牵引辅助装置
文献发布时间:2023-06-19 11:37:30
技术领域
本发明涉及一种牵引辅助装置。
背景技术
在诸如汽车等的车辆中,通过将连接器安装在车辆的后部,使拖车能够连接于连接器并被牵引。
众所周知,在与拖车连接的车辆中,在倒车时,如果车辆与拖车形成的角度在一定程度上变得比一定水平更陡,则拖车由于所谓的折刀现象(Jackknifing phenomenon)而不能够移动。在发生这种折刀现象时,倒车的车辆有可能与停止状态的拖车发生碰撞,因此必须小心地向后移动(倒车)车辆,以免引起折刀现象。
因此,已经开发有一种倒车辅助装置,其用于以监视车辆的倒车并执行转向操作从而不发生折刀现象(例如,参照专利文献1)。
(现有技术文献)
(专利文献)
专利文献1:美国专利申请公开号2015/0344067A1
发明内容
(发明所要解决的问题)
但是,在上述专利文献1所记载的倒车辅助装置中,由于以从上方朝向正下方俯视的方式观察(监视)显示在安装于车辆的显示器上的车辆与拖车之间的角度,并且通过转动设置在显示器周围的控制旋钮来间接实施车辆的转向操作,因此难以在感官上理解显示与控制旋钮之间的关系,此外,还存在难以通过控制旋钮操作等的问题。
因此,本发明鉴于上述的问题而做出。
(解决问题所采用的措施)
针对上述问题,本发明提供一种牵引辅助装置,其特征在于,具备:控制部,其辅助通过连接器连接有拖车的车辆的倒车;显示器,其至少在所述车辆倒车时,从车辆前方侧观察车辆后方侧后视的状态显示安装在所述车辆的后部的所述连接器的周围,所述控制部具备:警报角计算部,其在倒车时,获取相同或者小于由所述车辆和所述拖车引起折刀现象的折刀角度的警报角度;以及警报产生部,其在所述车辆和所述拖车形成的拖车角超过所述警报角度时发出警报。
(发明的效果)
根据本发明的上述构成,在倒车连接有拖车的车辆时,能够地在感官上容易理解的方式辅助倒车等。
附图说明
图1是表示具备实施例的牵引辅助装置的车辆以及连接于该车辆的拖车的状态的侧面图。
图2是表示图1的连接器的立体图。
图3是示出拖车角的车辆和拖车的平面图。
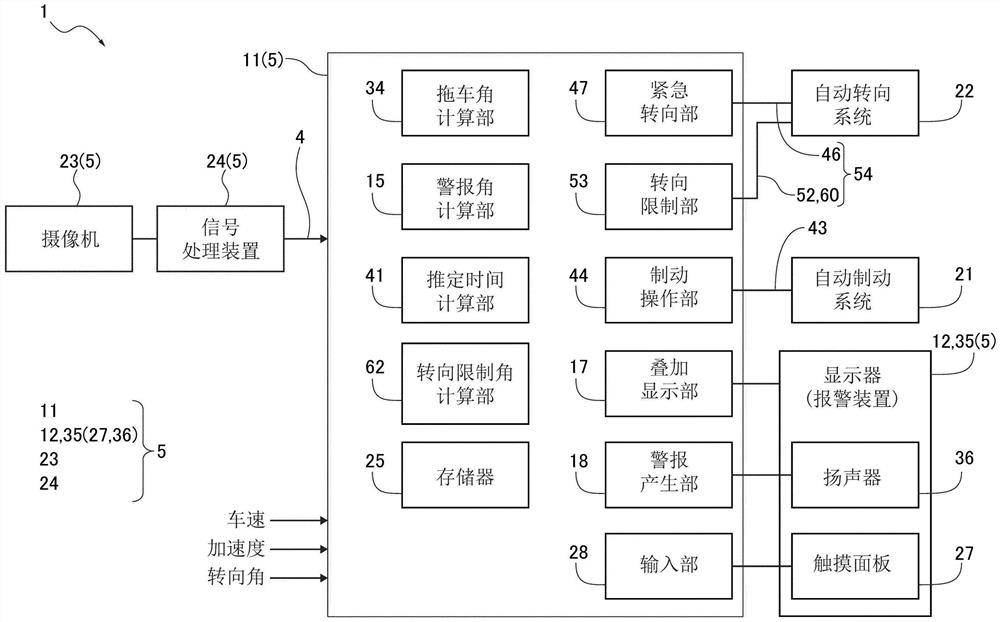
图4是表示牵引辅助装置的概要的框图。
图5是表示显示器的显示的图。
图6是表示牵引辅助装置的控制部的框图。
图7是表示折刀角度、不产生折刀角度的转向范围和警报角度之间的关系的图。
图8是示出角度検出装置的车辆后部的立体图。
图9是示出要被代入用于计算折刀角度和拖车角速度的关系表达式的车辆和拖车的参数的平面图。
图10是示出用于获得增益的地图的图。其中,图10A是获得拖车速度阈值,图10B是获得拖车加速度阈值,图10C是获得轮胎角度阈值,图10D是获得拖车角速度阈值的地图。
图11是示出将转向可能区域限制在警报角度的内侧区域内的状态的图。
图12A是示出转向可能区域被变窄之前的图,图12B是示出转向可能区域被被变窄至转向限制角附近的状态的图。
图13是示出拖车角和转向角之间的关系的曲线图。其中,图13A是示出拖车角的随时间变化的曲线图,图13B是示出转向角的随时间变化的曲线图。
图14是表示增加操作时的转向的状态的图。其中,图14A是增加操作之前的(时间t1)状态,图14B是增加操作中(时间t2)的状态。
图15是不实施转向角的限制的情况时的流程图。
图16是实施转向角的限制的情况时的流程图。
具体实施方式
以下,基于附图对实施方式进行详细说明。
图1~图16是用于该实施方式的说明。
[实施例1]
<构成>以下,对该实施例的构成进行说明。
如图1所示,通过将连接器2(图2)安装于汽车等的车辆1的后部,使拖车3连接于连接器2,来实施拖车3的牵引。
由于连接拖车3的车辆1(牵引车辆)的行为与普通车辆1不同,因此必须习惯于驾驶。例如,在车辆1与拖车3之间,由于车辆1的加速或减速等时的拖车3的惯性而在拖车3和车辆1之间产生速度差和角度变化,使拖车3相对于车辆1产生较大的如”く”的字状(或者L字状)的弯曲的所谓的折刀现象的可能性,从而需要注意陷入折刀现象。尤其是,驾驶牵引车辆在倒车时的驾驶操作较难,车辆1和拖车3形成的角度(拖车角4,图3)在一定程度上变大(折刀角度13)时,或者,拖车3相对于车辆1弯曲成急角度的状态时,由于折刀现象而使拖车3变得不动。另外,拖车角4能够由(以车辆1为基准)车辆前后方向X的朝向为0度的拖车3的左右(车辆宽度方向Y)的偏摆角等来显示(例如,可以设为右侧为+角度,左侧为-角度等(另外,+和-可以是相反的))。而且,图3的扇形范围的内侧是不发生小于折刀角度13的折刀现象的范围(后述的容许转向区域31)。
因此,相对于牵引拖车3的车辆1,设置有如图4所示的牵引辅助装置5。本实施例的牵引辅助装置5是用于提供辅助的装置,以使车辆1在倒车时不会陷入折刀现象。牵引辅助装置5通过安装在车辆1而成为车辆1的一部分。
本牵引辅助装置5具有以下构成(构造)。
“牵引辅助装置5的基本的构成”
(1)牵引辅助装置5包括:控制部11,其用于辅助由连接器2将拖车3连接于车辆1的倒车;显示器12,其至少在车辆1的倒车时,以从车辆前方侧朝向车辆后方侧观察后方的状态(图5)显示安装在车辆1的后部的连接器2的周围。
