一种波浪补偿船舶及其波浪补偿方法
文献发布时间:2023-06-19 11:30:53
技术领域
本发明涉及船舶技术领域,尤其涉及一种波浪补偿船舶及其波浪补偿方法。
背景技术
船舶是海上的重要交通运输工具,是搭载人员和设备的重要载体,但由于海浪的影响,船舶会出现剧烈的摇晃和颠簸,严重影响人员的生活和设备的工作。船用波浪补偿平台是目前解决海浪影响的重要装备,主要应用于船载设备,用以提高设备工作精度和海浪对人员的影响,如波浪补偿栈桥、波浪补偿吊机等。虽然船用波浪补偿平台应用已经非常广泛,但都是针对单一的设备或者装置进行波浪补偿,尚未出现对船舶的整个甲板载体进行整体波浪补偿。
发明内容
发明目的:针对现有技术存在的问题,本发明提供一种适用于复杂海域环境航行的波浪补偿船舶,本发明的另一目的是提供一种可靠性强、波浪补偿精度高的波浪补偿方法。
技术方案:本发明所述的一种波浪补偿船舶,包括下层船体、上层载体和主动波浪补偿系统三大部分,所述下层船体为水中运动主船体,具备一般船舶属性,包含动力与船舶配套设备等;所述下层船体头尾端上部装有锚绞机等不需要波浪补偿的所有基础设施;所述上层载体为人员和易受摇摆影响设备的承载部分,为需进行波浪运动补偿的整体;所述上层载体由甲板与舱室等结构体组成,包含人员居住与工作室、功能舱室及相应设备等;所述主动波浪补偿系统为上层载体与下层船体之间的连接部分,由能产生补偿运动的油缸或电动缸组件与测控装置、液动系统、电动系统、联接件、辅助装置组成。
主动波浪补偿系统的执行件包括主动缸和随动缸,各执行件通过联接件安装在下层船体和上层载体之间;所述主动缸布置在船舶前端、后端以及两侧,所述随动缸沿下层船体的中轴线方向均匀布置在船舶中部,用于分担负载,以及防止横移、纵移和艏摇,在每个主动缸和随动缸上都安装有线位移传感器,用来测量执行件伸缩运动的位移量,在下层船体的重心位置安装有姿态传感器,姿态传感器通过信号线联接运动控制器;姿态传感器检测下层船体的横摇、纵摇、升沉的运动姿态值,并将检测值输入运动控制器中,上层载体安装有角度传感器,测量实际的转动的角度,运动控制器根据波浪补偿值的反解算法计算出横摇、纵摇、升沉的补偿值,根据补偿值控制各执行件油缸或者电动缸动作,实现上层载体的三自由度补偿。
进一步的,所述主动波浪补偿系统的执行件为油缸或电动缸。可选的,所述联接件为销轴联接、万向节联接或者球铰联接。
进一步的,在所述油缸或者电动缸的安装位置处进行结构加强。
进一步的,所述下层船体包括进排气管,将排气管布置至船艉或者船体其他不干涉主动波浪补偿系统运动的位置。
进一步的,所述下层船体和上层载体之间留有供上层载体摆动的空间,且所述设置有防止海水进入船体内的结构或柔性密封材料。
一种基于所述波浪补偿船舶的波浪补偿方法,所述波浪补偿船舶的前中部、后中部均设有至少一个执行件,波浪补偿方法包括如下内容:
(1)姿态传感器检测下层船体的横摇、纵摇、升沉的运动姿态值a1、a2、a3;
(2)当a2=a3=0,且a1≠0,表示有横摇无纵摇无升沉运动,运动控制器控制布置于两侧的主动缸动作,一侧缩短时,另一侧伸长,其他缸不动作;定义两侧主动缸距离中心轴线垂直距离为S,横摇角为θ,上层载体距离下层船体高度为h,则此时两侧主动缸的伸长/缩短量为L=L1-L0,其中L1=h+S*tanθ,L0=h;
(3)当a1=a3=0,且a2≠0,表示有纵摇无横摇无升沉运动,布置于船舶前侧和前中部的执行件伸长时,布置于后侧和后中部的执行件缩短,布置于船舶前侧和前中部的执行件缩短时,布置于后侧和后中部的执行件伸长;定义船舶前中部、后中部的执行件距离纵摇轴垂直距离为M,船舶前侧、后侧的执行件距离纵摇轴垂直距离为N,纵摇角为
(4)当a1=a2=0,且a3≠0,表示有升沉运动,定义升高(下沉)值为h’,上层载体距离下层船体高度为h,则此时所有缸同步动作,缩短/伸长量为L=L1-L0,其中L1=h+h’,L0=h。
和现有技术相比,本发明具有如下有益效果:
