和第二确定子单元。距离计算子单元被配置为对于任一目标对象,计算该目标对象的位置信息与对应的区域集合中的各区域中心点之间的距离。第二确定子单元被配置为根据该目标对象的位置信息与对应的区域集合中的各区域中心点之间的距离确定该目标对象所在的目标区域,以得到各所述目标对象所在的目标区域。
在一种可选的实施例中,第二确定子单元包括排序模块和第一确定模块。排序模块被配置为根据该目标对象的位置信息与对应的区域集合中的各区域中心点之间的距离对所述对应的区域集合中的各区域进行排序。第一确定模块被配置为以该目标对象的位置信息为起点,基于射线法按照排序结果确定该目标对象所在的目标区域。
在一种可选的实施例中,第一确定模块包括当前区域确定子模块、交点数量确定子模块和目标区域确定子模块。当前区域确定子模块被配置为基于排序结果确定当前区域。交点数量确定子模块被配置为以该目标对象的位置信息为起点,基于射线法确定射线与当前区域的交点个数。目标区域确定子模块被配置为响应于当前区域对应的交点个数为奇数,确定当前区域为该目标对象所在的目标区域。
在一种可选的实施例中,位置数据处理装置9还包括坐标确定单元。坐标确定单元被配置为根据各区域边界的顶点坐标确定各区域中心点坐标。
在一种可选的实施例中,展示单元94包括轨迹确定子单元和展示子单元。轨迹确定子单元被配置为根据预定时间段内的各所述目标对象的位置信息确定各所述目标对象在对应的目标区域内的运动轨迹。展示子单元被配置为将所述预定时间段内的各所述目标对象的运动轨迹与对应的目标区域在所述显示设备上进行展示。
在一种可选的实施例中,位置数据处理装置9还包括第一数量确定单元和任务执行单元。第一数量确定单元被配置为根据各所述目标对象的位置信息与对应的目标区域的对应关系确定各所述目标区域内的目标对象的数量。任务执行单元被配置为根据各所述目标区域内的目标对象的数量执行任务调度。
在一种可选的实施例中,位置数据处理装置9还包括第二数量确定单元、参数确定单元和路线规划单元。第二数量确定单元被配置为根据各所述目标对象的位置信息与对应的目标区域的对应关系确定各所述目标区域内的目标对象的数量。参数确定单元被配置为根据各所述目标区域内的目标对象的数量确定各目标区域内的道路拥堵参数。路线规划单元被配置为根据所述道路拥堵参数确定各所述目标对象的行驶路线。
本实施例通过获取至少一个目标对象的位置信息,根据位置信息中的城市信息确定各目标对象对应的区域集合,根据各位置信息从对应的区域集合中确定各目标对象所在的目标区域,将各目标对象的位置信息与对应的目标区域的对应关系在显示设备上进行展示,由此,本发明实施例可以降低计算复杂度,提高数据处理效率,同时,可以对目标对象的位置信息与目标区域的对应关系进行可视化展示,以使得能够直观地获取目标对象的轨迹信息,提高了体验感。
图10是本发明实施例的电子设备的示意图。如图10所示,电子设备10为通用数据处理装置,其包括通用的计算机硬件结构,其至少包括处理器101和存储器102。处理器101和存储器102通过总线103连接。存储器102适于存储处理器101可执行的指令或程序。处理器101可以是独立的微处理器,也可以是一个或者多个微处理器集合。由此,处理器101通过执行存储器102所存储的指令,从而执行如上所述的本发明实施例的方法流程实现对于数据的处理和对于其它装置的控制。总线103将上述多个组件连接在一起,同时将上述组件连接到显示控制器104和显示装置以及输入/输出(I/O)装置105。输入/输出(I/O)装置105可以是鼠标、键盘、调制解调器、网络接口、触控输入装置、体感输入装置、打印机以及本领域公知的其他装置。典型地,输入/输出装置105通过输入/输出(I/O)控制器106与系统相连。
本领域的技术人员应明白,本申请的实施例可提供为方法、装置(设备)或计算机程序产品。因此,本申请可采用完全硬件实施例、完全软件实施例或结合软件和硬件方面的实施例的形式。而且,本申请可采用在一个或多个其中包含有计算机可用程序代码的计算机可读存储介质(包括但不限于磁盘存储器、CD-ROM、光学存储器等)上实施的计算机程序产品。
本申请是参照根据本申请实施例的方法、装置(设备)和计算机程序产品的流程图来描述的。应理解可由计算机程序指令实现流程图中的每一流程。
这些计算机程序指令可以存储在能引导计算机或其他可编程数据处理设备以特定方式工作的计算机可读存储器中,使得存储在该计算机可读存储器中的指令产生包括指令装置的制造品,该指令装置实现流程图一个流程或多个流程中指定的功能。
也可提供这些计算机程序指令到通用计算机、专用计算机、嵌入式处理机或其他可编程数据处理设备的处理器以产生一个机器,使得通过计算机或其他可编程数据处理设备的处理器执行的指令产生用于实现在流程图一个流程或多个流程中指定的功能的装置。
本实施例通过获取至少一个目标对象的位置信息,根据位置信息中的城市信息确定各目标对象对应的区域集合,根据各位置信息从对应的区域集合中确定各目标对象所在的目标区域,将各目标对象的位置信息与对应的目标区域的对应关系在显示设备上进行展示,由此,本发明实施例可以降低计算复杂度,提高数据处理效率,同时,可以对目标对象的位置信息与目标区域的对应关系进行可视化展示,以使得能够直观地获取目标对象的轨迹信息,提高了体验感。
本发明的另一实施例涉及一种非易失性存储介质,用于存储计算机可读程序,所述计算机可读程序用于供计算机执行上述部分或全部的方法实施例。
即,本领域技术人员可以理解,实现上述实施例方法中的全部或部分步骤是可以通过程序来指定相关的硬件来完成,该程序存储在一个存储介质中,包括若干指令用以使得一个设备(可以是单片机,芯片等)或处理器(processor)执行本申请各实施例所述方法的全部或部分步骤。而前述的存储介质包括:U盘、移动硬盘、只读存储器(ROM,Read-OnlyMemory)、随机存取存储器(RAM,Random Access Memory)、磁碟或者光盘等各种可以存储程序代码的介质。
以上所述仅为本发明的优选实施例,并不用于限制本发明,对于本领域技术人员而言,本发明可以有各种改动和变化。凡在本发明的精神和原理之内所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 位置数据处理方法、装置、电子设备和存储介质
- 位置确定方法、位置确定装置、电子设备及可读存储介质