如图6所示,控制部11包括:警报角计算部15,其在倒车时,计算相等或者小于由车辆1和拖车3产生折刀现象的折刀角度13(图7)的角度的警报角度14(图7);警报产生部18,其在车辆1与拖车3形成的拖车角4超过警报角度14时,发出警报。
在此,拖车3是由车辆1牵引的被牵引车辆。拖车3是从动类型。
车辆1是牵引拖车3的牵引车辆。车辆1是自行推进可能(能够前进或者倒车等),并(通过左右的转向)能够变换方向或者改变方向。车辆1能够使用具有由乘员驾驶或者辅助乘员驾驶的功能,或者,代替乘员进行自动驾驶的功能(驾驶辅助车辆或者自动驾驶车辆等)。在驾驶辅助车辆或者自动驾驶车辆等的车辆1配备自动制动系统21或自动转向系统22(图6)中的至少一个。自动制动系统21和自动转向系统22安装在车辆1而成为诸如驾驶辅助车辆或者自动驾驶车辆等的车辆1的一部分。
控制部11主要由演算控制装置(安装在车辆1上计算机等)和安装在计算机上的控制软件构成,并且能够计算用于辅助拖车3的牵引而所需的各种控制量。在控制部11上直接或者经由信号处理装置24间接连接有用于获取连接器2的周围的图像的摄像机23等的影像获取单元。来自摄像机23以及信号处理装置24的信息,发送至后述的重叠显示部17,用于在显示器12上的显示。显示器12使用来自摄像机23以及信号处理装置24的信息显示连接器2周围的图像和图形。摄像机23和信号处理装置24作为牵引辅助装置5的一部分设置在车辆1中。牵引辅助装置5能够将来自摄像机23以及信号处理装置24的信息用于确认位于连接器2的车辆1和拖车3之间的连接状态。车辆1和拖车3之间的连接状态的确认可以通过使用诸如激光雷达(Lidar)等的雷达传感器或Milliwave等的毫米传感器等的周围状态检测装置来实施。摄像机23和周围状态检测部能够使用安装在车辆1的后部的结构(例如,后监视器用摄像机23a和后传感器23b等,图8)。信号处理装置24是用于将来自摄像机23的信号处理并传递至控制部11的装置。信号处理装置24可以作为控制部11的外部构成设置,也可以作为控制部11的内部功能设置。
此外,控制部11设置有存储器25等,其用于存储有关牵引辅助装置5的各种的信息和数据等(图6)。存储器25可以设置在控制部11的内部(内部存储器),也可以设置在外部(外部存储器)。
连接器2是用于将拖车3连接于车辆1的夹具。拖车3以设置在连接器2的连接点26(图3)为中心左右可旋转地连接。在本实施例中,连接器2的连接点26作为车辆1和拖车3的连接部。
“连接器2的周围”是指,连接器2以及连接于连接器2的拖车3的前部等。
后视图的状态是指以大致水平(或者,相对于水平稍微向上或者向下)观察车辆1的后侧的视图的状态。
显示器12能够使用液晶面板或有机EL面板等的显示装置。显示器12优选使用设置在车辆1的车室内(特别是车室前部)的结构。显示器12可是专门用于牵引辅助装置5而设置,也可以引用设置在车辆1的其他的電子设备(例如,具有显示器的仪表装置,汽车导航系统,车载电视或者行车记录仪)等的设备。另外,如果在摄像机23使用后监视器用摄像机23a或其他的摄像机的情况时,能够将由摄像机拍摄的连接器2的周围的图像(运动图像)显示在显示器12上。此外,代替图像可以将描绘连接器2的周围的图形(动画)等显示在显示器12上。显示器12通过具备触摸面板27等,能够将触摸面板27作为输入装置使用于牵引辅助装置5。在此情况下,在控制部11具备输入部28,其用于输入来自触摸面板27的信号。
如图9所示,折刀角度13(Jackknife angle)是例如通过将车辆1以及拖车3的各参数(车辆规格)代入线性几何关系表达式(式1)而计算。在关系表达式中的D是从连接器2的连接点26至拖车3的从动轮3a(中心)的距离,W是车辆1的前轮1a(的中心)和后轮1b(的中心)之间的距离(轴距),L是从车辆1的后轮1b(的中心)至连接器2的连接点26的距离,δ是车辆1的轮胎角度,γc是折刀角度13。
在本实施例中,车辆1的前轮1a是转向轮(转向轮)。D、W、L等的参数是,例如,从输入部28输入,并能够存储在存储器25。折刀角度13是该车辆1以及拖车3的固有值(固定值),并且在车辆前后方向X的两侧左右对称地以相同角度存在。折刀角度13,例如可以将预先计算的值由触摸面板27输入至控制部11,并通过存储在存储器25,从而能够随时在控制部11上使用。此外,可以将在控制部11的内部计算的值直接或者通过存储在存储器25而使用。在控制部11设置专用的折刀角度计算部,例如,将警报角计算部15等作为折刀角度计算部,能够在专用的折刀角度计算部和警报角计算部15上计算折刀角度13。
警报角度14是用于产生警报的阈值的角度。警报角度14能够设定为与折刀角度13相同,但是为了更早地产生警报,优选设定为小于折刀角度13的角度。但是,如果警报角度14过小,则容易经常产生警报而变得成为烦躁音且不切实际。因此,警报角度14优选设置为实际运用中最适当的角度,不能够太小,也不能够太大。此外,警报角度14可以设置为固定值,但是优选设置为能够对应车辆1和拖车3的状态而随时间变化的可变值,以便优化警报角度14。通常情况下,警报角度14将车辆前后方向X设为0度,并在车辆前后方向X的两侧以相同的角度左右对称设置。警报角度14将在后面描述。