1、通过分离下层船体与上层载体,给上层载体整体波浪补偿提供动作空间;根据船体的横摇、纵摇、升沉运动,缸体作出波浪补偿动作,从而调整船舶状态。2、通过单元化设计,将锚绞机等不需要波浪补偿的基础设施布置在下层船体头尾端,将动力系统、推进系统、进排气系统、进排水系统、减摇装置等船舶所必需的基础设施集中在下层船体,将生活、作业、控制等需要波浪补偿的各功能室布置于上层载体部分,在使用时功能明确、便于操控,从而实现使用和维护时的高针对性,也降低了波浪补偿时的负载。3、通过在下层船体与上层载体之间连有具备防水性的柔性连接层或者设有海水阻隔结构,减小进入下层船体的水量。4、通过将油缸或电动缸布置在上层载体下方房间的空档内,提高了空间利用率。5、通过缸的冗余设计,使其主要具备负载以及防扭的功能,提高了主动波浪补偿系统的可靠性和波浪补偿精度;当需要上层载体高出下层船体的时候,主动波浪补偿系统还可用作上层载体的提升机构,通过模块化的设计,下层船体、上层载体和主动波浪补偿系统独立工作,在维修保养时,易于找出问题所在,降低了整体故障率。
附图说明
图1为本发明实施例波浪补偿船舶的轴侧视图;
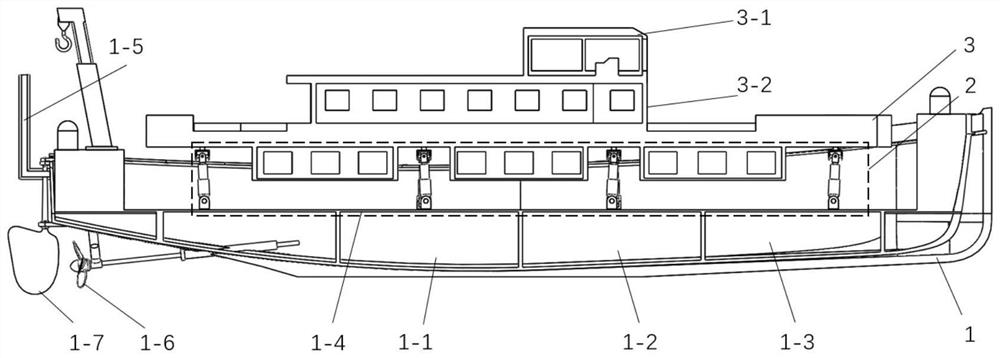
图2为本发明实施例波浪补偿船舶的纵向剖视图;
图3为本发明实施例波浪补偿船舶的主船体内平面板的俯视图;
图4为本发明实施例波浪补偿船舶的液压缸联接件的正视图;
图5位本发明实施例波浪补偿船舶的波浪补偿控制系统原理图。
附图标记说明:
1:下层船体;1-1:动力舱室;1-2:进排气舱室;1-3:进排水舱;1-4:平面板;1-5:进排气管道;1-6:推进器;1-7:方向舵;2:波浪补偿系统;2-1至2-6:主动缸;2-7至2-8:随动缸;2-9:联接件;3:甲板;3-1:控制室;3-2:各功能室。
具体实施方式
一种波浪补偿船舶,包括下层船体、波浪补偿系统和上层载体。波浪补偿系统可选择为三自由度系统,并可根据实际需求引申到单自由度或其他多自由度系统。波浪补偿系统包括执行件油缸或者电动缸,在进行执行件位置布置时,油缸或电动缸各安装位置局部设计应满足处在同一平面、位置精度高等其他可确保和提高主动波浪补偿系统控制精度的要求。具体的,执行件油缸或者电动缸的位置布置中心轴与下层船体的龙骨在同一平面内投影重合,两侧的油缸或者电动缸位置布置关于该中心轴对称,且油缸或电动缸布置的数量以实际主动波浪补偿系统的自由度数为基础作出适应性布置。执行件油缸或电动缸可根据实际负载情况,在实际主动波浪补偿系统的自由度数所决定的缸数的基础上,作出适应性的增加,通过冗余设计以保证主动波浪补偿系统的整体负载安全。
其中,将锚绞机等不需要波浪补偿的基础设施布置在下层船体头尾端,将动力系统、推进系统、进排气系统、进排水系统、减摇装置等船舶所必需的基础设施集中在下层船体底部,将生活、作业、控制等需要波浪补偿的各功能室布置于上层载体。
机电相关设备,应与主动波浪补偿系统的功率相匹配,且姿态测量装置,可根据实际控制需要,冗余布置安装在下层船体。
下层船体底部的动力舱室内通过发电机组、液压泵站等给船舶提供动力。减摇装置包括减摇鳍、舭龙骨、减摇水舱、减摇陀螺和舵减摇等,可根据具体船型选用。由于上层载体在波浪补偿时会处于运动状态,所以进排气管道不宜布置在甲板上,所以布置其于船舶艉部,下层船体底部的进排气舱室与其相连,以满足船舶的气体需求。
由于下层船体与上层载体的分离式设计,会导致船舶进水量的增加,且大都流向下层船体底部,因此除了在下层船体和上层载体之间安装柔性防水层,还将进排水舱室布置于下层船体底部,提高其作业效率,保障船舶的安全性。
此外,下层船体底部油缸或电动缸的局部安装位置作为波浪补偿系统主要承重件,应具有足够的平整度和强度。其次,
油缸或电动缸布置在下层船体底部的平面板和上层载体之间,通过联接件联接。联接方式包含销轴联接、万向节联接、球铰联接等。
油缸或电动缸分为主动缸和随动缸,主动缸布置在外侧,主要作为波浪补偿运动执行件,随动缸除了分担负载以外,还防止横移、纵移和艏摇。