警报角计算部15是用于计算警报角度14的控制部11的功能部分。警报角计算部15顺次计算对应车辆1和拖车3的状态随时间变化的最佳警报角度14。
拖车角4是车辆1和拖车3之间的弯曲角(图9),并且是穿过连接器2的连接点26的,由车辆1的宽度中心线和拖车3的宽度中心线形成的角度。拖车角4是随时间变化的值,由控制部11计算。在控制部11上设置有用于计算拖车角4的拖车角计算部34。拖车角计算部34例如能够将从摄像机23的信息输入并且通过实施图像识别处理和数据分析处理等来获得拖车角4。
此外,例如,可以通过将拖车角速度与经过时间进行积分来计算拖车角4。在此情况下,可以通过将上述的D、W、L的参数,或车速V,或轮胎角度δ等代入关系表达式(图9的式2)来计算拖车角速度。车速V和轮胎角度δ是随时间变化的值。而且,由于从摄像机23的信息通过图像识别处理和数据分析处理而获得拖车角4(实际的拖车角4)和,从拖车角速度计算的拖车角4(计算的拖车角4)基本上是相同的值,因此拖车角计算部34可以使用其中任何一个来获得拖车角4。另外,可以将拖车角计算部34作为上述的折刀角度计算部,在拖车角计算部34上计算上述的折刀角度13。
警报产生部18是控制部11的功能部分,用于向安装在车辆1上的警报装置35产生警报。在警报装置35中,能够使用例如显示器12和安装在车辆1上的電子设备(例如,汽车导航系统或者车载电视或者汽车音频系统等)等的功能。警报能够通过声音或显示等来发出。声音警报例如可以通过显示器12或安装在车辆1上的電子设备所具备的扬声器36或者蜂鸣器等产生。显示警报例如可以通过显示器12实施。通过显示器12的显示警报例如可以将颜色的变化和警告文字和警告用图形等的显示等适当组合来实施。在本实施例中,当拖车角4超过警报角度14时发出警报音。此外,拖车角4超过折刀角时,在显示器12的画面上或者将在显示器12上以蓝色显示的扇形内侧区域16变更为黄色等的警告颜色来显示。但是,显示警报不限于上述结构,或者,警告颜色不限于黄色。另外,警报产生部18的功能可以被提供给警报角计算部15。
(2)控制部11可以包括重叠显示部17,该重叠显示部17将位于警报角度14的内侧的内侧区域16中的至少一部分重叠于连接器2的位置并显示在显示器12(图5)。
在此,内侧区域16(图7)是夹在位于(设定为)左右两个折刀角度13之间的左右两个警报角度14的扇形范围。重叠显示部17基于来自警报角计算部15的警报角度14在显示器12上显示内侧区域16。左右两个折刀角度13之间的角度是不会引起折刀现象的容许转向区域31(图7),并且其中,位于左右两个警报角度14的之间的内侧区域16是能够安心实施转向的不会引起折刀现象的安全区域,或者是不产生警报的非警报区域。而且,折刀角度13与警报角度14之间的角度是处于陷入折刀现象之前的警戒区域32(图7),或者是产生警报的警报区域。而且,比左右两个折刀角度13外侧的角度是引起折刀现象的产生区域。
设为扇形的内侧区域16的至少一部分,例如着色为蓝色等的颜色而能够容易识别地显示在显示器12上。据此,通过观察显示器12,能够确定拖车角4(或者连接器2)是否包含在蓝色的内侧区域16的范围内,并且,能够容易地实施倒车而使车辆1包含在内侧区域16的范围内,使得良好的引导车辆1的倒车而能够有效地防止折刀现象的产生。另外,内侧区域16的颜色不限于蓝色。此外,当使用对应车辆1和拖车3的状态而计算的警报角度14的情况时,内侧区域16的大小随时间而变化。
内侧区域16的至少一部分是指内侧区域16的全部或者一部分。由于内侧区域16是安全区域,所以拖车角4包含在内侧区域16的一部分即可,因此,构成为只显示内侧区域16的一部分也能够达到辅助车辆1的倒车的目的。另外,显示器12的内侧区域16的显示在结构上(构成上),能够最大限度地扩展至在左右折刀角度13之间的左右容许转向区域31。
重叠显示部17是控制部11的功能部分,其用于至少在显示器12(图5)上同时显示连接器2的周围的图像或者图形和成扇形的内侧区域16的至少一部分。重叠显示部17能够在显示器12上实施其他的显示,但是通过仅显示连接器2的周围的图像或者图形和成扇形的内侧区域16的至少一部分的这两个,使得显示可在最低要求范围内的简单的结构,并且最容易看到。另外,本实施例中,除了上述之外,还可以根据需要显示后述的目標拖车角65和转向限制角61的线。
(3)警报角计算部15可以基于折刀角度13,使用车速、加速度、转向角以及拖车角速度中的至少一个,实时更新警报角度14,重叠显示部17将更新的警报角度14的内侧区域16的至少一部分顺次显示在显示器12。
在此,车速是车辆1和拖车3的速度。车速可以从设置在车辆1和拖车3的车速传感器等获得。
加速度是由于振动或冲击等作用于车辆1和拖车3上而引起的速度变化量。加速度可以从设置在车辆1和拖车3上的加速度传感器等获得。
转向角是车辆1的转向盘的转向角。转向角能够从车辆1的舵角传感器等获得。另外,在本实施例中,轮胎角度被视为与转向角基本相同。
拖车角速度是以连接器2的连接点26为中心的拖车3的旋转运动的速度。如上所述,拖车角速度由拖车角计算部34计算。车速、加速度、转向角、拖车角速度是随时间变化的物理量。
警报角度14例如可以通过将折刀角度13乘以从车速,加速度,转向角,或者拖车角速度等获得的增益来获得。
警报角度14=折刀角度13×增益
增益被创建为小于1的值。增益例如可以通过,”地图值/实际值”等的表达式来获得。该式被设计为随着分母(实际值)的增大而增益(以及警报角度14)变小,随着分子(地图值)的增大而增益(以及警报角度14)变大。
具体而言,获得增益的式,
“车速的地图值/实际车速的值”
“加速度的地图值/实际加速度的值”
“转向角的地图值/实际转向角的值”
“拖车角速度的地图值/实际拖车角速度的值”等中的至少一个。
地图例如是,如图10A~D所示,将水平轴设为当前的拖车角4,将垂直轴设为上述的变化的物理量的阈值,并例如设置为按比例增加的线性函数等。地图值是由地图获得的值。地图值作为当前的拖车角4的函数值(例如,拖车速度阈值,拖车加速度阈值,轮胎角度阈值,拖车角速度阈值等的各阈值)被求出。从各物理量获得增益例如彼此相乘以获得一个增益。例如,折刀角度13为30度且增益为0.83··的情况时,警报角度14为(30×0.83··=)25度。
如上所述的牵引辅助装置5的基本的结构(构成)主要适用于乘员驾驶的车辆1,但是也可以适用于驾驶辅助车辆以及自动驾驶车辆。
“关于牵引辅助装置5的附加功能”
(4)控制部11可以包括推定时间计算部41,该推定时间计算部41使用拖车角速度求出到达折刀角度13为止的推定时间。
在此,推定时间是,拖车角4成为折刀角度13为止的所需时间(裕度时间或者宽限时间)的推定值。在假设一定的车速和一定的轮胎角度以原样继续,并且由于通过拖车角速度在一定的经过时间积分来能够获得拖车角4,因此通过计算该拖车角4与折刀角度13形成一致为止所需要的经过时间而能够获得推定时间。但是,车速和轮胎角度是根据车辆1和拖车3的状态随时间变化的,所以推定时间也随时间变化。拖车角速度可以单独通过推定时间计算部41计算,也可以将在警报角计算部15上用于拖车角4的计算的值输入并使用。以上这种计算并获得的推定时间,例如被发送到警报产生部18,并在警报产生部18中推定时间低于预定时间时,能够用于在警报装置35中产生警报。在此情况下的例如可以基于乘员实施制动操作所需的反応时间等来设定最佳的预定时间。此外,推定时间也可以用于后述的使用方法。
推定时间计算部41是控制部11的功能部分,其用于求得到达折刀角度13为止的推定时间。
另外,推定时间计算部41是针对上述的基本结构的牵引辅助装置5设定的附加的结构,但是如果不需要监视拖车角4是否超过警报角度14,可以设置为仅监视推定时间是否低于预定时间的结构的情况时,控制部11例如,将推定时间计算部41和将(折刀角度13的内侧的)容许转向区域31的至少一部分重叠在连接器2的位置并显示在显示器12(图5)上的重叠显示部17作为基本结构,还可以包括例如在推定时间低于预定时间时产生警报的警报产生部18或者其他后述的构成等。
(5)控制部11可以包括制动操作部44,当推定时间计算部41的推定时间低于第一设定时间时,该制动操作部44向设置在车辆1的自动制动系统21发出紧急停止车辆1的制动操作信号43(图6)。
在此,作为第一设定时间,通过自动制动系统21紧急停止(紧急停车)车辆1所需要的时间等的最佳时间设定在制动操作部44。第一设定时间能够根据车辆1或者安装在车辆1(驾驶辅助车辆或自动驾驶车辆等的车辆1)上的自动制动系统21的性能等来分别设定。第一设定时间例如能够设为0.8秒等。但是,第一设定时间不限于0.8秒。
自动制动系统21是安装在驾驶辅助车辆或在自动驾驶车辆等的车辆1的用于自动控制制动的操作的系统。
制动操作信号43是指,在自动制动系统21实施用于紧急停车的制动操作的信号(紧急制动信号)。
制动操作部44是控制部11的功能部分,该制动操作部44与车辆1的自动制动系统21实施通信,并向自动制动系统21发送(推定时间低于第一设定时间时)用于操作制动的制动操作信号43。当自动制动系统21接受制动操作信号43时,操作制动例如以1G的加速度紧急停止车辆1。
(6)控制部11可以包括紧急转向部47,该紧急转向部47在推定时间计算部41的推定时间低于比第一设定时间短的第二设定时间时,向设置在车辆1的自动转向系统22发送紧急转向信号46,使车辆1实施拖车角4向小的方向的紧急转向(紧急转向)。
在此,作为第二设定时间,将通过自动转向系统22使车辆1紧急转向时的所需时间等的最佳时间被设定在紧急转向部47。第二设定时间能够根据安装在车辆1(驾驶辅助车辆或自动驾驶车辆等的车辆1)的自动转向系统22的性能而分别设定。第二设定时间能够设为例如0.6秒等。但是,第二设定时间不限于0.6秒。