当需要上层载体高出下层船体的时候,主动波浪补偿系统还可用作上层载体的提升机构。
为详细说明本发明的技术内容、所实现目的及效果,以下结合实施方式并配合附图予以说明。
如图1-图4,下层船体1底部有动力舱室1-1、进排气舱室1-2及进排水舱室1-3等。下层船体1内有一平面板1-4覆在各舱室顶部;下层船体1艉部有进排气管道1-5、推进器1-6和方向舵1-7;甲板3上方有控制室3-1及其他功能室3-2;甲板3下方的房间之间留有间隙;波浪补偿系统2包含测控装置、液动系统、电动系统、联接件2-9、辅助装置等。
参见图3,主动波浪补偿系统的执行件油缸的布置位置如下:第一油缸2-1、第四油缸2-4、第七油缸2-7、第八油缸2-8沿下层船体的中轴线方向布置,其中,第七油缸2-7位于船舶的前中部,第八油缸位于船舶的后中部,且第一油缸2-1、第七油缸2-7和第四油缸2-4、第八油缸2-8关于下层船体的转动轴线对称,第二油缸2-2、第三油缸2-3、第五油缸2-5、第六油缸2-6分别布置在两侧(第二油缸2-2、第三油缸2-3布置在右侧,第五油缸2-5、第六油缸2-6布置在左侧),其中第三油缸2-3、第五油缸2-5和第八油缸2-8安装点位于同一直线上,且该直线平行于纵摇轴Y,第二油缸2-2、第六油缸2-6和第七油缸2-7安装点也位于同一直线上,且该直线也平行于纵摇轴Y。
在每个油缸上都安装有线位移传感器,用来测量油缸的伸缩运动的位移量,在下层船体的重心位置安装有姿态传感器,姿态传感器通过信号线联接运动控制器,姿态传感器用于检测下层船体的横摇、纵摇、升沉值,并将检测值输入运动控制器中,上层载体安装有角度传感器,测量实际的转动的角度,作为控制系统的闭环输入信号,以提高波浪补偿系统的精度。
波浪补偿的具体方法如下:
(1)通过姿态传感器测量船体的横摇、纵摇、升沉的运动姿态值a1、a2、a3,并实时传输给运动控制器,运动控制器根据波浪补偿值的反解算法计算出横摇、纵摇、升沉的补偿值,根据补偿值控制各油缸动作,实现上层载体的三自由度补偿;
(2)当a2=a3=0,且a1≠0,有横摇运动时,控制器控制布置于两侧的油缸2-2、2-3、2-5、2-6动作,其中2-2、2-3伸长(缩短)时,2-6、2-7缩短(伸长),其他缸不动作;当a1=a3=0,且a2≠0,有纵摇运动时,控制所有缸都动作,且布置于前侧的油缸2-1、2-2、2-6、2-7伸长(缩短)时,布置于后侧的油缸2-3、2-4、2-5、2-8缩短(伸长);当a1=a2=0,且a3≠0,有升沉运动时,控制器控制所有缸全部动作,所有缸同时伸长(缩短)。
如图5所示,各油缸的伸缩补偿值由姿态传感器测得下层船体的姿态,并将测得的数据传输给运动控制器,运动控制器根据波浪补偿的反解算法,计算出横摇、纵摇、升沉的补偿值。
以油缸下端竖直固定于下层船体,上端以虎克铰联接上层载体下平面为例:有横摇无纵摇无升沉运动时,假设缸第三油缸2-3、第五油缸2-5距离第八油缸2-8所在的中心轴线X垂直距离为S,横摇角为θ,上层载体距离下层船体高度为h,则此时第二油缸2-2、第三油缸2-3伸长(缩短)量为L=L1-L0,其中L1=h+Stanθ,L0=h,第五油缸2-5、第七油缸2-7缩短(伸长)量也为L=L1-L0,其中L1=h+Stanθ,L0=h;有纵摇无横摇无升沉运动时,假设第三油缸2-3、第五油缸2-5、第八油缸2-8和第二油缸2-2、第六油缸2-6、第七油缸2-7距离纵摇轴Y垂直距离为M,第四油缸2-4和第一油缸2-1距离纵摇轴Y垂直距离为N,纵摇角为
本发明分离了下层船体和上层载体,给上层载体整体波浪补偿提供动作空间,在船舶空间有限的情况下,将油缸或电动缸布置于上层载体和下层船体的空档内,通过减小单根缸的缸径,多缸冗余协调运作,在有限的空间内,实现了符合要求的波浪补偿功能。
- 一种波浪补偿船舶及其波浪补偿方法
- 一种具有波浪补偿功能的船用医护床及波浪补偿方法