自动转向系统22是安装在驾驶辅助车辆或自动驾驶车辆等的车辆1的以自动控制转向(转向)的系统。
紧急转向信号46是为了让自动转向系统22实施紧急转向的转向信号54。
紧急转向部47是控制部11的功能部分,该紧急转向部47与车辆1的自动转向系统22实施通信,并向自动转向系统22发送用于实施(推定时间低于第二设定时间时)紧急转向的紧急转向信号46。当自动转向系统22收到紧急转向信号46时,例如,以最大扭矩将轮胎角转向至0度。紧急转向部47以辅助制动操作部44而被设置。
以上的结构适用于转向能够实施至超过折刀角度13的最大转向角(转向角没有特别限制)的车辆1(例如,驾驶辅助车辆以及自动驾驶车辆)。
“关于牵引辅助装置5的另一功能”
(7)控制部11可以包括转向限制部53(图6),该转向限制部53向安装在车辆1的自动转向系统22发送将车辆1的转向可能区域51限制在警报角度14的内侧区域16内(图11)的转向可能区域限制信号52。
在此,转向可能区域51是能够实施转向的区域,在通常情况下,在车辆1的左右的最大转向角的范围内。本实施例中,通过限制转向可能区域51,转向可能区域51成为比车辆1的左右的最大转向角狭小的范围。转向可能区域51根据车辆1和拖车3的状态,随时间变化。在本实施例中,转向可能区域51自动限制为能够容纳于相同或狭窄于警报角度14的内侧区域16的范围内的转向角。据此,不能够实施超过警报角度14的转向或者自动转向。
另外,转向可能区域51可以构成为限制转向角不超过折刀角度13(容许转向区域31)的范围(例如,图12A)。在此情况下,例如,控制部11可以是包括重叠显示部17和转向限制部53的构成,该转向限制部53向自动转向系统22发送将车辆1的转向可能区域51限制在成为折刀角度13的内侧的容许转向区域31内的转向可能区域限制信号52,该重叠显示部17将容许转向区域31的至少一部分重叠于连接器2的位置并显示在显示器12(图5)。
转向可能区域限制信号52是用于让自动转向系统22实施转向限制的转向信号54。转向可能区域限制信号52在车辆1的倒车时向自动转向系统22发送。
转向限制部53是控制部11的功能部分,该转向限制部53与车辆1的自动转向系统22实施通信,并使自动转向系统22实施限制在警报角度14的内侧区域16内(或者容许转向区域31内)的自动转向。通过具备该转向限制部53,使车辆1在倒车时不能够实施超出警报角度14的内侧区域16(或者容许转向区域31)的转向(即,车辆1能够实施倒车而不陷入折刀现象)。因此,可以不具备上述的制动操作部44和紧急转向部47的功能,但是从构成上可以将转向限制部53的功能和制动操作部44或者紧急转向部47的功能组合。另外,转向限制部53和紧急转向部47可以共同配置为一个功能部分的结构。
以上的构成(结构)主要适用于驾驶辅助车辆和自动驾驶车辆等的车辆1,但是也可以适用于乘员驾驶的车辆1。在此情况下,例如只要向车辆1的动力转向马达发送转向可能区域限制信号52,则能够限制转向角。
(8)控制部11可以设为,具有转向限制角计算部62(图6),该转向限制角计算部62在由自动转向系统22实施车辆1的倒车辅助时求出不引起折刀现象的转向限制角61(图12B),重叠显示部17将转向可能区域51变窄至转向限制角61附近并显示在显示器12上,转向限制角计算部62可以从转向限制部53向自动转向系统22发送转向可能区域限制信号60(图6),该转向可能区域限制信号60是用于将车辆1的转向可能区域51限制在由转向限制角61变窄的限制区域63内。
在此,车辆1的倒车辅助是用于辅助牵引拖车3的车辆1的倒车的功能,并具备驾驶辅助车辆或自动驾驶车辆等的车辆1的自动转向系统22和安装在乘员驾驶的车辆1的倒车辅助系统。倒车辅助系统是作为用于辅助牵引车辆特有的倒车的辅助的功能被安装在车辆1上。倒车辅助系统例如是用于向车辆1的动力转向马达发送控制信号并控制倒车时的转向。以下,在自动转向系统22中包含倒车辅助系统的结构进行说明。在针对车辆1(牵引车辆)的倒车辅助中实施增加操作64(打轮)(图13B)的操作。增加操作64的信息例如能够通过通信从自动转向系统22或者倒车辅助系统发送向控制部11。
即,在由自动转向系统22和倒车辅助系统的倒车辅助中,例如,如图13A所示,如果将拖车角4返回相对侧的方式实施时(或者,变更拖车角4的符号时),以更快变更拖车角4的方式,实施如图13B所示那样的实施与变更之前的方向相同方向转向(向相同侧实施一次较大的打轮后向相对侧回轮)的称为增加操作64的特殊转向。另外,图13A中的实线表示控制拖车角度,虚线是表示拖车角4实时变化的状态。此外,图13B是表示为了将拖车角4变化为如图13A的转向角的变化。该增加操作64相对频繁地实施。
然后,当执行这样的增加操作64时,由于整体上大于转向量或者转向方向突然变化,使拖车3被大大地晃动等,使其导致陷入折刀现象的可能性。增加操作64时的转向量根据拖车角4的变更角度(目標拖车角65(图13A))而不同。另外,变更拖车角4的目標拖车角65根据车辆1和拖车3的状态而随时间变更。目標拖车角65可以设为自动设置在自动转向系统22或倒车辅助系统并发送向控制部11,也可以设为乘员使用触摸面板27等直接向控制部11的输入部28输入。
转向限制角61是拖车3的角度(限制目標拖车角),该拖车3的角度设定在用于限制拖车角4朝向目標拖车角65的突然角度变化的当前的拖车角4与目標拖车角65之间。而且,自动转向系统22和倒车辅助系统不是以目標拖车角65为目标而是以转向限制角61为目標逐渐接近目標拖车角65的方式进行转向控制。此时,转向限制角61以接近目標拖车角65的方式随时间变化。
因此,通过设置转向限制角61,只能进行直到转向限制角61的转向,如图12A所示,由自动转向系统22的转向可能区域51(内侧区域16或者容许转向区域31)实际上是如图12B所示那样,变窄至转向限制角61的范围(限制区域63或者转向可能限制区域)。通过限制由转向限制角61的转向可能区域51(的目標拖车角65侧的部分),如图12A所示那样成为左右对称的转向可能区域51成为如图12B所示的左右非对称的限制区域63。另外,限制区域63可以设置为比转向限制角61略向(例如,3度~5度程度)目標拖车角65侧拓宽。此外,在显示器12优选显示左右非对称的限制区域63,但是也可以原样显示施加由转向限制角61的转向限制之前的转向可能区域51。
另外,图12A以及图14A是,在图13中的最后实施增加操作64的情况时的,对应时间t1(增加操作64之前)的图,图12B以及图14B是对应图13的时间t2(增加操作64的中途)图。而且,在最后实施增加操作64的情况时,在前一个时间t1上,目標拖车角65与其时间点上的拖车角4相一致,而在时间t2上,目標拖车角65为0度,转向限制角61大于0度,成为目標拖车角65和拖车角4之间的值。相对于在时间t1处,轮胎角度在时间t2处大大切向(大大转向)与目標拖车角65相反侧(δ(t1)→δ(t2))。
具体的转向限制角61可以以任何方式设定,例如,
转向限制角61=(折刀角度13-当前的拖车角4)-目標拖车角65可以使用如上等式计算。通过使用这样的等式计算转向限制角61,能够将转向限制角61抑制为小于目標拖车角65的转向量。转向限制角61可以与变窄的限制区域63以及连接器2的周围的显示一同例如通过红线等显示在显示器12上。但是,表示转向限制角61的线不限于红线。另外,可以显示或者不显示目標拖车角65。在本实施例中,除了必要的情况之外,没有特意显示目標拖车角65。
转向限制角计算部62是控制部11的功能部分,该转向限制角计算部62向转向限制部53发送计算的转向限制角61,并将车辆1的转向可能区域51限制在通过转向限制角61被变窄的限制区域63内。转向限制部53是控制部11的功能部分,该转向限制部53与车辆1的自动转向系统22实施通信,并对自动转向系统22发出转向可能区域限制信号60,以实施限制在被变窄的限制区域63内的自动转向。
通过具备这样的转向限制角计算部62以及转向限制部53,能够在限制区域63的范围内限制并实施车辆1的倒车(即,即使实施了增加操作64也通过缓慢转向实施车辆1的倒车而使得不陷入折刀现象)。因此,可以没有上述的制动操作部44和紧急转向部47的功能,但是可以通过将转向限制角计算部62以及转向限制部53的功能和制动操作部44或紧急转向部47的功能组合构成。另外,在这样的限制区域63的范围内实施的倒车可以设定为仅在实施增加操作64期间实施,但是也可以设为不限于增加操作64而在倒车期间连续实施。
此外,乘员设定目標拖车角65的情况时,例如能够使用以下构成。
即,可以包括:触摸面板27,其能够输入拖车3的倒车方向的目標拖车角65等;转向限制角计算部62,其基于向触摸面板27的触摸的位置作为目標拖车角65的输入,并输入的目標拖车角65计算转向限制角61;重叠显示部17,其将计算的转向限制角61显示在显示器12上。
在此情况下,类似于上述,转向限制角计算部62,从转向限制部53向自动转向系统22发送将车辆1的转向可能区域51限制在通过转向限制角61变窄的限制区域63内的转向可能区域限制信号60,并且转向限制部53基于转向可能区域限制信号60,与车辆1的自动转向系统22实施通信,使自动转向系统22实施限制在变窄的限制区域63内自动转向。
而且,转向限制角61被计算为成为此时的拖车角4和目標拖车角65之间的角度。在显示器12上上述的限制区域63与转向限制角61一同显示。
据此,例如,当显示器12是触摸面板27的情况时,乘员用手指触摸该触摸面板27,将手指触摸的显示器12上的位置与连接器2的连接点26连接的线的角度作为目標拖车角65能够容易地输入,并将基于目標拖车角65而获得转向限制角61逐渐显示在显示器12的同时,能够缓慢抑制转向量和转向角,以使不不直接朝向目標拖车角65突然转向。
另外,上述的项目的构成能够在可能的范围内适当地组合使用。
<作用>以下,对本实施例的作用进行说明。
在连接有拖车3的车辆1中,在倒车的时,当车辆1与拖车3之间的角度(拖车角4)大于某个水平(折刀角度13)时,由于所谓的折刀现象而使拖车3不能动。当产生这样的折刀现象时,由于相对成为停止状态的拖车3倒车的车辆1可能与该拖车3碰撞,因此必须小心地实施车辆1的倒车,以免引起折刀现象。
因此,本实施例的牵引辅助装置5如下的方式辅助车辆1(牵引车辆)的倒车。
图15是表示由牵引辅助装置5的控制部11的控制(未限制转向角的情况)的一例的流程图。
当开始车辆1的倒车时,开始实施控制,在S1中,拖车角计算部34计算拖车角4(取得拖车角)。拖车角4可以通过对来自摄像机23的信息进行图像识别处理或数据分析处理,或者,通过将拖车角速度与经过时间进行积分来计算并获得。拖车角速度可通过将车辆1或拖车3的参数(D,W,L)或车速V或轮胎角度δ等代入关系表达式(图9的式2)来计算。拖车角计算部34计算的拖车角4传递至警报产生部18和控制部11内的各部并在各部被使用。
接下来,在S2中,警报角计算部15计算警报角度14。基于折刀角度13,并使用车速、加速度、转向角、拖车角速度中的至少一个计算警报角度14。通过将车辆1以及拖车3的各参数代入线性几何的关系表达式来计算折刀角度13。车速、加速度、转向角、拖车角速度被使用于求出增益。通过将增益乘以折刀角度13来计算警报角度14。在警报角计算部15计算的警报角度14传递至警报产生部18、重叠显示部17和控制部11内的各部并在各部被使用。
接下来,在S3中,重叠显示部17将在摄像机23拍摄的实际的连接器2的图像(或图形)显示在显示器12上的同时,将警报角度14的内侧区域16重叠于连接器2的图像或图形并显示在显示器12上。
接下来,在S4中,警报产生部18判断来自拖车角计算部34的拖车角4是否在来自警报角计算部15的警报角度14的内侧区域16内,如果拖车角4在内侧区域16内的情况时,返回S1重复上述步骤,如果拖车角4出了内侧区域16的情况时,在S5中,在警报产生部18产生警报。乘员通过该警报实施制动操作。乘员在驾驶车辆1的情况时,在S5中通过警报提示乘员实施制动操作之后,返回S1重复上述步骤。
此外,在自动驾驶车辆和驾驶辅助车辆的情况下,在S5之后,在S6中,推定时间计算部41使用拖车角速度计算超过折刀角度13为止的推定时间(估计时间)。通过将拖车角速度与一定的经过时间进行积分获得拖车角4的同时,通过计算该拖车角4与折刀角度13相一致为止所需要的经过时间来能够获得推定时间。
接下来,在S7中,制动操作部44监视在推定时间计算部41计算的推定时间是否低于第一设定时间,并在推定时间不低于第一设定时间的情况时,返回S1并重复上述步骤,当推定时间低于第一设定时间时,在S8中,制动操作部44向车辆1的自动制动系统21发送制动操作信号43,紧急停止(紧急停车)车辆1。
此外,在S9中,紧急转向部47监视在推定时间计算部41中计算的推定时间是否低于第二设定时间,并在推定时间不低于第二设定时间的情况时,返回S1并重复上述步骤,当推定时间低于第二设定时间时,在S10中,紧急转向部47向车辆1的自动转向系统22发送紧急转向信号46,可以实施车辆1的紧急转向,以免产生折刀现象。
此外,当限制转向角使得不发生折刀现象的情况的控制部11的控制例如如图16所示。另外,由于S11~S13与图15的S1~S3中的几乎相同,因此将省略描述。此外,通过根据转向角是否被限制来进行条件分支,能够将图15和图16的控制组合为一个。
而且,在S14中,转向限制部53向自动转向系统22发送转向可能区域限制信号52,将转向可能区域51限制在来自警报角计算部15的警报角度14的内侧区域16内(或者容许转向区域31内),并返回S1并重复上述步骤。据此,转向角被限制,能够以不陷入折刀现象方式实施车辆1的倒车。
进一步,在具备具有增加操作64的倒车辅助功能的自动转向系统22的车辆1的情况下,在S15中,控制部11通过与自动转向系统22或倒车辅助系统进行通信来监视增加操作64的有无,当没有实施增加操作64的情况时,返回S1并实施上述步骤,当实施增加操作64的情况时,在S16中,转向限制角计算部62计算转向限制角61,转向限制部53向车辆1的自动转向系统22发送转向可能区域限制信号60,并将转向限制角61限制在由转向限制角61缩窄形成的限制区域63内。转向限制角61被适当设定为通过转向限制角计算部62的当前的拖车角4和目標拖车角65之间的值。据此,通过缓慢的转向来实施车辆1的倒车,从而防止折刀现象的产生。据此,优选将显示器12的显示变更为限制区域63,但是也可以不必变更。之后,返回S1并实施上述步骤。
另外,上述图15和图16的流程图仅是示例,其顺序可以稍有不同。
<效果>根据本实施例,能够获得以下的效果。
(效果1)牵引辅助装置5具备控制部11和显示器12。控制部11构成为能够辅助由连接器2连接有拖车3的车辆1的倒车。据此,乘员通过接收控制部11的辅助的同时,通过观察显示器12能够以预定目標容易地倒车连接有拖车3的车辆1。
即,显示器12至少在车辆1的倒车时,以从车辆前方侧观察车辆后方侧的后视的状态显示安装在车辆1的后部的连接器2的周围。据此,由于显示器12的显示可看到(观察到)与从驾驶坐席观察车辆后方侧的视图相近的状态,因此能够实施感官上清楚的显示。因此,乘员仅通过观察牵引辅助装置5的显示器12就能够获得充分的辅助。
而且,控制部11至少具有警报角计算部15和警报产生部18。警报角计算部15在倒车时,求出车辆1和拖车3之间的角度相同或小于引起折刀现象的折刀角度13的警报角度14。据此,能够判断车辆1和拖车3形成的拖车角4是否在警报角度14内,如果拖车角4在警报角度14内,能够判断没有陷入折刀现象。因此,通过保持拖车角4在警报角度14内的状态的方式引导车辆1的倒车而能够避免折刀现象(折刀现象)。
当拖车角4超过警报角度14时,警报产生部18产生警报。据此,乘员可以安心的实施车辆1的倒车直到产生警报,并且在产生警报时,通过踩下制动等,在陷入折刀现象之前,确切地停止车辆1或者避免折刀现象。因此,例如,如上述的专利文献1的那样,通过控制旋钮等的操作间接地实施车辆1的转向操作,从而能够获得不会感受到视图避免折刀现象的麻烦的牵引辅助装置5。
(效果2)控制部11可以具备将位于警报角度14的内侧的内侧区域16的至少一部分与连接器2的位置重叠并显示在显示器12的重叠显示部17。据此,能够一眼就掌握连接器2的状态(例如,拖车角4的实际状态等)与警报角度14的内侧区域16之间的关系,并且能够通过清楚易懂且不浪费时间的简单的形式将拖车角4是否进入警报角度14的内侧区域16显示在显示器12上来通知乘员。而且,乘员通过观察显示器12的显示,能够实时确认拖车角4是否进入了警报角度14的内侧区域16的同时能够容易地实施车辆1的倒车。
(效果3)警报角计算部15基于折刀角度13,至少使用车速、加速度、转向角以及拖车角速度中的一个,不断地更新警报角度14。据此,总是能够获得最新的警报角度14,并且能够使用最新的警报角度14来更佳准确地实施各种控制等。重叠显示部17能够将基于更新的警报角度14的内侧区域16的至少一部分顺次显示在显示器12上。据此,显示器12总是可以被更新为最新的显示,乘员能够从显示器12获得最新的信息。
(效果4)控制部11可以具备推定时间计算部41。推定时间计算部41使用拖车角速度可求得到达折刀角度13为止的推定时间。据此,基于求得的推定时间监视拖车角4,或者可以对车辆1进行各种控制。
(效果5)控制部11可以具备制动操作部44。当推定时间计算部41的推定时间小于第一设定时间时,制动操作部44向安装在车辆1上的自动制动系统21发送制动操作信号43,使自动制动系统21紧急停止车辆1。据此,通过自动制动系统21实施制动操作并紧急停止车辆1,能够自动回避车辆1陷入折刀现象。
(效果6)控制部11可以具备紧急转向部47。当推定时间计算部41的推定时间小于相比第一设定时间更短的第二设定时间时,紧急转向部47向安装在车辆1的自动转向系统22发送紧急转向信号46,使自动转向系统22以拖车角4变小的方向实施紧急转向。据此,即使仅通过由自动制动系统21的制动进行的回避操作不能够回避的情况时,通过自动转向系统22实施为了回避折刀现象的紧急转向,能够自动回避车辆1陷入折刀现象。
(效果7)控制部11可以具备转向限制部53。转向限制部53向安装在车辆1的自动转向系统22发送转向可能区域限制信号52,将车辆1的转向可能区域51限制在警报角度14的内侧区域16内(或者容许转向区域31内)。据此,由于自动转向系统22可以仅在不超过警报角度14(或者折刀角度13)的范围内进行自动转向,因此能够预先防止车辆1陷入折刀现象。
(效果8)控制部11可以具有转向限制角计算部62。当由自动转向系统22实施车辆1的倒车辅助时,转向限制角计算部62求出用于不引起折刀现象的转向限制角61。而且,重叠显示部17可以将转向可能区域51变窄至转向限制角61附近并显示在显示器12上。转向限制角计算部62从转向限制部53将车辆1的转向可能区域51限制在通过转向限制角61变窄的限制区域63内的转向可能区域限制信号60发送至自动转向系统22。而且,自动转向系统22基于转向可能区域限制信号60将车辆1的转向可能区域51限制在通过转向限制角61变窄的限制区域63内。
据此,由于自动转向系统22的转向可能区域51被限制在通过转向限制角61变窄的限制区域63内,从而不能实施大角度转向或急转向,因此在自动转向系统22实施倒车辅助期间,当自动转向系统22例如为了尽快将拖车角4实施为0度等,而实施伴随大角度转向或急转向的增加操作64等的情况时,由于能够抑制增加操作64时的转向量,因此能够防止由增加操作64引起的车辆1陷入折刀现象。
[符号说明]
1 车辆
2 连接器
3 拖车
4 拖车角
5 牵引辅助装置
11 控制部
12 显示器
13 折刀角度
14 警报角度
15 警报角计算部
16 内侧区域
17 重叠显示部
18 警报产生部
21 自动制动系统
22 自动转向系统
23 摄像机
41 推定时间计算部
43 制动操作信号
44 制动操作部
46 紧急转向信号
47 紧急转向部
51 转向可能区域
52 转向可能区域限制信号
53 转向限制部
60 转向可能区域限制信号
61 转向限制角
62 转向限制角计算部
63 限制区域
X 车辆前后方向
- 牵引销拆装辅助机构及牵引销拆装辅助装置
- 一种用于胫骨牵引的辅助牵引装置